
基于DOE的标识光场整形系统设计
2017-06-01 11:29包海廷欧阳名钊王志勇张丽娜
长春理工大学学报(自然科学版) 2017年2期
包海廷,欧阳名钊,王志勇,张丽娜
(1.长春理工大学 光电工程学院,长春 130022;
2.空军95926部队,长春 130022;3.长春理工大学 图书馆,长春 130022)
基于DOE的标识光场整形系统设计
包海廷1,欧阳名钊1,王志勇2,张丽娜3
(1.长春理工大学 光电工程学院,长春 130022;
2.空军95926部队,长春 130022;3.长春理工大学 图书馆,长春 130022)
使用二元光学元件进行远距离、大光场的整形,成像均匀度低、成像光场的尺寸也不易控制。依照衍射光学元件整形原理,提出了一种将双镜组预整形系统和衍射光学元件(Diffractive Optical Elements,DOE)整形器相结合的DOE标识光场整形系统方案,并提出了一种优化的二次平滑修正算法以适用于远距离大光场的DOE设计。可用于远距离大光场的激光主动照明或者信号标识。实际工程指标设定为在1m距离上,对波长为532nm,直径2mm的激光进行整形,得到360mm×288mm的矩形光场,保证其均匀度大于97%,能量转换率大于90%。Virtual Lab仿真结果表明,理论上系统的均匀度可达98.91%,能量转换率可达91.69%,成品测试结果表明,该系统实测整形光场均匀度为97.33%,能量转换率为90.92%。仿真和测试结果表明,设计符合预期的工程要求,证实了设计选型和算法优化的正确性。
远距离成像;光束整形;预整形系统;衍射光学元件
随着激光工程应用在越来越多的领域,需要激光能够适应不同的工程需求,对激光束进行整形的研究也应运而生。激光束整形技术是指通过对入射激光进行调制改变其光强及相位特性,得到预期的光场或光束。现有的激光整形方法有很多,比如光楔阵列聚焦光学系统、液晶空间光调制器、双折射透镜组、随机相位板、衍射光学元件、非球面镜等等。而使用衍射光学元件进行光束整形是具有衍射效率高、可重复性强等优点,表现出广泛的应用前景[1-4]。
近年来,人们对DOE在光场整形上的研究不断深入,从理论上说,DOE几乎可以在物理实际条件允许范围内,将任意光束进行光场变换得到所需要的任意光束。但是大多是应用在成像场距离小于500cm,成像尺寸相对较小的范围内。本文从衍射元件整形原理出发,分析认为远距离大光场整形仅对成像场的均匀度及能量转换率要求较高,对场外噪声等评价参量要求较低。因而提出了一种优化的二次平滑算法用于提高整形系统对远距离成像的适应性。加入预整形系统,除了对待整形光束进行准直和扩束外,减小了光束的发散角,使最终整形光场的光斑更为密集和微小[5-7]。
1 设计原理
基于DOE的标识光场整形系统的功能结构主要包括预整形系统和DOE整形系统,如图1所示。该系统通过双镜组预整形系统减小入射光的发散度,并通过对DOE整形系统的后期调制实现在固定距离的长距离场成像。通过使用优化平滑算法计算DOE,得到成像均匀度和成像光强的最优解。
加入预整形系统的目的是为了减小激光初始的发散角,同时对整形前光束进行准直处理。光束减少发散角后会使经DOE整形后得到的最终整形光场的光斑更为汇聚、光场均匀度更高。预整形系统采用双镜组结构。这种结构相对于透镜圆锥镜或锥透镜等结构,成本低,但效果相同。

图1 远距离DOE整形系统原理示意图
DOE整形分系统由一片透射式位相型DOE和一片紧密连接的Fourier透镜组成,这种结构在DOE设计中属于1f工作方式整形器。1f结构的工作装置中,DOE将输入光场的位相及振幅进行调制,利用透镜使出射光束在成像面叠加。这种结构对DOE的设计质量要求较高,但透镜只是起到聚焦作用,所以,整个工作装置的尺寸自由度较高,同时对光场整形的效果也完全取决于DOE,只需要根据成像距离调节适应的透镜焦距就可以很好地起到光场内的衍射光位相叠加,这样的结构适用于远距离的激光束整形,成像光场可调制为任意2D图案。
2 预整形系统设计

2θ1,2θ2分别为入射光变换前后的发散角,2ω01,2ω02分别为入射光变换前后的束腰直径,Z01,Z02分别为入射光变换前后的等效共焦参数。
采用双镜组的预整形系统可减小激光束发散角[8]。选取负的前镜组使系统变得更紧凑,后镜组为正镜组,系统的角放大率如下式:

