PSO-BP-PID算法在双容水箱系统中的应用
2017-06-05 14:58:00杨华伟帕孜来马合木提张毅
电气传动 2017年5期
杨华伟,帕孜来·马合木提,张毅
(1.新疆大学电气工程学院,新疆 乌鲁木齐 830047;2.国家电网吐鲁番供电公司,新疆 吐鲁番 838000)
PSO-BP-PID算法在双容水箱系统中的应用
杨华伟1,帕孜来·马合木提1,张毅2
(1.新疆大学电气工程学院,新疆 乌鲁木齐 830047;2.国家电网吐鲁番供电公司,新疆 吐鲁番 838000)
针对工业中对液位控制的要求,利用实验室现有仪器与设备,设计了双容水箱控制系统。以研华工控机与EFAT/P过程实验装置为平台,分别从硬件与软件2部分详述了控制系统的实现。通过软件编程的方法实现了控制算法的设计,利用MCGS组态软件建立了实时监控画面,完成了实际控制系统的搭建,分析比较了传统PID和PSO-BP-PID算法控制效果的优劣。为液位控制系统的研究提供了一个良好的平台。
双容水箱;液位控制;PSO-BP-PID算法;传统PID算法;精准控制
在实际工业现场,诸如化工生产、溶液过滤、饮料加工及化妆品制造等复杂的液位系统中,常规PID控制方法控制效果欠佳,导致产品质量不达标,严重影响了企业的经济效益及国民的生产生活。基于解决双容液位精准控制问题的迫切性与必要性,提出设计PSO-BP-PID控制器[1]来完成双容水箱液位系统精准控制的控制策略。首先将常规PID控制器应用于双容水箱液位系统中,然后将PSO-BP-PID控制器应用于双容水箱液位控制中,最后比较二者的控制效果,从而选出更适合于复杂液位控制现场的控制器策略。
1 PID控制算法应用
通过临界比例度法[2]对控制系统PID参数值进行调整,即AI仪表[3-4]的P,I,D参数可得常规PID算法下的双容水箱液位控制曲线如图1所示,放大图图2所示。
由图2可知,系统的设定值SV=140 mm时,最大波动值max=139 mm,最小波动值min=135 mm。设定值为SV=160 mm时,最大波动值max= 162 mm,最小波动值为min=157 mm,调节时间ts=360 s。
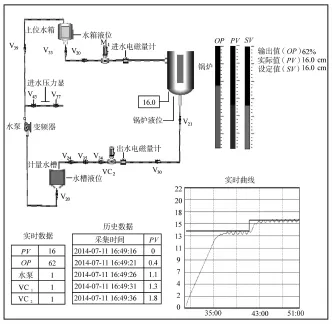
图1 常规PID算法运行效果图Fig.1 Operation graph of conventional PID algorithm

图2 常规PID算法运行效果放大图Fig.2 Amplified operation graph of conventional PID algorithm
2 PSO-BP-PID控制算法的应用
PSO-BP-PID算法[5-6]在双容水箱系统中主要包括硬件设计与软件设计2部分。系统硬件部分包括变频器、三相水泵、AI仪表和ADAM5000E数据采集模块,其主要设计工作在于完成现场液位信息的实时采集和传送。软件部分包括有MCGS,Matlab和Visual Basic(VB),其设计工作在于完成MCGS的高级开发[7],即利用MCGS组态软件的可扩充性,使MCGS能够调用由VB生成的PSO-BP-PID算法控件的过程,目的是将PSO-BP-PID算法应用于MCGS组态软件中去。并最终通过这两部分的结合达到双容水箱系统液位的精准控制。
2.1 硬件设计部分
PSO-BP-PID控制算法的双容水箱系统其控制器是Matlab中经PSO优化的BP神经网络PID算法[8]。因此控制过程中的参数需要进行实时地采集和传送给工控机,以便使控制算法中的数据实时更新,从而训练求得合适的PID控制量,作用于执行机构,以达到满意的控制效果。此数据采集和传送工作由ADAM-5017和ADAM-5024模块共同来完成。整个系统电气接线图如图3所示。
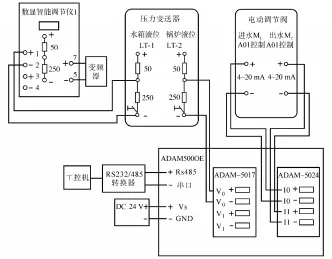
图3 电气接线图Fig.3 Electric wiring diagram
按照图3把过程信号分别与智能仪表和ADAM5000E连接。其中,智能调节仪1连接高位水箱,目的是为高位水箱设定液位给定值。同时,参照变频器接线图[3],把与变频器相连的智能调节仪1的输出与交流变频器实验板的AD输入端子连接。为了对锅炉液位实际值进行实时采集,将锅炉液位信号连接至ADAM-5017模拟量输入模块的通道1;同时,为了控制锅炉液位值为一定高度,将进出水电动调节阀分别连接ADAM-5024模拟量输出模块的通道1和2。
正确连接所使用的仪表、智能模块与设备电源线后,整个系统的控制过程为:由压力变送器检测到的锅炉液位的4~20 mA信号送入ADAM-5017模拟量输入模块,经A/D转换后传入到工控机,工控机经内部PSO-BP-PID算法得出最终的PID控制量,此量经ADAM-5024模拟量输出模块输出,以完成对执行器出水电动调节阀开度的控制,最终使液位保持在设定的高度。
2.2 软件设计部分
硬件连接完成后,在MCGS中分别添加ADAM-5017和ADAM-5024模块,并分别设置其最小采集周期、母版地址与母板槽号,然后对其添加通讯状态和测量值。在接通DC 24 V电源的情况下,打开ADAM-4000 5000-UTILITY软件[9]对ADAM5000E模块进行配置与测试。最后按照“MCGS高级开发向导指南”在MCGS中完成用户功能构件“PSO-BP整定PID”的编制、调试和挂接工作[10-11]。至此,整个软件设计部分完成。
2.3 PSO-BP-PID算法运行结果
硬件和软件设计工作分别完成后,打开“双容水箱液位系统”组态画面,点击运行,系统调用“PSO-BP-PID”策略构件后,基于PSO-BP-PID算法的系统运行效果如图4所示,放大图如图5所示。

