基于模糊PID控制的四旋翼无人机设计
2017-06-10 08:38:55张新英余发军
实验室研究与探索 2017年4期
张新英, 余发军,2, 刘 聪
(1.中原工学院 信息商务学院, 郑州 451191; 2.武汉科技大学 信息科学与工程学院, 武汉 430081)

基于模糊PID控制的四旋翼无人机设计
张新英1, 余发军1,2, 刘 聪1
(1.中原工学院 信息商务学院, 郑州 451191; 2.武汉科技大学 信息科学与工程学院, 武汉 430081)
针对四旋翼飞行器姿态控制中存在强噪声干扰时平稳飞行控制变差的问题,提出了基于自适应模糊PID控制器的四旋翼飞行器快速平稳调节方法。在Matlab中运用该方法对四旋翼飞行器的飞行进行仿真,并与经典PID控制算法的控制结果进行对比。仿真结果表明,模糊 PID 控制器比常规PID 控制器具有更优良的动态性能及鲁棒性。经过多次试验,该硬件设计性能可靠,能满足飞行器一系列稳定飞行的控制要求。
四旋翼无人机; 姿态控制; Matlab仿真; 模糊PID控制
0 引 言
四旋翼飞行器融合了直升机与固定翼飞行器的优点,能在各种复杂地形飞行,具有很高的科研和应用价值[1]。本四旋翼无人机采用4个电机作为动力装置,是一个通过调节电机转速来控制飞行的欠驱动系统。如何进行精确建模和姿态控制是微小型四旋翼无人机研制的关键问题[2]。为了实现四旋翼飞行器的精确飞行,本文利用PID模糊控制算法实现准确稳定控制,经过多次试验,该硬件设计性能可靠,能满足飞行器起飞、悬停、降落等飞行模态的控制要求。
1 四旋翼飞行器总体设计
四旋翼飞行器主要由主控板、呈X交叉的4个电子调速器、无刷电机和桨叶组成[3]。飞行器想要飞行稳定,根据PID模糊控制算法做到空中定高悬停,飞行期间通过MPU6050采集并处理得到的数据,进行姿态调整和航向控制。由于四旋翼飞行器由4路电机带动两对反向螺旋桨来产生推力,故如何保证电机在平稳悬浮或上升状态时转速的一致性及不同动作时各个电机转速的比例关系是飞行器按照期望姿态飞行的关键。
飞行器系统设计框图如图1所示,包含有遥控器接收头、四旋翼主控制器、电子调速器、气压计、电源模块和摄像头模块[4-6]。采用STM32F103C8T6单片机为主控制器单元,系统主控制电路上拥有MPU6050六轴传感器,通过采集其数据来计算出飞行器航姿。接收器接收到控制信号,传输给系统主控制电路,控制电子调速器调整目标航姿,而气压计主要作用是获取到精确的气压数据,从而作为四旋翼飞行器的悬停参考。

图1 系统总体设计框图
1.1 四旋翼飞行器模糊PID控制
四旋翼的姿态子系统方程是一个多输入多输出非线性耦合系统,本系统利用模糊PID控制算法处理姿态数据,并在控制律中进行修正和补偿,将多输入多输出非线性耦合系统转变成相对独立的单输入单输出线性子系统[7-8]。
四旋翼是一个典型的欠驱动的系统,姿态控制为飞行控制的基础和关键所在[8],其姿态子系统方程如下式所示:
(1)
式中:φ为偏航角;θ为俯仰角;Ψ为翻滚角。
将式(1)整理得:
(2)
式中:
(3)
因此得出:
(4)
以偏航通道为例,此处设计的具有自适应能力的模糊PID控制器包含2个输入与3个输出。2个输入分别是偏航角的偏差、偏航角的偏差变化率;3个输出是比例系数、积分系数、微分系数的变化值。因此其逻辑模型如图2所示。

