
永磁同步电机改进占空比模型预测转矩控制方法
2017-06-05 14:58徐艳平周钦雷亚洲张保程李园园
电气传动 2017年5期
徐艳平,周钦,雷亚洲,2,张保程,李园园
(1.西安理工大学电气工程系,陕西 西安 710048;2.日立永济电气设备(西安)有限公司,陕西 西安 710016)
永磁同步电机改进占空比模型预测转矩控制方法
徐艳平1,周钦1,雷亚洲1,2,张保程1,李园园1
(1.西安理工大学电气工程系,陕西 西安 710048;2.日立永济电气设备(西安)有限公司,陕西 西安 710016)
针对永磁同步电机(PMSM)传统模型预测转矩控制(MPTC)存在转矩和磁链脉动较大的问题,提出了一种对占空比和电压矢量同时优化的模型预测转矩控制方法。该方法针对每一种电压矢量预先计算出使得下一时刻转矩和磁链误差最小的占空比,再通过价值函数同时选取出电压矢量和占空比的组合,并且在占空比计算过程中考虑了对转矩和磁链脉动的同时抑制。实验结果表明,所提出的控制方法能够较好地抑制转矩和磁链脉动。
永磁同步电机(PMSM);模型预测转矩控制(MPTC);占空比控制;转矩脉动
模型预测转矩控制(MPTC)是模型预测控制策略在直接转矩控制(DTC)中的应用[1],该策略通过枚举的方法对逆变器所有电压矢量作用后产生的转矩和磁链进行预测评估,通过价值函数直接选取出与给定转矩和磁链误差值最小的电压矢量作用于逆变器,因此具有与直接转矩控制相同迅速的转矩响应性能。文献[2]将MPTC和传统DTC方法进行了对比,通过实验证明了模型预测转矩控制具有更好的稳态性能。模型预测控制由于其价值函数的自定义性,可以在价值函数中增加更多的约束条件,例如最大转矩电流比[3-4]、开关频率等。
针对系统稳态性能的改进,国内外学者提出了许多改进算法[5-7]。文献[5]通过采用多拍预测以提高系统稳态性能。文献[6]采用分辨率的思想,将电压矢量分为N个(N为分辨率,取12~16),然后采用有限控制集模型预测控制分别对局部的电压幅值和相位进行遍历,分别获得局部最优电压幅值和相位,再经由空间矢量脉宽调制模块调制输出。文献[7]在1个采样周期里通过价值函数选择2个有效的电压矢量,并且通过转矩脉动最小原则计算2个电压矢量的切换时间,实验结果表明该方法可以减小磁链和转矩脉动。文献[5-7]提出的方法都使得计算量大幅增加,不利于提高系统采样频率。
占空比控制方法是将1个采样周期分成2部分:一部分时间作用有效电压矢量;另一部分作用零电压矢量。改变占空比,可以等效为调节有效电压矢量的幅值,因此可以减小转矩和磁链脉动。文献[8]在异步电机模型预测控制策略中先选出使得价值函数最小的有效电压矢量,采用离散占空比值,再次通过模型预测方法选出最优的占空比以减小转矩脉动。但是该方法计算量较大,且获得的占空比不是连续的。为了获得连续占空比,常用的占空比计算方法有转矩无差拍控制[9]、平均转矩控制[10]和转矩脉动最小控制[11]。文献[12]针对异步电机模型预测转矩控制,提出了一种模型预测转矩控制占空比控制方法。以上几种占空比计算方法中均只考虑了对转矩的控制,忽略了磁链。
本文针对永磁同步电机提出了一种对电压矢量和占空比同时进行优化的改进占空比模型预测转矩控制方法。该方法中,针对每一个电压矢量先计算使得转矩和磁链与其给定值最小的占空比,再通过价值函数优化出最优的电压矢量和占空比的组合。最后,实验结果证明了所提出的占空比和电压矢量同时优化的改进占空比MPTC方法的可行性和有效性。
1 永磁同步电机数学模型
在两相静止坐标系下,永磁同步电机的数学模型为
式中:is为定子电流;Ls为定子电感;us为定子电压;Rs为定子电阻;ωre为电机转子的电角速度;Ψs为定子磁链。
永磁同步电机的转矩方程为

