
通用航空北斗星基位置感知控制技术
2017-06-05 15:01王振华张兴俭刘云峰
无线电工程 2017年6期
王振华,张兴俭,刘云峰
(1.卫星导航系统与装备技术国家重点实验室,河北 石家庄 050081;2.中国民航大学民航空管研究院,天津 300000;3.中国飞龙通用航空有限公司,黑龙江 哈尔滨 150060)
通用航空北斗星基位置感知控制技术
王振华1,张兴俭2,刘云峰3
(1.卫星导航系统与装备技术国家重点实验室,河北 石家庄 050081;2.中国民航大学民航空管研究院,天津 300000;3.中国飞龙通用航空有限公司,黑龙江 哈尔滨 150060)
低空逐步开放导致飞行冲突增多以及管制难度加大。针对通用航空存在的监管难的问题,提出了利用北斗星基通信(RDSS)和卫星无源导航(RNSS)一体化技术,解决了低空的协同监视以及控制问题。设计并研制了基于北斗的地面指挥控制系统、通航服务站系统以及机载接收设备,并在中国东北地区和西北地区展开机载设备搭飞测试验证示范,测试结果表明,北斗RDSS/RNSS位置感知技术非常适用于通用航空低空协作目标的监视。与传统的地面一次二次雷达以及地基ADS-B监视技术相比,北斗星基监视与控制技术是利用我国现有自主的PNT资源,开展的航空行业应用,具有成本低、监控空域更广泛的优势。
通用航空;协同监视;北斗;雷达;ADS-B;定位导航授时
0 引言
通用航空具体是指民用航空飞行器从事农业、林业、渔业、医疗卫生、抢险救灾、气象探测、海洋监测、科学实验、教育训练和文化体育等方面的飞行业务的统称[1-2]。一般来讲通用飞机数量是一个国家经济实力的体现,全美通航飞行器数量达到了20万架,目前我国正处在通航发展的上升期,企业或者个人拥有和使用通航飞行器的比例也在大幅度提高[3-4]。同时因为通航发展快、并且随着飞机性能的不断提高,航行安全成为国家和民众关注的热点,航空监视技术作为新航行系统(CNS/ATM)的核心技术逐渐体现[5-6]。
飞行繁忙地区同时运行公共航空和通用航空,导致飞行冲突增多和飞行管制指挥难度加大;由于制度的不完善,在飞机监管上存在一定漏洞出现“黑飞”,带来空防压力[7];由于飞机机载设备性能各异、没有统一的通用航空服务机构,通用航空飞行员很难获取必要的飞行数据和飞行服务信息,存在飞行安全隐患。基于北斗星基位置感知控制技术,可有效解决上述问题,通过通用航空器与地面指挥终端的星基短报文通信,地面指挥中心可适时获知航空器用户的状态信息,也可通过双向的报文通信,为航空器提供服务信息;另外,提出了一种基于标准航空CPDLC空中管制指令的双向协议,航空器用户与地面用户可通过双向CPDLC管控指令,完成快捷的管制指令下达。
1 通航监视现状分析
国内通用航空运行种类繁多,执行标准不统一,而且飞机种类、数量分布地域性强,难以统一综合管理。通航飞行单元飞行高度低、数量大、密度高且种类多,要求对通航飞行器的监视能力必须具备范围广、精度高的特点[8]。主动式的地面一次雷达系统(PSR)是目前军航使用的空域监视手段,而民航和通航更多地是使用应答式的二次雷达系统(SSR)[9-10],或非主动式的自相关监视广播系统(ADS-B)[11]。