图2 模糊控制逻辑模型图
以偏航角为例,将偏航角的偏差与偏差变化率作为模糊控制的输入变量,ΔKp,ΔKi,ΔKd作为模糊控制的输出变量[11-12],即语言变量分别为e,ecc,ΔKp,ΔKi,ΔKd,假设其论域e:{-3 3},ec:{-3 3},ΔKp:{0 3}, ΔKi:{0 3},ΔKd:{0 3},系统变量用NB,NM,NS,ZO,PS,PM,PB描述,得到系统子集{NB,NM,NS,ZO,PS,PM,PB},变量取三角形隶属函数。然后利用Matlab得输入和输出的隶属函数图,如图3所示。
经过反复测试发现,用模糊控制算法处理姿态数据的效果比采用单纯的PID算法实现更加稳定可靠,但是需要处理的运算增多,使得单片机单位时间内进行姿态矫正的次数减少,从而一定程度上影响了系统的响应速度。模糊控制算法是对手动操作者的手动控制策略、经验的总结。模糊控制算法在系统运行时将从陀螺仪处解算出的姿态数据与数组中的数据对比,查找并映射到相应的隶属区间,然后在隶属的区间处取得最优解进行姿态矫正。
1.2 电源模块
四旋翼飞行器由2 200 MA·h,11.1 V,持续放电倍率30C锂电池供电,通过稳压电路的设计对不同电路进行供电,确保各模块正常稳定的工作。控制系统稳压电路如图4所示[9]。ME6206是高纹波抑制率、低功耗、低压差,具有过流和短路保护的CMOS降压型电压稳压器,适用于四旋翼飞控系统供电。由锂电池提供的电压经ME6206稳压芯片后转为5 V电压,一部分用于飞控板供电;另一部分向预留的外部接口供电。其中电容器的并联使用起到了防止电压抖动与滤波的作用。
1.3 MPU6050实现姿态解算
MPU6050是全球首例6轴运动处理传感器,它集成了3 轴MEMS 陀螺仪,3 轴MEMS加速度计,以及一个可扩展的数字运动处理器(Digital Motion Processor,DMP),可用IIC接口连接一个第三方的数字传感器。使用卡尔曼滤波将得到的数据进行滤波,借助四元数计算得到3个角度,即四旋翼飞行器的俯仰角,横滚角,航向角。利用模糊PID进行误差计算确定当前飞行器的方向[10]。

