
航海雷达溢油监测的同频干扰降噪处理方法研究
2017-06-19 18:47徐进,李博,崔璨,刘鹏
测绘通报 2017年5期
徐 进,李 博,崔 璨,刘 鹏
(1. 大连海事大学航海学院,辽宁 大连 116026; 2. 辽宁水文地质工程地质勘察院实验室,辽宁 大连 116037)
航海雷达溢油监测的同频干扰降噪处理方法研究
徐 进1,李 博2,崔 璨1,刘 鹏1
(1. 大连海事大学航海学院,辽宁 大连 116026; 2. 辽宁水文地质工程地质勘察院实验室,辽宁 大连 116037)
首先提出了在平面坐标下进行航海雷达同频干扰噪声处理;再采用卷积运算方法和Otsu算法分割航海雷达原始数据中的同频干扰噪声信号;最后应用横向均值运算方法处理同频干扰噪声。这种处理方法在对同频干扰进行降噪处理的同时,保留了含有溢油信息的海浪杂波信号,为航海雷达溢油监测技术的研究提供了更为准确的基础数据。
同频干扰;航海雷达;海杂波;溢油监测
据统计,每年泄入海洋的石油及其产品约占世界石油总产量的0.5%以上[1-2]。不断发生的溢油事件给人们敲响警钟,海上溢油监测技术迅猛发展[3-4]。航海雷达溢油监测技术是目前唯一能够全天时在恶劣天气下进行大面积探测的溢油监测技术[5]。但是,基于航海雷达进行海上溢油监测技术研究的数据基础是带有海杂波信号的航海雷达原始数据。而航海雷达原始数据中还包含同频干扰、斑点、假目标等干扰噪声[6],处理这些噪声是航海雷达海上溢油监测技术研究的首要工作[7-8]。本文针对航海雷达含有海杂波原始数据中的同频干扰噪声,进行降噪处理技术研究。
1 同频干扰噪声
航海雷达在进行海浪或目标探测工作过程中,经常会受到本船或其他船舶的同频段雷达干扰,接收机接收其他雷达发射的电磁波反射信号后,在雷达灰度图像上产生射线状噪声,即同频干扰[9]。在航海雷达海杂波图像中,同频干扰噪声是比较主要的噪声类型,如图1所示。
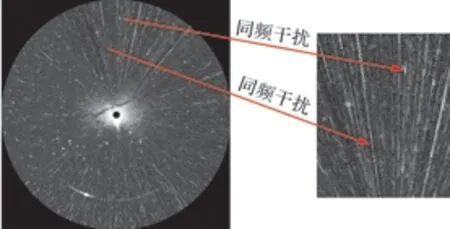
图1 雷达图像噪声示例
由于同频干扰是航海雷达天线接收端方向上产生的噪声,在雷达图像上表现为方位角方向的信号噪声[10]。在处理这种噪声时,本文拟在以方位角为横轴方向、以量程回波信号为纵轴方向的图像坐标系统中(如图2所示)进行降噪处理。
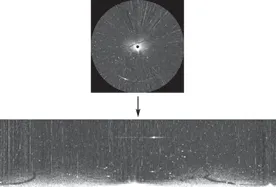
图2 航海雷达坐标系统转换示例
2 同频干扰噪声分割方法对比
2.1 Otsu图像分割

(1)
(2)
于是可得类间方差为
(3)
进一步可得
(4)
最佳阈值T*的选取原则即为
(5)
Otsu算法在分割目标和背景时,利用类间方差最大值求得最佳阈值T*,从而实现灰度图像的二值化[11-14]。采用Otsu对以量程为纵轴方向的原始灰度图像进行图像二值化处理,如图3所示。