1.1 空管一次雷达优缺点分析
空管一次雷达是通过接收航空器对该雷达自主发射的询问电磁波的反射波,经检测处理从而对航空器进行定位的雷达系统。空管一次雷达包括远程一次雷达、近程一次雷达和场面监视雷达等。其主要优点:独立非协同式监视[12];对机载设备没有任何要求;可对不具备机载应答机功能的航空器实现监视;各地面站可独立运行[13]。缺点:仅有目标距离和方位信息;无航空器识别能力;覆盖范围小(100 km);建设和运行维护成本高;地面站建设受地形限制。主要应用于航路(线)、终端(进近)管制区域和机场场面监视[14]。
1.2 空管二次雷达优缺点分析
通过该雷达发射询问信号,空中机载应答机接收到该询问信号并发射一个回答信号,从而实现航空器定位的雷达系统。空管二次雷达主要使用A/C 模式二次雷达和S模式二次雷达等。主要优点:独立协同式监视;应用航空器应答机发射的应答信号,不需要额外的机载设备;覆盖范围广;可提供比空管一次监视雷达更多的监视目标信息;各地面站可独立运行。缺点:建设和运行维护成本高;更新率低;地面站建设受地形限制。主要应用于航路(线)和终端(进近)管制区域监视,电扫描空管二次监视雷达可应用于平行跑道监视[15]。
1.3 广播式自动相关监视ADS-B优缺点分析
ADS-B基于全球卫星定位系统(GNSS),以空—地、空—空数据链为通信手段,将机载导航系统和飞行器状态信息通过设备对广播[16-17],同时也能够接收其他航空器的广播信息,从而实现航空器间状态信息的互相感知,达到了解周边空域的详细交通状况[18]。主要优点:地面设施部署比较快捷;在无雷达覆盖的区域,可以为在无雷达覆盖区域提供机场场面监视;地面ATC系统可获取航空器的高度、速度、识别信息和计划飞行路径等信息。缺点:覆盖范围小(200 km);机载设备以及地面设备维护成本较高。
1.4 新型监视技术的必要性
3种监管方式均有各自的优缺点,优点在于:三者均为目前已经成熟的常态化技术,经过了多年的飞行验证,表征其运行的稳定性与可靠性;在管制空域和报告空域、特别是在进近区,能够达到地面的监视要求的高实时性,雷达和ADS-B均可做到1~4 s的刷新率。但同时,这几种传统监视手段也有先天的局限性:① 3种方式的空域覆盖范围不足,均属于100~250 km的区域监视,且偏远地区无覆盖;② 飞机的计划航线、速度等态势数据难以通过雷达直接获得;③ 雷达和ADS-B建站成本高昂,与廉价通用航空建设投资不符。因此,提出基于北斗RDSS/RNSS定位通讯技术的通用航空北斗星基位置感知技术,与传统的雷达和ADS-B监视技术互为补充,完善了我国低空空域的监视体系建设。
2 基于北斗的自相关监视技术
