激光坦克对战玩具系统
2017-06-01 10:25:34李杰坷陈平平简瑞谦陈俊曾德镗许泽都张志坚
电子测试 2017年1期
李杰坷,陈平平,简瑞谦,陈俊,曾德镗,许泽都,张志坚
(东莞理工学院电子工程与智能化学院,广东东莞,523080)
激光坦克对战玩具系统
李杰坷,陈平平,简瑞谦,陈俊,曾德镗,许泽都,张志坚
(东莞理工学院电子工程与智能化学院,广东东莞,523080)
为了解决现有玩具坦克的不足,设计并实现了一种激光坦克对战玩具系统,该系统由多种功能的坦克组成,并能实现集群作战。文中系统地介绍了激光坦克和对应遥控器的基本结构、组成和实现方式。
玩具;坦克;激光
0 引言
目前市场销售的激光玩具坦克的功能类型单一,激光感应不灵敏,无法实时观察周围环境且多台玩具坦克同时操作时相互之间会干扰,给使用者带来不便,严重降低了玩具的趣味性,无法体验团队合作的快感[1-2]。本文介绍了一种激光坦克对战玩具系统,该系统由补给型坦克、维修型坦克和大中小型战斗坦克等多种类型坦克组成,具有坦克类型功能多样,可多台坦克同时操作,组团对战的优点。
1 功能设计
为了实现一个完整的模拟真实坦克之间对战的系统,让使玩家仿佛置身于真实的坦克之中。首要的便是能否检测被“炮弹”打中和发射“炮弹”,而且能够对这些情况做出相应的反应,因此在玩具坦克上面覆盖有激光感应模块,激光感应模块覆盖的区域有分:机动区域,躯干区域以及炮台区域,每个区域都有各自的寿命值,各部分的意义也不一样,如炮台随着寿命值下降,攻击速度会下降直至为0,且每辆坦克设置的炮弹数是有限的,发炮系统模拟现实情况,设有开炮持续时间和冷却时间,在冷却时间内即使发开炮命令也无法开炮,基于以上设定,提出了具有维修和补给功能的坦克,而这些维修以及补给的信号传输便是基于近场通讯模块实现的。速度的控制主要是由主控芯片通过接收测速模块反馈的信息和遥控器的遥控信息并进行相应的处理后调节PWM占空比来实现的。为了模拟坦克发射炮弹以及被炮弹打到的效果,在遥控器上安装有震动模块。
本设计的坦克类型和功能参数如表1所示。不同类型的坦克除了在功能特点上有差别外,在寿命、火力、射击频率、移动速度和弹药数量都有所不同。
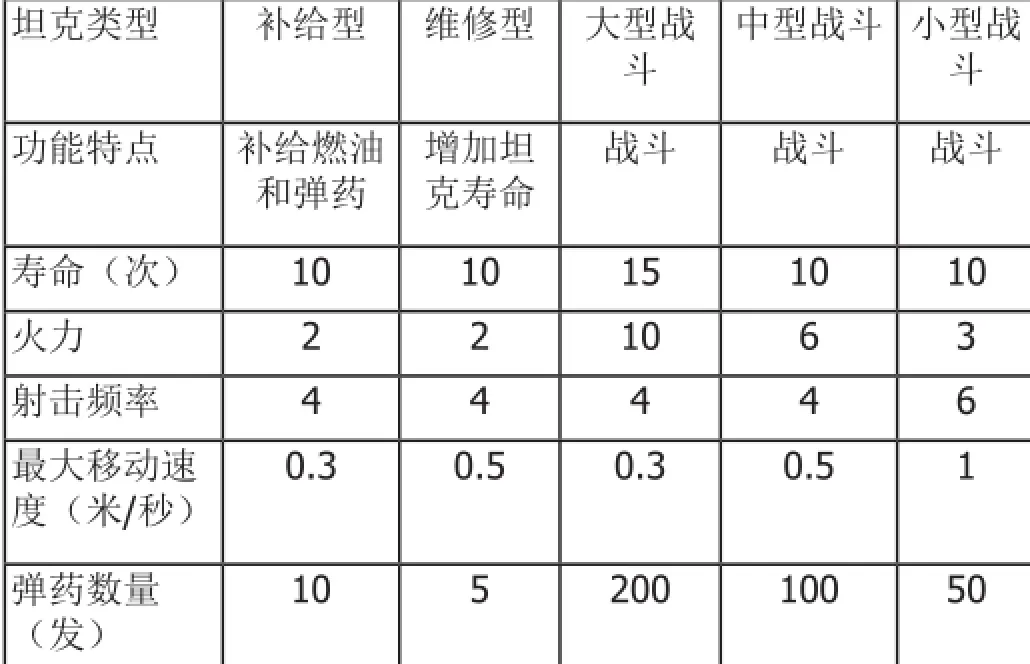
表1 坦克类型和功能参数表
2 坦克实现
坦克由坦克主控模块、电源模块、行车控制模块、、激光发射模块、感光模块、摄像头模块、视频传输模块、测速模块和近场通信模块组成。
主控模块负责整体的控制和系统模块间的协调,设计中采用ST公司推出的STM32F407VET6,该芯片基于Cortex™-M4为内核,采用了90 纳米的NVM 工艺和ART(自适应实时存储器加速器,Adaptive Real-Time MemoryAccelerator™)。最高主频可达168MHZ,同时集成了新的DSP和FPU指令,并具有多重AHB总线矩阵和多通道DMA:支持程序执行和数据传输并行处理,数据传输速率非常快。该芯片的优越性能完全可以胜任车身主控的处理任务,而且价钱也相对合理。
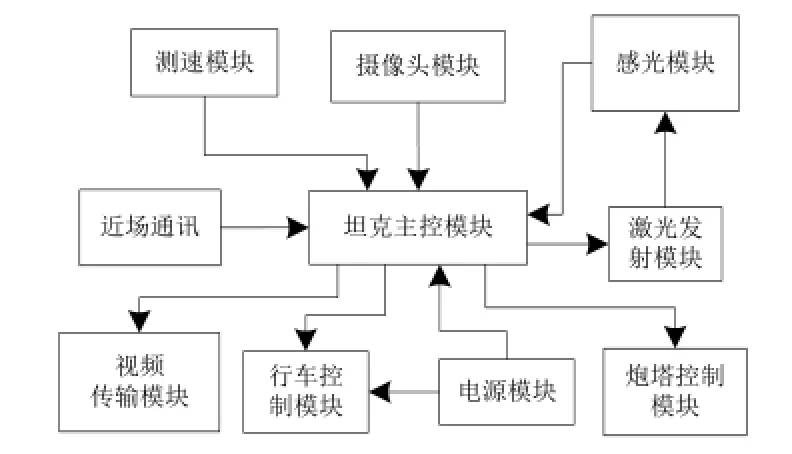
图1 坦克系统框图
电源模块采用9000mA的锂电池为核心,包括有充电管理电路,电压转换电路等,负责为整个系统提供6V,3.3V和一个可调电压源,6V电压主要用于驱动电机工作,3.3V电压则是为各模块以及主控芯片提供电压,而可调电源则为感光板提供电压,通过调节合适的电压,可在保证系统正常工作地前提下降低整个系统的功耗。