图2 预整形系统图
入射光经前镜组变换后束腰位置和等效共焦参数为:其中,χ1为变换前焦距,f′1为变换后的焦距。为使输出光束得到最小的发散性,要求入射激光束经前镜组组变换后束腰直径具有最小的尺寸并位于正镜组的前焦面上,即χ2=0,满足以上条件可使用短焦距镜组,并使前镜组的后焦点位于离正镜组前焦点距离χ′1处,
经前镜组变换后的激光束对于正镜组来说,是物空间的光束,所以2ω′01=2ω02,

在Δ=0时,双镜组系统为望远系统,它的角放大率为:

(6)式根号内表达式总是小于1,由(5)式和(6)式可知,发散系统的角放大率以及发散性都比望远系统小,因为正镜组物方束腰位于前焦平面上,其像方束腰必然在后焦平面上,能够得到最理想的准直效果。
综上,为了减小光束的发散性,从而减小衍射角,双镜组的计算可以按以下步骤进行:
已知激光器的光束角发散性为2θ1,束腰直径2ω01,选定束腰相对第一镜组前焦点的位置,前镜组通光口径D1=3ω01,ω01为前镜组主面位置上的截面半径,在系统像差只需校正球差与正弦差的条件下,确定前镜组的相对孔径值,然后选择前镜组的焦距′,
b.按照(3)式,求出经前镜组变换后的激光等效共焦参数Z02(Z02=。

正镜组的通光口径D2≥3ω20,可由下两式求出:

ω20为正镜组主面位置上光束截面半径。设计结果如表1。
通过表1可以看出,最终设计的预整形系统,结构小而紧凑,有效的降低了整系统的尺寸。对于整系统来说,加入如上结构的预整形系统大幅优化了DOE分系统的整形前环境,预整形后的光束不仅扩束准直,也进一步的减小了发散度,可以使最终整形光场的光标识光斑更为汇聚和密集。
3DOE设计的算法描述
基于DOE的标识光场整形系统,通过参数指标来看,属于远距离大光场的光束整形。特别是应用在大光场的主动照明和光标识上,要求整形后的光场,图案清晰,能量转换率足够高。而考虑远距离的整形,其场外噪声对整形器应用的实际影响不大,噪声光束会随着距离的增加而严重衰减。所以在DOE设计时要选取一种预期光场内均匀度足够高的优化算法。
为了改善输出光束在信号窗内的均匀性,对远距离大光场的DOE整形成像,无需考虑场外噪声的影响,DOE的设计采用一种优化的二次平滑修正法。
对于常用G-S算法来说,它的迭代优化过程是不断地通过预期振幅函数(光强函数)和入射振幅函数对DOE相位进行约束[12]。那么适用于标量理论的迭代过程中可理解为:
Iideal(x,y)表示成像场的振幅,f(x0,y0)是预整形后光束的复振幅,φ0(x0,y0)是要求的DOE元件位相,H(x0-x,y0-y,z)是三维光波反馈函数,若整形后的复振幅分布 f(x0,y0)exp(i φ0(x0,y0))与光场复振幅分布U(x,y)互为傅里叶导数,那么

在这种迭代运算的约束条件与过程中,计算得到的DOE位相使得出射的整形光束各个相位的振幅都趋近于预期振幅,虽然多数的能量都转换到了成像光场内部(场外噪声小),但是因为没有对整形的预期位相进行不断地约束,这就会导致成像光场内的振幅分布不均匀,从而导致整形光场的均匀度下降,整形图案的成像质量会很粗糙,轮廓不清楚,特别是如果应用到大光场的远距离成像中,这种算法会严重影响整形效果[13-14]。
普通平滑修正法与G-S算法的迭代思路一致,但对振幅修正处理方式不同。G-S优化法是利用预期成像场振幅|2|来替换迭代过程中求得的振幅U2k,是对全部成像场的光强进行修正。而平滑修正算法只对期待的成像光场内的光强分布约束。提出一种新的二次平滑修正算法,对该算法进一步优化将循环次数k变为2k,两次循环可得到能量转换率更高的最优解,公式为