利用北斗RNSS B1/L1定位和RDSS报文通信一体化能力,以及低空地面移动蜂窝网络的密集覆盖,使用固定的转发协议将北斗RNSS定位结果通过RDSS卫星链路或者地面移动蜂窝网络链路发送至地面指挥控制中心,地面指挥控制中心可通过协议约定内容对通航飞行器以及无人机进行控制及业务服务。从而实现地面调度系统实时监控所辖飞行器的某时刻所处的位置、速度、航向、航空器识别码和工况状态等信息;实现空地双向普通语音及文字报文通信;实现基于航空CPDLC空管指令集的管制报文通信。该技术所实现的途径是航空器自相关监视广播系统(ADS-B)的升级版本,将机载自身的无线广播链路升级为基于星基通信和地面移动蜂窝网络链路,从根本上改进了传统ADS-B技术覆盖范围小、成本高的问题。
2.1 系统组成
通用航空监视网以及综合服务网的系统设备,包括空中用户、地面用户、北斗通航地面服务站和多数据源管理部门,北斗指挥系统集北斗通信定位监视技术与地面移动蜂窝网监视技术于一体,主要完成数据的收集与预处理,形成可与通航服务站交互使用的数据格式;通航服务站系统负责提供Web前端网络服务,以及后台数据和引入外部数据的服务。北斗星基自相关监视技术总体框图如图1所示。

图1 北斗星基自相关监视技术总体框图
2.1.1 硬件构成
基于北斗的自相关监视系统硬件构成包括两大部分:通航机载协同监视终端和北斗通航地面服务站系统。
机载协同监视终端主要由电源模块、信息处理模块、RDSS模块、RNSS模块、移动网通讯模块、音频处理模块和接口模块等组成。
电源采用宽压入,由2片电源芯片进行过欠压保护,再由1片电源芯片完成宽压转5 V的工作;信处模块采用飞思卡尔的IMAX6Q核心模组,该模组使用ARM新架构的Cortex A9核心,4核心最高运行频率可达1.2 GHz,具有ARMv7TM、Neon、VFPV3 和Trustzone;RDSS和RNSS模块以及移动通讯模块分别采用国产模块来搭建接收终端。机载部分组成如图2所示。

图2 机载部分组成
北斗通航地面服务站系统由北斗指挥系统和通航服务站系统组成,如图3所示。北斗指挥监视系统结合使用我国独有的北斗地面指挥用户机技术以及移动网络通信终端技术,作为感知层的关键组成部分,用来感知和接收飞行器用户上报或者发送的位置信息、工况信息及其他的双向报文通信信息,通过软硬件接口将信息交给通航服务站系统数据后台。
通航服务站系统为通用航空服务业务的提供主体,主要利用数据后台服务技术和安全网络通信技术,借助Web的前端为空中用户或者地面用户提供通用航空航路情报、气象和飞行计划等数据情报服务;另外也可以借助移动网络通信终端为个人用户提供情报数据推送服务。

图3 北斗通航地面服务站系统组成
2.1.2 软件功能
不考虑软件分布情况,从软件功能上区分,将软件划分为如下4个功能模块:指挥机上位机模块、数据服务模块、网络服务模块和人机交互UI界面。
通航运行支持软件业务层功能组成如图4所示。
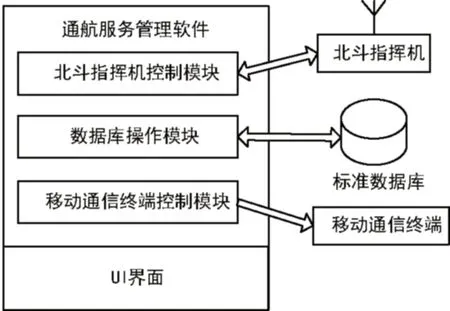
图4 通航运行支持软件业务层功能组成