式中:Te为电磁转矩;p为电机的极对数。
2 改进占空比模型预测转矩控制
2.1 传统模型预测转矩控制
模型预测转矩控制将电机的电磁转矩和定子磁链作为控制目标,根据电机当前状态,分别预测每个电压矢量作用后在下一时刻产生的转矩和磁链,并且通过价值函数选取使得与给定转矩和磁链最接近的电压矢量作用于逆变器。
采用一阶欧拉公式将式(1)、式(2)离散化,可以得到下一时刻的电流和磁链预测方程为
式中:is(k+1),Ψs(k+1)分别为预测的下一时刻的定子电流和磁链;is(k),Ψs(k)分别为当前时刻的定子电流和磁链;ωre(k)为当前时刻转子的电角速度;Ts为采样周期。
将式(4)和式(5)带入式(3),进而可以预测下一时刻的电磁转矩如下式:

式中:Te(k+1)为下一时刻的转矩预测值。
模型预测转矩控制方法的基本思想是令下一时刻磁链和转矩与给定值的误差最小,因此可选取价值函数为

在两电平逆变器中,共有7种电压矢量,由式(4)~式(7)可分别预测出每一种电压矢量对应的价值函数值,通过比较选择使得价值函数值最小的电压矢量作为最优电压矢量作用于逆变器。
2.2 改进占空比模型预测转矩控制
在两电平逆变器控制的传统模型预测转矩控制中,由于可选的电压矢量数目有限,使得选择的电压矢量作用后的转矩和磁链不一定恰好达到给定值,因此产生了较明显的转矩和磁链脉动。本文结合占空比方法,提出了一种对电压矢量和占空比同时优化的模型预测转矩控制方法,并且在计算占空比的过程中,同时考虑了对转矩和磁链的控制。
文献[13]深入分析了转矩和磁链在1个采样周期内的增量与电压矢量幅值的关系,从中得到的转矩和磁链增量表达式为

式中:θuψ为定子电压与定子磁链间的夹角;Ld为d轴电感;Lq为q轴电感;Ψf为转子磁链;δ为负载角。
由式(8)和式(9)可以看出,当采样周期不变时,磁链和转矩的在1个采样周期内的变化量可以通过控制电压矢量us的幅值来调节。因此结合占空比思想,可通过改变us的幅值减小磁链和转矩脉动。
从上述分析可知,当1个采样周期内作用电压矢量us时,产生的磁链和转矩增量分别为ΔΨs和ΔTe。当采用占空比控制时,若占空比为γ,则1个采样周期内作用的电压矢量为γus,产生的磁链和转矩值增量分别为γΔΨs和γΔTe。下一采样时刻的磁链幅值和转矩可以由下式预测得到:

将式(10)和式(11)带入价值函数表达式(7),得到使得价值函数值最小的占空比为

其中,占空比γ的取值范围为[0,1]。特别地,当电压矢量us为零电压矢量时,占空比γ=1。
根据式(12)可先对每一个电压矢量计算出相应的占空比γ,再将电压矢量及其占空比组合代入模型预测方程,电流和磁链的预测方程根据式(4)和式(5)可写为
将式(13)、式(14)带入转矩预测公式(6)可计算出每个电压矢量ui和占空比γi组合作用后的下一时刻的转矩,并根据式(7)计算每个电压矢量对应的价值函数,使得价值函数最小的电压矢量uop和占空比γop组合即为最优电压矢量及其占空比组合。
永磁同步电机改进占空比模型预测转矩控制系统框图如图1所示。