图3 Otsu图像二值化结果
航海雷达图像中同频干扰的灰度值表现为较高亮度,而Otsu在较好地提取识别同频干扰的同时,也将海浪杂波目标和其他噪声分割出来。
2.2 卷积运算和噪声分割
从数学意义角度讲,卷积是两组变量相乘后求和的结果。如果卷积的变量为序列X(n)和Y(n),则卷积的结果F(n)为[15-16]
(6)
雷达信号中同频干扰在原始灰度图像中,表现为纵向的亮线,如图4所示。对同频干扰所在位置的信号作行向量卷积处理后,同频干扰所在的位置,在图像上将表现为平滑处理,在很大程度上降低了同频干扰的强度。可以利用这种同频干扰位置的原始值与行向量处理后的值比对差异,识别同频干扰所在的位置。
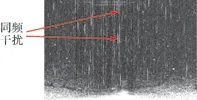
图4 原始灰度图像中的同频干扰特征
采用长度各为7,值相同的列向量和行向量,如式(7),分别对原始图像数据做卷积处理。

(7)
采用行向量对数据进行卷积处理,如图5所示。

图5 卷积处理后的结果
由于原始图像数据同频干扰的位置噪声信号数据强度值与卷积处理后的信号数据强度值对比度较大,将原始数据和行向量卷积处理的数据进行比值运算,得到值比对图像,如图6所示。

图6 值比对图像
应用阈值二值化的方式,锁定同频干扰噪声的位置。采用Otsu算法,锁定阈值为55的灰度级,并以此进行图像的二值化,如图7所示。

图7 二值化图像
对比图3和图8可以得出,Otsu算法分割的图像不仅将同频干扰和其他噪声进行了分割,也将用于溢油识别的海浪回波信号分割出来。如果利用Otsu算法分割的结果直接进行降噪处理,将会对海浪杂波信号进行干扰处理,在降噪的同时降低了溢油目标识别的精度;而先采用卷积运算方法,再采用Otsu算法进行的同频干扰目标识别,并没有将海浪杂波信号进行分割,且明显锁定同频干扰的位置,又没有对用于溢油目标识别的海杂波信号造成影响。因此,本文先采用行向量卷积运算,后采用Otsu算法进行图像分割,锁定同频干扰的位置。
3 同频干扰降噪方法
对二值化图像中得到的噪声所在位置,基于原始数据,采用噪声点横向6个位置的均值运算,公式为
(8)
式中,X表示(n-1,y)位置的灰度级值;f表示均值处理后的(n,y)位置的新值。
均值处理后,结果如图8所示。
4 结果分析
从图8中可以看出,原始图像经过同频干扰噪声识别与降噪后,对绝大部分噪声进行了平滑处理,且未影响图像中海杂波的整体质量,保存了海杂波中可以进行溢油提取的信号内容。但是,图像中还存在亮点噪声、余响噪声及部分较弱的干扰噪声,需要进一步处理。