(1) 软件主要功能实现
软件通过标准RS232协议完成北斗指挥机的操控功能实现,通过与各类型的北斗普通终端设备构成调度关系,能够实时将下属用户定位信息显示在电子地图上,实现多用户的统一监控和管理。数据库采用的是微软的Access软件实现分布式架构,利用标准插入、检索以及删除语句实现数据库信息的推送操作,同时要求供方提供服务器本控、程控、垂直检索和数据网络服务的解决方案。网络服务器使用Apache + Tomcat + WebGIS的技术架构,设计时结合使用Apache处理静态网页的优势能力和Tomcat处理JSP请求和Servlet请求的优势能力,实现可以吞吐大容量数据请求的网络服务端。后台使用WebGIS完成地图服务引擎的架构,地图服务引擎通过空间数据引擎SDE管理空间数据,实现在Microsoft SQL Server中存储、管理及快速检索空间数据,同时集成非空间数据。
(2) 软件UI界面设计
完成良好的人机交互界面设计,界面上显示内容:本地航段受控通航飞行器一览、飞行器上次通报时间及位置信息、RD入站信息编辑栏、数据库检索栏、短信服务编辑栏以及联系人快捷选择栏。
2.2 系统工作流程
按照系统用户使用方式,总结系统中的信息流,梳理出以下5种典型工作流程:
① 接收由移动端或者桌面端飞行器用户的飞行计划申报,然后将所有飞行计划打包传到区域航空管理局计划审批中心;
② 空中用户将自身RNSS定位结果通过RDSS链路或者地面移动蜂窝网链路上报到北斗指挥监视系统,然后北斗的位置信息将与其他的多源监视信息融合,再由通航地面服务系统软件完成数据的存储以及数据服务的发布;
③ 空中用户通过万维网向通航地面服务站系统提交飞行前申报,并且在飞行前通过访问通航地面服务站系统获得飞行中的情报信息,包括气象信息、临时禁飞以及其他影响安全飞行的服务信息;
④ 北斗通航地面服务站可通过地面专网、公网方式接入多源服务信息,包括地方空管地面二次雷达监视信息、全国气象信息或者军民航发布的禁飞公告信息,及时更新服务站的最新情报信息;
⑤ 通航公司、军民航空管监管部门、以及大众用户通过万维网固定或移动终端,通过授权访问通航运行支持软件,获得空中用户位置以及状态信息,进行远程监测。
用户通过万维网,登录授权用户访问通航地面服务站,可以提交飞行计划,并获知飞行计划的审批情况;可以获取气象服务信息;以及获取到所关注的飞行器的飞行状态,包括航迹信息和风险预警信息等等。通航运行支持服务平台系统数据流如图5所示。
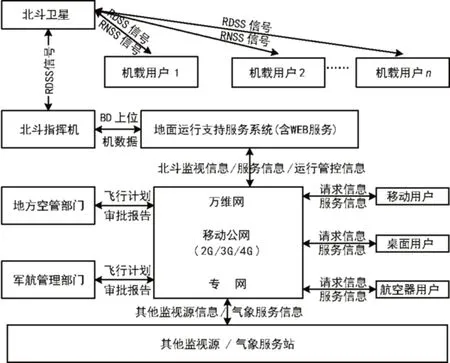
图5 通航运行支持服务平台系统数据流
3 运行效果分析
借助中国飞龙通航有限责任公司的海监、物探和护林通航飞机进行了搭载飞行测试验证,表1和图6均为实际监视的结果,在洋区没有地面蜂窝网的时候北斗星基定位和通信技术可以有效监视海监飞机。同时,北斗星基通信技术还可以支持地空双向CPDLC管制指令的发送和相应,以承载通用航空的飞行业务应用。