再将聚焦透镜代入,最终光场分布整理为

4 仿真与实验的结果和分析
4.1 仿真结果与分析
输入光束波长为532nm,直径2mm,成像场距离聚焦透镜1m,预期得到360mm×288mm的矩形光场。DOE阶数为4,经过预整形系统后得到的束腰直径为0.4mm,以常见室内大气环境为外环境。计算选取500个初始相位,衍射光场取样点数为429× 333,分别用G-S算法和二次循环平滑修正法进行1000次迭代。二次循环平滑修正法得到的DOE位相制作模型如图3、图4所示。
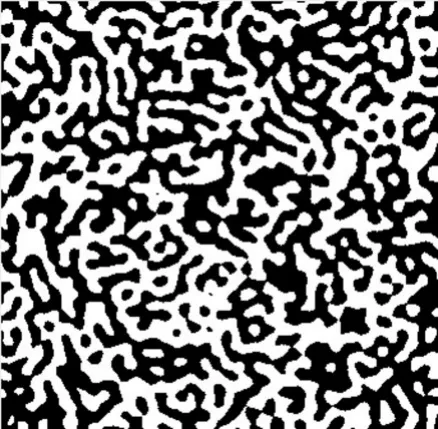
图3 掩膜#1设计模板图样
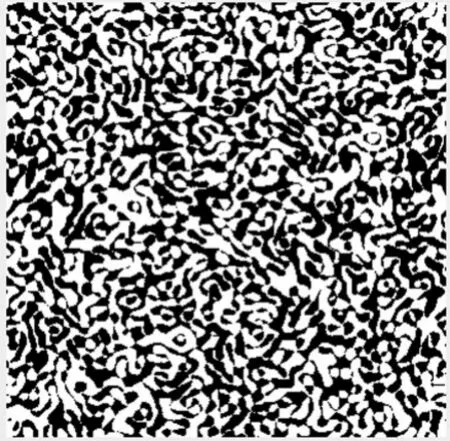
图4 掩膜#2设计模板图样
最终计算出采用GS算法的成像光场不均匀度为10.8%,能量损耗率为5.2%。采用优化平滑修正算法,得到的成像光场不均匀度为1.09%,能量损耗率为8.31%。将光学系统光路设置到VIRTUAL LAB软件中,设置软件中的取样分辨率为429×333,取样点间距为240nm×190nm。得到的仿真光场如图5、图6所示。

图5 GS算法仿真结果

图6 二次循环平滑修正算法仿真结果
将计算结果代入到MATLAB软件中得到输出结果图图7和图8,利用二次循环平滑修正法得到的数据成像场平滑,均匀度高,边缘棱角分明,很接近理想指标;而利用G-S算法所得到的数据顶部突起严重,均匀度低,虽然能量转换率达标,边缘不明显,场内能量分布不均;利用平滑修正法得到的结果顶部均匀性较G-S算法有明显改进,但均方差大(场外噪声较大)。仿真实验证明了优化算法和本文光学系统设计的优化性和可行性。

图7 盖师贝格-撒克斯通算法的输出结果

图8 二次循环平滑修正法的输出结果
4.2 实验结果与分析
根据计算结果制作了光学系统的元件,并组成光学系统,如图9所示。将基于DOE的标识光场整形系统置于暗室进行系统的检测实验,由于成像场尺寸较大,成像面直接在墙上成像,使用1300万像素照相机进行了数据采集。激光器选用常用的国产532nm激光标识器,光束直径2mm,初始束腰直径1μm。实验光场如图10所示。

图9 远距离光场整形系统实验图

图10 实验光场图
将采集的数据结果经过灰度处理后,输入到MATLAB软件中,设置软件中取样分辨率为429×333,取样点间距为240nm×190nm。得到系统的能量转换率为90.92%,均匀度为97.23%。跟理论计算出的能量装换率91.69%,均匀度98.91%存在一定差异。检测光场结果输出如图11所示。

