
高精度差分导航的研究和在无人机上的应用
2017-06-01 01:21袁林王峰黄祖德薛更平利传迈汪进
电脑知识与技术 2017年8期
关键词:无人机
袁林 王峰 黄祖德 薛更平 利传迈 汪进 杨春媚

摘要:为了建立一套基于载波相位差分的高精度无人机导航系统,通过移植和修改rtklib开源软件,在嵌入式平台同时搭建了高精度差分基准站系统和流动站系统,通过将差分软件嵌入到无人机软件的运行环境,实现了无人机的高精度飞行。并实际测试,证明了高精度差分系统的显著优势,为此类高精度平臺的建立和差分系统的实际应用提供了参考。
关键词:载波相位差分;无人机;rtklib;嵌入式Linux;高精度飞行
中图分类号:TP393 文献标识码:A 文章编号:1009-3044(2017)08-0244-03
1概述
GPS(Global PositioningSystem)全球定位系统现已广泛应用于各行各业,提供了覆盖全球的导航定位服务,但是GPS单星座的水平和高程定位精度在10m左右,这远远达不到像高精度农业等领域对厘米级甚至毫米级的定位要求,如何提高定位精度并将高精度导航技术应用到无人机领域,一直是一个需要研究的课题。
改善定位精度的方法有很多,例如使用多星座、多频率的高精度板卡来消除多径和电离层等影响、使用精密单点定位(Precise Point Positioning,简称PPP)和使用差分定位等,考虑到应用场合是无人机平台,普通的航拍航测无人机的载重普遍在10kg以下,使用价格昂贵、笨重的高精度专业测量板卡显然无法满足也没有必要,而目前的专业级测量板卡如NovAtelOEM6系列的定位精度RMS在0.75m左右,相对与万元的成本,这种精度的改善对于无人机平台也极其有限。PPP定位是借助于全球若干地面跟踪站的GPS测量数据,计算出精密的卫星轨道和卫星钟差,同时采用双频接收机,消除了电离层延时,再结合自身的观测相位值,可以做到精确定位,达到厘米的定位精度,但是PPP要求的精密卫星轨道和钟差在复杂的无人机野外作业条件中很难获取。
差分定位,尤其是其中的实时动态载波相位差分定位技术,是利用空间上基准站和流动站的相关性将各种误差消除,并通过观测载波相位值,求解载波相位的周整模糊度,达到高精度的相对定位的,在距离小于20km的情况下,定位精度一般可以做到10cm以内,而且本项目使用本实验室自主研发的廉价的便携式基准站系统、结合无人机平台,开发了能在野外快速架设使用的高精度无人机系统,并通过实际测试证明了其性能的可靠性。