表1 北斗号164619监视数据片段
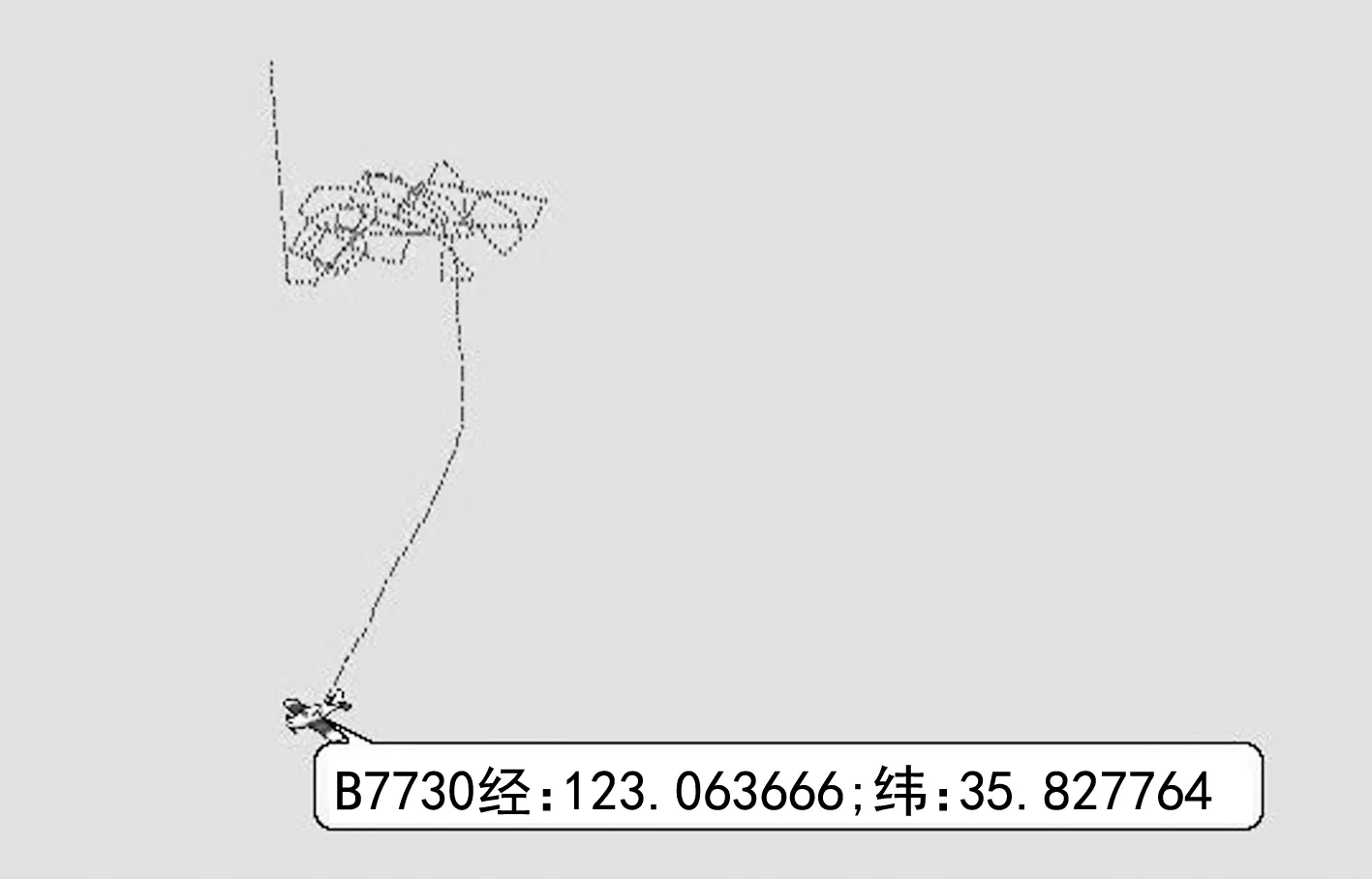
图6 北斗通航胶东海监飞机监视局部放大
与使用UAT频段的通航ADS-B技术以及地面一次二次、雷达相比,北斗星基的位置感知以及控制技术具有得天独厚的优势。首先,在亚太洋区,岸基的一次、二次雷达最多可以预警监视深入大陆架200海里的范围,地面ADS-B监收设备低空最理想也只能达到180海里的范围,而北斗星基的自相关监视技术采用星基通讯监视技术,凡是在北斗GEO卫星的亚太覆盖范围内的航空器,均可进行实时的相关监视;其次,岸基雷达和地面ADS-B监收设备如果在洋区或者山区进行多点部署,成本是一个极大的制约因素;最后ADS-B技术及地面雷达技术均属于信息单向流技术,指能进行监视,而不能进行遥控指令的分发,基于北斗RDSS数字报文技术,地面指挥控制中心可将控制指令直接发送至航行器用户,做到双向通信、及时发布气象预警信息和其他航向航路预警信息。综上所述,在通用航空领域使用我国自主的PNT北斗技术,是符合我国国情的,也具有一定的国际先进性。
4 结束语
针对当前通用航空飞行器飞行监管中遇到的 “看不见”、“管不到”和“用不起”的难题,分析了通用航空运行特点,综合运用北斗定位通信一体化能力,提出了北斗空中管制地面自动化监视技术、北斗通航业务承载能力测试技术和地面指挥系统安全组网技术等多项关键技术。对监视系统进行原型设计并展开测试验证,测试结果表明,本文提出的北斗星基位置感知控制技术作为补充监视手段,与传统的低空监视手段相比,在山地和洋区等雷达覆盖薄弱地区,可以达到实时感知、可信感知监视效果。本文研究的成果加快了我国北斗航空应用进程,降低了通用航空企业和无人机企业的运营成本,解决了低空安全管制对无人机发展制约的瓶颈问题,推进我国低空空域改革的顺利实施。
[1] KAPLAN E D.Understanding GPS Principles and Application[M].Artech House,Inc.,1996:232-307.
[2] CHAO Y C,TSAI Y J,WALTER T,et al.The Ionospheric Model Improvement for the Stanford WAAS Network[J].Proceedings of NTM 96,1995(1):531-538.
[3] 郑 娜.我国导航卫星定位系统在军事航空监视中的应用研究[D].长沙:中国人民解放军国防科学技术大学,2005:37-40.
[4] 苗 帅.基于NS2的UAT数据链仿真设计与实现[D].北京:北京邮电大学,2012:59-75.
[5] 白松浩.空中交通管制监视技术综述[J].无线电工程,2005,35(10):19-23.
[6] 赵文军,杜 燕,栗 靖.双星定位系统在新航行系统中的应用研究[J].无线电工程,2005,35(8):28-31.