图11 DOE光场整形系统检测输出结果图

图12 DOE光场整形系统检测结果某截面光强分布
从输出结果图可以看出,整形光场顶部平滑,边缘轮廓清晰明显,中间附近产生的尖锐性突起是因成像墙面自身产生的反射产生的,总体来说整形光场的均匀度好,能量转换效果也很好。周围产生的场外噪声也分布均匀且向外呈发散型衰减。为了排除墙面反射对输出结果评价造成的影响,提取了输出光场未受影响的一个截面进行了单独分析,其结果如图12所示。实验结果表明,基于DOE的标识光场整形系统能够达到预期的设计要求,符合设计指标。
5 结论
通过实验,验证了基于DOE的标识光场整形系统符合预期的设计指标,可以在1m距离上将532nm的激光整形成360mm×288mm的光场,成像光场的能量转换率为90.92%,成像均匀度为97.23%。满足均匀度大于97%,能量转换率大于90%的指标。证明选择的光学系统模型和提出的二次循环平滑修正算法是一种较好的可用于远距离光场整形的设计新方法,能够应用在实际的工程实践中。
[1]王炜,裴珉,李永平,等.连续工艺衍射光学元件的应用特性分析[J].中国激光,2001,28(1):41-46.
[2]Meifeng D,Song X,Li Shen,et al.The designation and experiment of the DOE applied to shape the laser beam to square frame shape[J].Laser Technology,2005,29(2):169-164.
[3]Poleshchuk A G,Korolkov V P,Burge J H.Polar-coor⁃dinate laser writing systems:error analysis of fabricated DOEs[J].Proceedings of SPIE-The International So⁃ciety for Optical Engineering,2001,4440.
[4]贾书海,孔维军,杨佳.基于衍射微透镜的光学加速度传感器设计[J].光学学报,2007,27(8):1494-1497.
[5]崔庆丰.折衍射混合光学系统的研究[D].长春:中国科学院长春光学精密机械与物理研究所,1996.
[6]Goodman J W.Introduction to Fourier optics,Second Edition[J].Optical Engineering,1996,28(4):595-599.
[7]于晓晨,胡家升,王连宝.提高激光束整形质量的新方法[J].中国激光,2012(1):229-234.
[8]陈旭南,姚汉民,李展,等.亚半微米投影光刻物镜的研究设计[J].微细加工技术,2000(1):26-30.
[9]刘强,李珂,杨佳,等.衍射光学元件设计中的插值迭代方法[J].计算物理,2009,26(5):731-736.
[10]Skeren M.Iterative Fourier transform algorithm:differ⁃ent approaches to diffractive optical element design[J]. Proc Spie,2002,4770:75-88.
[11]翁开华,刘金清.激光准直系统的设计[J].福建师范大学学报:自然科学版,2001,17(2):35-39.
[12]张艳,张静娟,司徒国海.高斯光束变换成方形均匀焦斑的衍射光学元件的研究[J].中国激光,2004,31(10):1183-1187.
[13]林勇,胡家升,吴克难.一种用于光束整形的衍射光学元件设计算法[J].光学学报,2007,27(9):1682-1686.
[14]林勇.用于激光光束整形的衍射光学元件设计[D].大连:大连理工大学,2009.
Design of Light Field Shaping System Based on DOE Identification
BAO Haiting1,OUYANG Mingzhao1,WANG Zhiyong2,ZHANG Lina3
(1.School of Optoelectronic Engineering,Changchun University of Science and Technology,Changchun 130022;2.The Air Force 95926 Regiment,Changchun 130022;3.Library of Changchun University of Science and Technology,Changchun 130022)
By using a binary optical element in long-distance with large plastic light field,the image uniformity is low and the size of the imaging light field is not easy to be controlled.According to the principle of diffraction optical element shaping,a DOE identification light-field shaping system combining two-mirror pre-shaping system and DOE’s shaper is proposed,and an opti⁃mized quadratic smoothing correction algorithm is proposed for DOE design of long-distance large-field.It can be used for longrange laser active lighting or signal identification.The practical engineering index is set to shape the laser light with wavelength of 532nm and diameter of 2mm at the distance of 1m,and the rectangle field of 360mm×288mm is obtained;the uniformity is more than 97%and the energy exchange rate is more than 90%.Simulation results show that the uniformity of the system is 98.91%and the energy conversion rate is 91.69%.The experimental results show that the uniformity of the system is 97.33%and the energy conversion rate is 90.92%.Simulation and test results show that the design meets the expected engineering requirements and the correctness of design selection and algorithm optimization are be confirmed.
long-range imaging;beam shaping;pre-shaping system;DOE
TN202
A
1672-9870(2017)02-0027-06
2016-11-09
包海廷(1989-),男,硕士研究生,E-mail:sirnumber@163.com
欧阳名钊(1983-),男,博士,讲师,E-mail:oymz68@sina.com
猜你喜欢
电子与信息学报(2022年5期)2022-05-31
作文小学高年级(2022年4期)2022-05-27
天然气勘探与开发(2020年4期)2021-01-11
科学(2020年5期)2020-01-05
中国交通信息化(2018年12期)2018-03-21
山东工业技术(2018年2期)2018-03-20
科学与财富(2018年1期)2018-03-03
作文周刊·小学二年级版(2016年45期)2017-07-18
中国交通信息化(2016年12期)2016-06-06
浙江大学学报(工学版)(2015年1期)2015-03-01