图1 PMSM改进占空比MPTC系统框图Fig.1 Control black diagram of improved duty cycle MPTC for PMSM
3 实验结果及分析
为了验证所提出的永磁同步电机占空比和电压矢量同时优化的模型预测转矩控制方法的优点,在以TMS320F28335数字信号处理器(DSP)为控制芯片的两电平逆变器实验平台上对该方法进行了实验研究。为了更好地说明该控制策略的有效性,将文献[12]中异步电机占空比模型预测转矩控制方法应用到永磁同步电机(简称为占空比MPTC),针对同一台永磁同步电机,将传统MPTC、占空比MPTC和本文提出的改进占空比MPTC方法进行了实验对比。实验中3种方法的采样频率均为10 kHz,实验中永磁同步电机参数为:永磁体磁链0.24 Wb,定子电感8.5 mH,额定电压200 V,额定电流9.4 A,定子电阻0.2 Ω,额定转速2 000 r/min,极对数4,转子惯量0.001 2 kg·m2。
图2分别为采用传统MPTC、占空比MPTC和改进占空比MPTC 3种方法下电机空载启动时的转速和转矩实验波形。从图2中可以看出,当电机启动至1 000 r/min时,传统MPTC、占空比MPTC和改进占空比MPTC到达给定转速的时间均约为0.08 s,这表明本文提出的改进占空比MPTC具有和传统MPTC、占空比MPTC相同快速的转速响应性能。
图3为传统MPTC、占空比MPTC和改进占空比MPTC 3种方法下电机空载稳定运行于1 000 r/min,突加3 N·m负载时的转速和转矩实验波形。从图3可以看出,电机突加负载后,3种控制方法的转矩响应时间均约为0.1 s,并且电机能稳定带载运行,这表明本文提出的改进占空比MPTC具有和传统MPTC、占空比MPTC同样快速的转矩响应性能和抗扰性能。
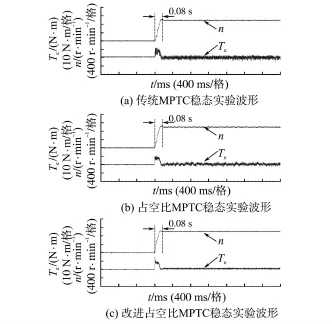
图2 传统MPTC、占空比MPTC和改进占空比MPTC启动实验波形Fig.2 Experiment results of triditional MPTC,duty cycle MPTC and improved duty cycle MPTC at start-up
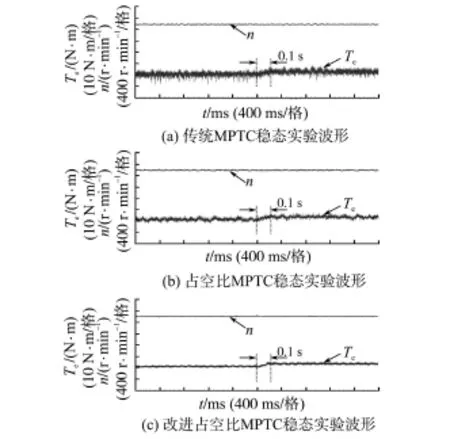
图3 传统MPTC、占空比MPTC和改进占空比MPTC突加负载实验波形Fig.3 Experiment results of triditional MPTC,duty cycle MPTC and improved duty cycle MPTC at torque changed
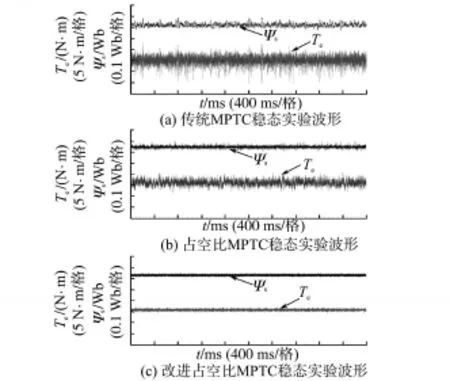
图4 传统MPTC、占空比MPTC和改进占空比MPTC在1 000 r/min时稳态波形Fig.4 ExperimentresultsoftriditionalMPTC,dutycycleMPTCand improved duty cycle MPTC at 1 000 r/min for steady-state