图4 PSO-BP-PID算法运行效果图Fig.4 Operation graph of conventional PSO-BP-PID algorithm

图5 PSO-BP-PID算法运行效果放大图Fig.5 Amplified operation graph of conventional PSO-BP-PID algorithm
由图5可知,当设定值SV=140 mm时,液位最大波动max=141 mm,最小波动min=138 mm;当设定值SV=160 mm时,液位最大波动max=161 mm,液位最小波动min=158 mm,调节时间ts=300 s。
3 实验结果及结论
比较常规PID算法在双容水箱系统中的运行结果与PSO-BP-PID算法在双容水箱系统中的运行结果,汇总结果如表1所示。

表1 实验结果汇总表Tab.1 Summary table of experimental results
由表1可知,双容水箱系统在常规PID算法下的稳态波动范围为4~5 mm,调节时间为360 s,而在PSO-BP-PID控制算法下,双容水箱系统的稳态波动范围只有3 mm,调节时间降低为300 s。
可见,对于双容水箱液位定值控制系统来说,PSO-BP-PID算法无论是在控制精度还是在系统调节时间控制上都优于常规PID算法。为实验室模拟复杂工业现场水箱的液位精准控制问题提供了一定的应用参考价值。
[1]胡应占,赵德申,刘志刚,等.基于BP神经网络整定PID智能调速控制系统研究[J].电气开关,2007(4):37-39,42.
[2]何芝强.PID控制器参数整定方法及其应用研究[D].杭州:浙江大学,2005.
[3]THJ-2型过程控制实验指导书[M].杭州:浙江天煌实业有限公司,2008.
[4]降爱琴,郝秀芳.自动控制原理及系统实验实训教程[M].北京:中国电力出版社,2009.
[5]韩月娇.粒子群算法的改进及其在BP神经网络中的应用[D].南昌:南昌航空大学,2012.
[6]乔茂伟,韦永斌.基于PSO的神经网络PID在液位控制中的应用[J].自动化与仪表,2012,27(9):43-47.
[7]北京昆仑通泰自动化软件科技有限公司.MCGS高级开发指南[Z].
[8]郑雁.高级神经网络算法在计算机监控系统中的研究与应用[D].曲阜:曲阜师范大学,2008.
[9]研华科技股份有限公司.ADAM4000-5000快速入门手册[Z].
[10]孙亚灿.基于MATLAB与MCGS的先进控制算法在工业过程中的研究应用[D].曲阜:曲阜师范大学,2007.
[11]郑雁.高级神经网络算法在计算机监控系统中的研究与应用[D].曲阜:曲阜师范大学,2008.
Application of PSO-BP-PID Algorithm in Double Tank Water System
YANG Huawei1,PAZILAI·Mahemuti1,ZHANG Yi2
(1.College of Electrical Engineering,Xinjiang University,Urumqi 830047,Xinjiang,China;2.Turpan Power Supply Company of the State Grid,Turpan 838000,Xinjiang,China)
According to the requirement of liqued level control in industry,the double-tank level control system was designed,which used the existing instruments and equipment.Yanhua industrial controlling computer and EFAT/P process experimental system were choosed as platform,illustrated the reality of control system with software and hardware.The design of control algorithm was realized through the programming,using the MCGS configuration software,established the real-time monitoring,accomplished the practical of control system,analyzed and compared the result of traditional PID and PSO-BP-PID algorithm.It can provide a good platform for the research of liquid level control system.
double tank water;liquid level control;PSO-BP-PID algorithm;traditional PID algorithm;precise control
TP272
B
10.19457/j.1001-2095.20170518
2016-04-13
修改稿日期:2016-11-20
杨华伟(1990-),男,硕士研究生,Email:1214082943@qq.com
猜你喜欢
测控技术(2018年9期)2018-11-25 07:45:00
石油化工自动化(2018年5期)2018-11-14 02:34:30
制造技术与机床(2017年6期)2018-01-19 02:41:07
电子制作(2017年19期)2017-02-02 07:08:50
工业设计(2016年11期)2016-04-16 02:49:22
小雪花·成长指南(2015年10期)2015-10-23 08:37:37
电源技术(2015年9期)2015-06-05 09:36:06
汽车维护与修理(2015年2期)2015-02-28 12:15:41
机电信息(2015年3期)2015-02-27 15:54:44
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54