(a) e

(b) ec
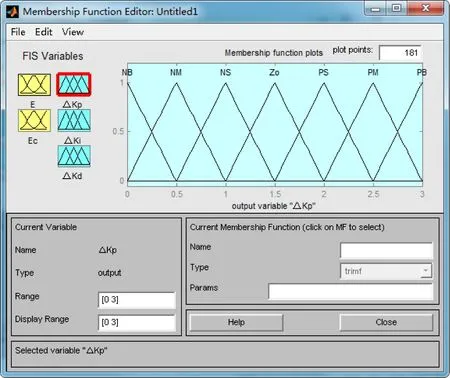
(c) ΔEp

(d) ΔEi
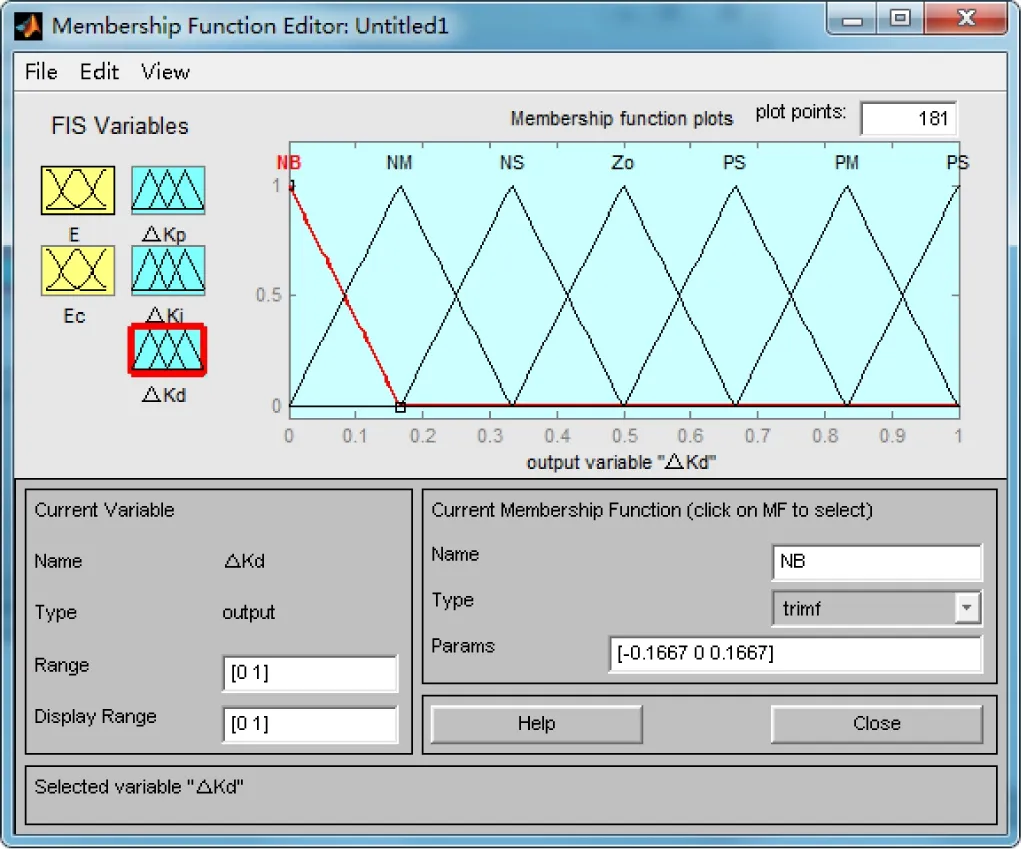
(e) ΔEd

数据融合算法设计是姿态测量系统中重要的环节。在本文的姿态测量系统中,采用互补滤波算法,是将加速度计和电子罗盘分别相对于重力加速度矢量与地磁场矢量的姿态角叠加进由陀螺仪高速积分得到的角增量中,利用翻滚角补偿x轴的角速度,俯仰角补偿y轴的角速度,偏航角补偿z轴的角速度[10-11]。互补滤波器的传递函数为:
一阶低通滤波器
GL(s)=G(s)/[s+G(s)]
(5)
一阶高通

(6)
G(s)=KF/τ

R(s)+GL(s)WH(s)+GH(s)WL(s)≈R(s)
(7)

2 软件设计
主要实现思路为:单片机上电、延时等待电源稳定,减少电源波动对系统的干扰,之后利用定时器设定电机PWM周期、串口初始化,在串口中断服务函数中不断接收AHRS模块发送的数据,且为了数据的有效性设定特定帧头、状态位、结束位和校验位[12-13]。在初始化结束后,设定目标姿态,进入循环函数,不断检测AHRS数据是否接受完成,一旦接收到有效的姿态数据,就进入姿态控制函数。在姿态控制函数内部,利用当前四轴飞行器的Roll(翻滚)和Pitch (俯仰)数据,结合模糊控制算法,解算出不同姿态时,每个空心杯电机需要的调整量控制电机,这样不断地接受姿态数据,解算数据,调整量输出,使四轴飞行器稳定的飞行,软件流程图如图5所示。

图5 程序流程图
3 系统功能测试
3.1 计算机软件仿真
在确定了系统控制的模糊规则后,对整个系统进行了仿真实验[14-15]。选取四旋翼飞行器的偏航姿态角作为仿真控制对象,在阶跃输入条件下的仿真结果如图6所示,正弦输入下,两种控制器的仿真结果如图7所示。

图6 模糊PID控制阶跃响应结果

图7 模糊PID控制正弦响应结果
从以上仿真结果可知,模糊PID控制器系统响应速度快,超调量小,控制精度高,抗干扰能力强,控制效果较好,因此,模糊PID控制器能更好的实现对四旋翼飞行器的控制。
3.2 硬件调试
通过单片机编程,模仿出PWM,并测量是否能通过电机驱动来使飞行器起飞,通过多次测试,找出飞行器起飞时的PWM值。 MPU6050通过串口向单片机发送数据,并在电脑上利用串口接收,检测数据是否正确,通过软件编程针对显示的数据进行修改,使四轴飞行器稳定的起飞,悬停,前进,后退以及降落。室内高清图片和室外飞行状态如图8、9所示。