表1 3种控制方法1 000 r/min时转矩和磁链脉动Tab.1 Torque and flux linkage ripples of three control methods at 1 000 r/min
在传统MPTC中,只有6个有效电压矢量可供选择,因此存在明显的转矩和磁链脉动。在占空比MPTC和改进占空比MPTC中,在每个采样周期内添加了零电压矢量,相当于改变有效电压矢量幅值,即有6个固定方向上幅值可变的电压矢量可供选择,所以可以减小转矩和磁链脉动。在占空比MPTC方法中,先利用价值函数选择有效电压矢量,再计算该有效电压矢量对应的占空比,不能保证电压矢量和占空比的组合为全局最优组合,并且占空比计算过程中只考虑了转矩控制,忽略了磁链。而在改进的占空比MPTC中,先针对每个电压矢量都计算出使得转矩和磁链脉动最小占空比,再选取使得价值函数最小的电压矢量及其占空比的组合,从而保证最终选择的是全局最优的电压矢量,并且占空比计算中考虑了对转矩和磁链脉动同时抑制,因此相比占空比MPTC控制方法,本文提出的改进占空比MPTC方法进一步减小了转矩和磁链脉动。
4 结论
本文针对永磁同步电机提出了一种对占空比和电压矢量同时优化的模型预测转矩控制方法,通过占空比实时调节电压矢量的幅值以减小转矩和磁链脉动。实验结果证明了所提出的占空比和电压矢量同时优化的MPTC控制方法对磁链和转矩脉动具有明显的抑制效果,能够提高控制系统的稳态性能,同时具有和传统MPTC同样出色的动态性能。
[1]Geyer T,Beccuti G A,Papafotiou G,et al.Model Predictive Direct Torque Control of Permanent Magnet Synchronous Motors[C]//Energy Conversion Congress and Exposition(ECCE),2010:199-206.
[2]雷亚洲,徐艳平,周钦.基于改进模型预测控制的永磁同步电机DTC方法[J].电气传动,2015,45(9):3-6,19.
[3]闭业宾,罗显光,阮灵通,等.永磁同步电机MTPA预测控制方法研究[J].计算机工程与应用,2014,50(11):256-260.
[4]Preindl M,Bolognani S.Model Predictive Direct Torque Control with Finite Control Set for PMSM Drive Systems,Part 1: Maximum Torque Per Ampere Operation[J].Industrial Informatics,IEEE Transactions on,2013,9(4):1912-1921.
[5]Hu Hongming,Zhu J,Guo Youguang.Model Predictive Control of Permanent Magnet Synchronous Machine with Reduced Torque Ripple[C]//International Conference on Electrical Machines and Systems(ICEMS),2013:1478-1482.
[6]MA Zhixun,Kennel S R.Continuous Set Nonlinear Model Predictive Control for PMSM Drives[C]//Power Electronics and Applications,2013:1-10.
[7]Landsmann P,Stolze P,Kennel R.Optimal Switching Time Calculation in Predictive Torque Control[C]//Power Electronics and ECCE Asia,2011:923-930.
[8]Habibullah M,Lu DC.Model Predictive Duty Based Torque and Flux Ripples Minimization Of Induction Motor Drive[C]// Power Electronics,Machines and Drives,2014:1-6.
[9]Kenny B,Lorenz R.Stator and Rotor-flux-based Deadbeat Direct Torque Control of Induction Machines[J].Industry Applications,IEEE Transactions on,2003,39(4):1093-1101.
[10]Flach E,Hoffmann R,Mutschler P.Direct Mean Torque Control of an Induction Motor[C]//Proceedings European Power Electronics and Applications(EPE),1997:672-677.
[11]Shyu K-K,Lin J-K,Pham V-T,et al.Global Minimum Torque Ripple Design for Direct Torque Control of Induction Motor Drives[J].Industrial Electronics,IEEE Transactions on,2010,57(9):3148-3156.
[12]Zhang Yongchang,Yang Haitao.Torque Ripple Reduction of Model Predictive Torque Control of Induction Motor Drives[C]//Energy Conversion Congress and Exposition(ECCE),2013:1176-1183.
[13]徐艳平,钟艳儒.基于占空比控制的永磁同步电机新型直接转矩控制策略[J].电工技术学报,2009,24(10):27-32.
Improved Duty Cycle Model Predictive Torque Control Method of Permanent Magnet Synchronous Motor
XU Yanping1,ZHOU Qin1,LEI Yazhou1,2,ZHANG Baocheng1,2,LI Yuanyuan1
(1.Department of Electrical Engineering,Xi’an University of Technology,Xi’an 710048,Shaanxi,China;2.Hitachi Yonge Electric Equipment(Xi’an)Co.,Ltd.,Xi’an 710016,Shaanxi,China)
To solve the problem of larage torque and flux linkage ripples in traditional model predictive torque control(MPTC)for permanent magnet synchronous motor(PMSM),an improved duty cycle MPTC method was proposed which selected voltage and duty cycle simultaneously.In this method,each voltage vector′s duty cycle was calculated which made errors of torque and flux linkage minimum at the next sampling instant,and then the optimal combination of the voltage vector and its duty cycle would be selected by a cost function,and torque and flux linkage were considered simultaneously in the process of calculating duty cycle.Experimental results show that the proposed method can effectively reduce torque and flux linkage ripples.
permanent magnet synchronous motor(PMSM);model predictive torque control(MPTC);duty cycle control;torque ripples
TM351
A
10.19457/j.1001-2095.20170504
2016-05-10
修改稿日期:2016-09-24
徐艳平(1977-)女,博士,副教授,Email:xuyp@xaut.edu.cn
猜你喜欢
中国特种设备安全(2022年3期)2022-07-08
防爆电机(2020年6期)2020-12-14
光学精密工程(2016年3期)2016-11-07
电测与仪表(2016年10期)2016-04-12
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
舰船科学技术(2015年8期)2015-02-27
大电机技术(2015年5期)2015-02-27
电测与仪表(2014年23期)2014-04-04
电测与仪表(2014年11期)2014-04-04
组合机床与自动化加工技术(2014年12期)2014-03-01