[7] 侯本涛,陈治平.无人机GPS系统定位能力分析[J].无线电通信技术,2004,30(6):33-36.
[8] 秦轶炜,尤祖光,叶 舟,等. 低空监视雷达气象信号处理的设计与实现[J].无线电工程,2014,44(10):31-34.
[9] 李 奇.基于中继卫星的无人飞行器组网体制研究[J].无线电工程,2015,45(4):1-4.
[10] 陈 珊,陈光仁.基于航空卫星通信的飞行监视数据的处理[J].无线电工程,1999,29(4):19-23.
[11] 邵 帅.ADS-B航迹处理及显示技术研究[D].哈尔滨:哈尔滨工程大学,2014:52-78.
[12] 吴俊晨,任文成.高空平台无线通信系统设计[J].无线电通信技术,2013,39(1):33-36.
[13] 窦长江,周 兵.GPS用户机抗射频干扰研究[J].无线电通信技术,2007,33(6):22-25.
[14] 李红伟,李仕云,纪学军.一种高精度运动多站无源定位算法[J].无线电工程,2014,44(3):37-39.
[15] 翟庆伟.机载单站无源定位技术研究[J].无线电工程,2007,37(3):7-11.
[16] 党 刚.VHF频段航空协作通信的调制技术研究[D].郑州:郑州大学,2013:44-79.
[17] 范项媛.无人飞行器的北斗卫星组合导航算法研究[J].网络安全技术与应用,2014(5):25-27.
[18] 卢伯英.全球卫星定位系统在民用航空航行系统中的应用[J].民航经济与技术,1997(4):22-24.
Monitoring and Controlling of General Aviation in Low AltitudeOperation Based on Beidou System
WANG Zhen-hua1,ZHANG Xing-jian2,LIU Yun-feng3
(1.StateKeylaboratoryofSatelliteNavigationSystemandEquipmentTechnology,ShijiazhuangHebei050081,China;2.CivilAviationUniversityofChina,Tianjin300000,China;3.ChinaFlyingDragonGeneralAviationCo.LTD,HarbinHeilongjiang150060,China)
The gradual opening of the low altitude leads to the increase of flight conflict and the increase of control difficulty.An integrated technology of Radio Determination Satellite Service(RDSS)and Radio Navigation Satellite System(RNSS)was proposed,to solve the problem of low altitude cooperative surveillance and controlling.Beidou ground command and control system,navigation and service station and airborne equipment,which were designed and tested in the northeast and northwest of China for pilot flight,achieved good results.Compared with the traditional ground radar and ground-based ADS-B surveillance technology applied in aviation industry,independent PNT resources were used in this integrated technology by combining RDSS and RNSS,which has the advantages of lower cost and wider airspace monitoring.
general aviation;collaborative monitoring;Beidou;radar;ADS-B;PNT
2017-02-27
中国民航大学中央高校基本科研基金资助项目(3122015B003)。
10.3969/j.issn.1003-3106.2017.06.08
王振华,张兴俭,刘云峰.通用航空北斗星基位置感知控制技术[J].无线电工程,2017,47(6):32-37.[WANG Zhenhua,ZHANG Xingjian,LIU Yunfeng.Monitoring and Controlling of General Aviation in Low Altitude Operation Based on Beidou System[J].Radio Engineering,2017,47(6):32-37.]
TN967.1
A
1003-3106(2017)06-0032-06
王振华 男,(1985—),硕士,工程师。主要研究方向:卫星导航、导航新理论、航空导航。
张兴俭 男,(1986—),博士,助理研究员。主要研究方向:空中交通管理。
猜你喜欢
工会博览(2023年1期)2023-02-23
小哥白尼(神奇星球)(2022年3期)2022-06-06
工会博览(2022年16期)2022-02-04
当代陕西(2019年18期)2019-10-17
当代水产(2019年3期)2019-05-14
西南石油大学学报(社会科学版)(2016年1期)2016-12-01
太空探索(2016年12期)2016-07-18
太空探索(2016年3期)2016-07-12
太空探索(2016年3期)2016-07-12
太空探索(2016年8期)2016-07-10