图8 实验室内高清图

图9 室外飞行状态实物图
4 结 语
本文基于模糊PID控制的四旋翼自主飞行器的研制,利用四元数法进行姿态解算,利用了MPU6050综合陀螺仪、加速度计、磁力计在姿态测量中的优点,为四旋翼完成各种飞行任务提供保证。实验结果表明,模糊PID控制输出畸变小,有较强的抗干扰能力,在动态性能及稳定性上均优于经典PID控制和纯模糊控制。在相对高度空间不变地情况下,飞行器进行姿态角度变换操作,其加权值基本上没有变化,可实现一键式起飞,直行,逆行,高度检测,遇到障碍物可声光报警等功能。
[1] 岳基隆,张庆杰,朱华勇.微小型四旋翼无人机研究进展及关键技术浅析[J].电光与控制,2010, 10(10) :46-52.
[2] 刘辉邦,褚金奎,支 炜,等.基于STM32的无人机姿态测量系统设计[J].传感器与微系统,2013, 32(8):108-110.[3] Mian A A,Wang D B.Modeling and backstepping based nonlinear control strategy for a 6 DOF quad-rotor helicopter[J].Chinese Journal of Aero-nautics,2008, 21(3):261-268.
[4] 张 镭,李 浩.四旋翼飞行器模糊 PID 姿态控制.计算机仿真,2014, 31(8):73-77.
[5] George Limnaios,Nikos Tsourveloudis.Fuzzy logic controller for a mini coaxial indoor helicopter[J].J Intell Robot Syst, 2012(65):187-201.
[6] 张艳红.恶劣环境下无人机双旋翼故障的智能监测系统设计[J].科学技术与工程,2016, 16(17):225-229.
[7] Salih A L,Moghavvemi M.Modelling and PID controller designfor a quadrotor unmannedairvehicle[J].Automation Quality and Testing Robotics(AQTR),IEEE,2010(1):1-5.
[8] 李 俊,李运堂. 四旋翼飞行器的动力学建模及PID控制[J].辽宁工程技术大学学报(自然科学版),2011, 31(1) :114-117.
[9] 王述彦,师 宇,冯忠绪.基于模糊 PID 控制器的控制方法研究[J].机械科学与技术,2011, 30(1):166-172.
[10] 吕印新,肖前贵,胡寿松.基于四元数互补滤波的无人机姿态解算[J].燕山大学学报,2014, 38(2):175-180.
[11] 姚灵灵,贺乃宝,高 倩,等.四旋翼飞行控制系统的模糊PID控制策略研究[J].自动化与仪器仪表,2015(10):71-73.
[12] 万良金.基于多传感器信息融合的机器人姿态测量技术研究[D].北京:北京交通大学,2015.
[13] 窦景欣,孔祥希,闻邦椿.四旋翼无人机模糊自抗扰姿态控制及稳定性分析[J].中国惯性技术学报.2015,23(6):825-830.
[14] 韩 笑,廖粤峰.基于扰动抑制的四旋翼飞行器跟踪控制[J].计算机仿真,2016,33(2):111-115.
[15] 段世华.四旋翼飞行器控制系统的设计和实现[J].电子科技大学学报,2012(4):18-21.
Design of Four-Rotor UAV Based on Fuzzy PID Control
ZHANGXinying1,YUFajun1,2,LIUCong1
(1.College of Information and Business, Zhongyuan University of Technology, Zhengzhou 451191, China; 2. College of Information Science and Engineering, Wuhan University of Science and Technology, Wuhan 430081, China)
When a four-rotor aircraft suffers from strong disturbance, the problem of the stable flight control will happen. To solve the problem, a fast and smooth adjustment method for the four-rotor aircraft is presented based on the adaptive fuzzy PID control. The method is used to simulate the flight of the four-rotor aircraft by Matlab. And the control results are compared with the classical PID control algorithm. The results show that the fuzzy PID controller has better dynamic performance and robustness, compared with the conventional PID controller. After several tests, the hardware design performance is reliable, and can meet the requirements of stable flight control.
four-rotor UAV; attitude control; Matlab simulation; fuzzy PID control
2016-08-20
河南省重点科技攻关项目(152102210155);河南省高等学校重点科研项目(17A413014);中原工学院信息商务学院院级科研项目(ky1615)
张新英(1983-),女,河南郑州人,硕士,讲师,现主要从事多旋翼飞行器的研究。
Tel.:13526623776; E-mail: zxy_teacher@126.com
TP 273
A
1006-7167(2017)04-0056-04
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02 08:24:16
装备制造技术(2021年1期)2021-05-21 07:54:44
军民两用技术与产品(2021年9期)2021-03-09 05:45:28
电子制作(2019年9期)2019-05-30 09:41:48
自动化学报(2018年2期)2018-04-12 05:46:05
北京航空航天大学学报(2016年8期)2016-11-16 01:51:09
西南交通大学学报(2016年3期)2016-06-15 20:29:35
电子制作(2016年21期)2016-05-17 03:53:01
通信电源技术(2016年4期)2016-04-04 02:57:36
通信电源技术(2016年5期)2016-03-22 01:09:57