图8 均值处理后的图像
5 结论与展望
对航海雷达原始灰度图像进行同频干扰以进行降噪处理是非常重要的环节,试验表明:
(1) 由于同频干扰表现为方位角方向的干扰噪声,因此,应在以方位角为横轴方向、以量程回波信号为纵轴方向的平面坐标系统中,处理同频干扰噪声。
(2) 相比直接采用Otsu算法,先利用行列向量的卷积处理对比算法,再采用Otsu算法,更适用于分割航海雷达原始数据中的同频干扰信号。
本文提出了提取航海雷达原始数据中的同频干扰噪声信号方法,并提出采用横向均值的方法,处理同频干扰噪声。但是,基于航海雷达原始数据进行溢油识别以前,还要对其他噪声进行预处理,以保证溢油监测的效率和精度。
[1] WANG D,PAN D,GONG F,et al. An Oil Slick Spectral Experiment of Near Shore Sea Water in the East China Sea[J]. Biomedical Chromatography,2013, 32(11): 34-40.
[2] PEREZ P, FERNANDEZ E, BEIRAS R. Development of Band Ratioing Algorithms and Neural Networks to Detection of Oil Spills Using Landsat ETM+ Data[J]. EURASIP Journal on Advances in Signal Processing,2012, 107(1): 1-8.
[3] DANCHUK S, WILLSON C S. Detection of Oil Spill Frequency and Leak Sources around the Oil Rocks Settlement, Chilov and Pirallahi Islands in the Caspian Sea Using Multi-temporal Envisat Radar Satellite Images 2009-2010[J]. Environ Earth Sci., 2015, 73(7): 3611-3621.
[4] SVEJKOVSKY J,HESS M,MUSKAT J,et al.Characterization of Surface Oil Thickness Distribution Patterns Observed during the Deepwater Horizon (MC-252) Oil Spill with Aerial and Satellite Remote Sensing[J]. Marine Pollution Bulletin,2016, 110(1):162-176.
[5] WEIMIN H, RUBEN C, CHENGXI S, et al. Surface Current Measurements Using X-band Marine Radar with Vertical Polarization[J]. IEEE Transactions on Geoscience and Remote Sensing, 2016, 54(5):2988-2997.
[6] MD S I, HYUNGSEOB H, JAE L, et al. Small Targetd Detection and Noise Reduction in Marine Radar Systems[J]. IERI Procedia, 2013(4): 168-173.
[7] BJRN L, CLARENCE O, COLLINS I, et al. Multi-directional Wave Spectra from Marine X-band Radar[J]. Ocean Dynamics,2016, 66(8): 973-988.
[8] 唐艳红. 基于航海雷达的海浪遥测关键技术研究[D]. 哈尔滨:哈尔滨工程大学, 2010.
[9] SALEH N M. Automated Oil Spill Detection with Ship Borne Radar[C]∥International Institute for Geo-Information Science and Earth Observation.Enschecle:[s.n.],2007.
[10] 索永峰, 杨神化, 陈国权. 基于纹理识别的航海雷达溢油监测系统[J]. 集美大学学报 (自然科学版),2014, 19(2):113-117.
[11] 谭凯,张永军,童心,等. 国产高分辨率遥感卫星影像自动云检测[J]. 测绘学报,2016,45(5):581-591.
[12] 刘立,焦斌亮,刘钦龙. Otsu多阈值算法推广实现[J]. 测绘科学,2009,34(6):240-241.
[13] 李大卫,姜鹏远,王华强,等. 一种基于改进Otsu评价函数的图像分割方法[J]. 测绘科学, 2010,35(1):26-27.
[14] 张光胜,邹友峰,卢小平,等. 基于改进分块阈值的SAR图像分割算法[J]. 测绘通报,2013(12): 28-30.
[15] 许娅娅,张利. 一种用于路面检测数据处理的新方法[J]. 测绘通报,2011(10):8-10.
[16] 万志龙. 一维边缘检测算子的递归算法[J]. 测绘学报,1995,24(2):45-52.
Research on Co-frequency Interference Noise Reduction Processing of Marine Radar Oil Spill Monitoring
XU Jin1,LI Bo2,CUI Can1,LIU Peng1
(1. Navigation College, Dalian Maritime University, Dalian 116026, China;2. Laboratory Department,Liaoning Reconnaissance Institute of Hydrogeology and Engineering Geology,Dalian 116037,China)
The marine radar co-frequency interference noise should be processed in the plane coordinate system. Then the convolution algorithm and Otsu algorithm are used to segment the co-frequency interference noise signal in the original data of marine radar. At last, the method of horizontal mean is used to deal with the co-frequency interference noise. This method can reduce the noise of the co-frequency interference noise and preserve the clutter signal. It provides more accurate basic data for the research of oil spill monitoring technology.
co-frequency interference; marine radar; sea clutter; oil spill monitoring
徐进,李博,崔璨,等.航海雷达溢油监测的同频干扰降噪处理方法研究[J].测绘通报,2017(5):36-38.
10.13474/j.cnki.11-2246.2017.0149.
2016-09-09;
2017-01-18
中央高校基本科研业务费专项(3132016003);辽宁省博士启动基金(201601069)
徐 进(1985—),男,博士,主要从事遥感与地理信息系统研究。E-mail:jinxu@dlmu.edu.cn
李 博。E-mail:libo_2020@126.com
P23
A
0494-0911(2017)05-0036-03
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
科学与信息化(2021年30期)2021-12-24
物联网技术(2020年12期)2021-01-27
雷达与对抗(2020年2期)2020-12-25
火控雷达技术(2020年2期)2020-10-16
海洋通报(2020年2期)2020-09-04
海洋通报(2020年2期)2020-09-04
汽车零部件(2017年4期)2017-07-12
中国水利(2015年4期)2015-02-28
现代防御技术(2014年6期)2014-02-28