行车控制模块包括直流电机驱动电路和6个直流电机,负责坦克的行进、速度控制和炮台、炮管的移动。直流电机驱动电路的驱动芯片为TB6612FNG,不同类型的坦克的最大速度通过设定最大PWM占空比来实现。
激光发射模块由红外激光管、透镜和驱动电路组成。不同类型的坦克在激光发射模块中有较大区别,不同类型的坦克在激光管的功率有大小和光斑面积大小上有所不同。
感光模块由多种规格大小的光敏电阻和比较器电路组成,分布于坦克车身的四周。该模块在被激光照射时,能输出电平信号给坦克的主控模块,模拟被其他坦克打中的情况。
摄像头模块选用OV2640,负责采集坦克前方的图像,并进行视频压缩后通过视频传输模块发送给遥控器。OV2640相较于其他摄像头模块,其主要的特点是能够直接输出JPEG图像数据,该功能相较于直接的RGB输出方式,最大的优势在于可使图像数据流量大大减少同时对图像画质损失较小,降低了对网络带宽以及对缓存设备容量的要求。
视频传输模块,采用美满电子(Marvell)生产88W8782无线单芯片解决方案,该模块符合802.11n标准,具有高达150Mbps的无线传输速率,主控模块STM32F4通过SDIO方式驱动WIFI模块发送来自OV2640的JPEG数据流,负责图像传输和控制命令的传输。
测速模块,采用HC-020K测速传感器,这是一款宽电压、高分辨率、短响应速度、开关量输出的测速模组,通过码盘的栅格数以及车轮半径来算出具体速度,反馈给主控器即行车速修正。
近场通信模块采用的射频芯片为PN532,主要用于坦克车与坦克车之间进行维修、补给时的数据传输。通信距离小于2cm,即基本上是要求两个坦克车的近场通信模块是挨碰在一起,真实地模拟维修和补给。
3 遥控器实现
遥控器由遥控主控模块、电源模块、震动模块,视频接收模块、显示模块、控制装置模块等组成。

图2 遥控器系统框图
遥控器系统中包含两片处理芯片,分别为ST公司的STM32F103C8T6和STM32F407ZET6。其 中STM32F103C8T6处理器主要负责摇杆数据的采集、处理、OLED驱动和震动模块的控制。STM32F407ZET6处理器主要负责WIFI模块的驱动、视频解码和视频显示模块的驱动。STM32F103C8T6和STM32F407ZET6之间通过串口通信协调整个系统的运作,坦克的控制信号由STM32F103C8T6采集后经由串口发送到STM32F407ZET6,再由STM32F407ZET6通过WIFI模块发送到坦克端,控制坦克动作。坦克返回的信息也通过WiFi,STM32F407ZET6,STM32F103C8T6后由STM32F103C8T6显示到OLED上,让玩家可以实时地了解到自己坦克目前的状态。
电源模块采用1000mA的锂电池为核心,包括有充电管理电路,过放过流保护,升、降压电路和稳压电路等,负责为整个遥控器提供3.3V的电压。由于遥控器需要一个稳定的电压,且视频传输模块、显示模块都需要较大的电流,而该电源模块能很好的处理上述问题。
震动模块用4HK08-Y微型震动电机,其功能主要用于模拟坦克发射炮弹以及坦克受到敌放炮弹打中时的震动效果。
视频接收模块以STM32F407为主控核心,STM32F407通过驱动WIFI模块W8782接收连续的JPEG数据流,使用libjpeg库解码为RGB565格式,最终连续刷新到LCD上,实现图像的实时显示。
显示模块主要有OLED屏以及ILI9486L液晶屏,OLED屏的显示由STM32F103C8T6控制,主要用于显示坦克各个状态的数据。ILI9486L液晶屏由视频传输模块控制,主要用于显示坦克传送过来的图像数据。
控制装置模块主要由摇杆电位器以及按键组成,主控芯片通过AD采样摇杆电位器的电压值来获取摇杆的转动角度数据,而这些角度数据用于控制小车的前进后退以及炮台的转动,而按键用于控制激光的发射。
4 结语
本文介绍了激光坦克对战玩具系统要实现的功能以及目的,并对其组成和结构进行介绍,该系统突破了传统的游戏模式,拥有多样的游戏方式,使其具有很大的开发潜力以及广阔的市场前景。
[1]周艳,李青. 我国智能玩具研究现状述评——基于2002—2014年中文文献[J]. 北京邮电大学学报(社会科学版),2016,01:113-120.
[2]2016中国玩具市场概况[J]. 玩具世界,2016,08:33-36.
The System of laser toy tank battle
Li Jieke,Chen Pingping,JianRuiqian,ChenJun,ZengDetang,XuZedu,Zhang Zhijian
(School of electronic engineering and intelligent engineering,Dongguan University of Technology,Dongguan Guangdong,523808)
In order to solve the shortage of the existing toy tanks, The laser tank war toy system was realized and designed. this system was composed of a variety of functions of tanks, and can realize the cluster operations. In this paper, the basic structure, composition and realization mode of the laser tank and the corresponding remote controller are introduced.
Toy; tank; laser
李杰坷(1995-),男,河南南阳人,本科在读,电子信息工程专业。陈平平(1983-),女,广东湛江人,硕士,从事嵌入式、电子测控
2016年大学生科技创新培育专项资金项目(pdjh2016a0487),广东省科技计划项目(2016B090918131,2015A020214024)。
方面研究。
猜你喜欢
学与玩(2022年8期)2022-10-31 02:41:58
小学生学习指导(小军迷联盟)(2020年12期)2021-01-05 12:16:24
作文大王·低年级(2020年9期)2020-10-12 02:41:03
作文大王·低年级(2020年9期)2020-10-12 02:41:03
知识就是力量(2019年12期)2019-01-14 02:52:47
科技知识动漫(2017年5期)2017-05-11 00:07:47
小溪流(画刊)(2017年3期)2017-03-23 18:14:53
小学阅读指南·低年级版(2016年12期)2017-01-05 12:23:24
为了孩子(孕0~3岁)(2016年10期)2016-10-11 19:56:04
人生与伴侣·共同关注(2015年22期)2015-05-30 10:48:04