2高精度无人机系统的搭建
2.1高精度无人机基准站的搭建和性能测试
基准站系统是实现差分导航的前提,担负着测量卫星信号并向流动站发送校准信息的任务。常用的基准站平台如NovA-tel OEM系列,能够发送多种差分信息。由于其价格昂贵,我们自主开发了相对廉价,性能也满足要求的基准站系统代替,No-vAtel板卡,图1中左边是高性能诺瓦泰基准站系统实物图,右图是本项目开发的便携式廉价差分基准站系统实物图,由于无人机系统首先需要可以在野外便携使用的基准站,下面的测试都将基于该便携基准站系统,诺瓦泰专业板卡将作为对照系进行对比测试。
下面将使用不同差分数据格式和不同基站系统进行精度对比测试。如图2所示,廉价基准站系统在使用原始数据进行载波相位差分定位时,性能和专业板卡接近。图2中的右下部分表明,如果使用RTCM3差分电文,由于自身的系统误差和转换延迟,会带来很大的精度丢失,因此随后的测试都是基于原始数据格式进行差分。
2.2高精度无人机平台的设计
无人机平台的设计分软件设计和硬件设计,其中硬件设计主要涉及无人各传感器的设计和处理器单元的设计,考虑到通用性,我们的无人机处理器单元采用基于实时Linux系统的树莓派嵌入式平台,软件使用开源的APM无人机软件,图3左半部分是整个系统的结构图,右半部分是无人机实物图。
软件设计最主要的是涉及rtklib软件和无人机软件之间的通信和协同工作,为了避免软件之间的强耦合,我们使用网络协议进行进程之间的相互通信,图3上半部分的系统结构图表明了导航数据是使用标准的NMEA协议进行交换的。无人机的主控硬件和基站硬件设计类似,这是为了节省成本,使一套硬件能被两套系统使用,在使用基站功能时,可以适当去除无人机相关的传感器。
2.3高精度无人机平台的野外测试
由于无人机作业一般为视距范围,这里选择短基线进行测试。首先测试的是无人机系统静止时的性能,选择了两个典型场景进行分析:
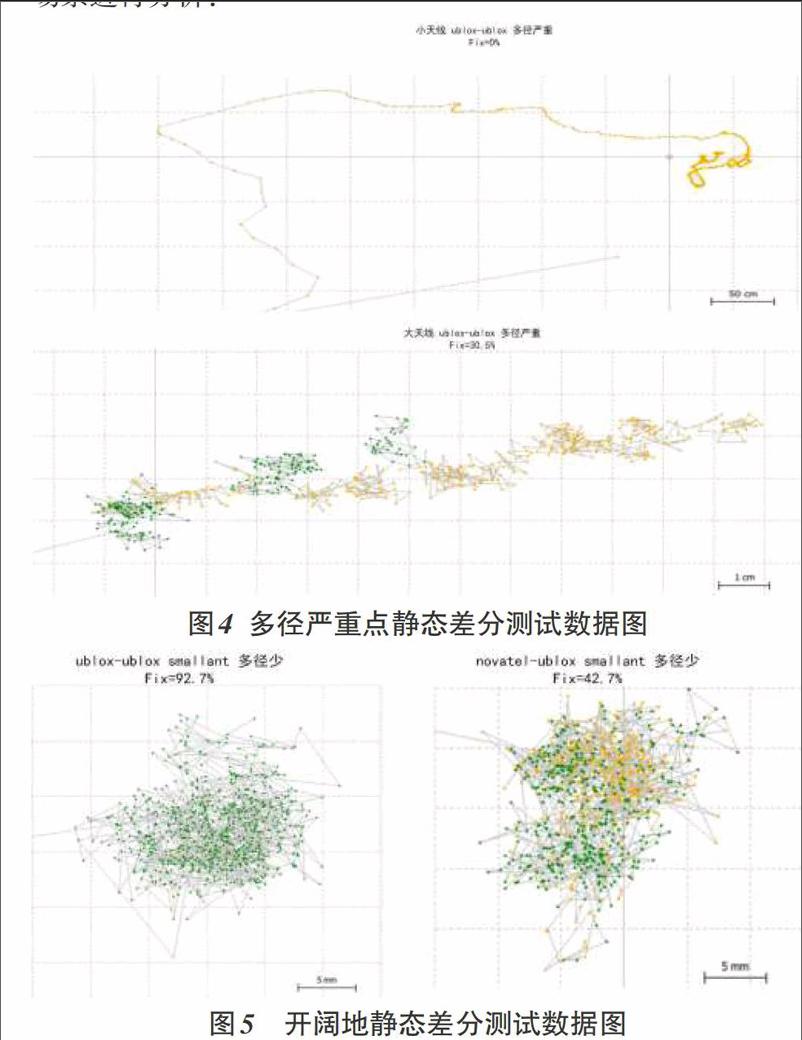
如图4所示,由于多径严重,小天线的抗多径能力很差,这给差分锁定带来很大困难,基本上无法进行载波相位的整数模糊度求解,而大天线虽然能克服一定的多径影响,但是在锁定的同时也带了很大的系统误差。
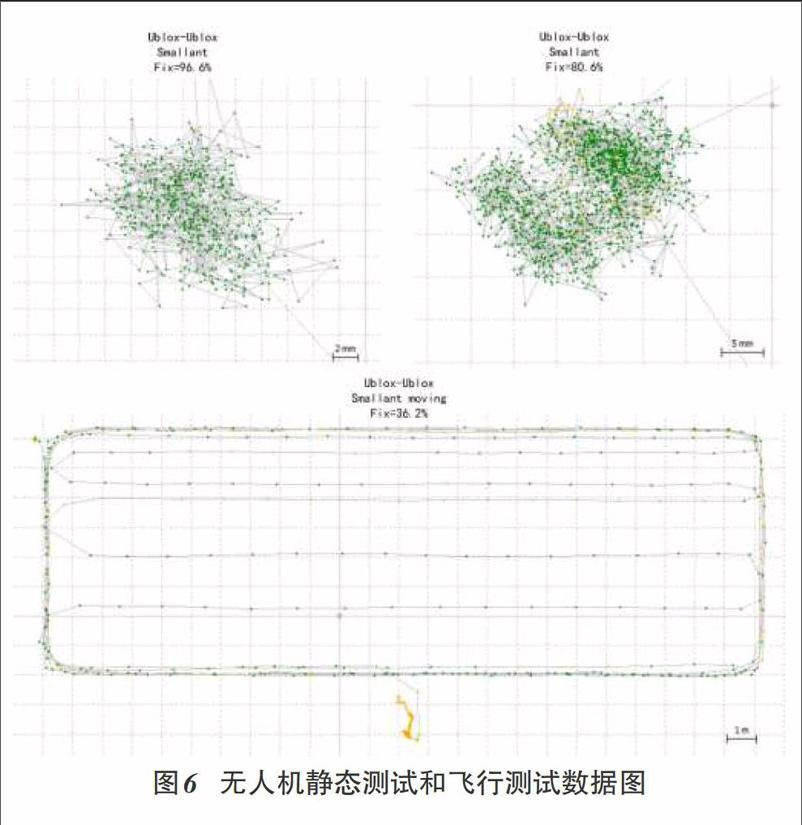
但是如图5所示,在空旷地点,多径干扰较少的情况下,使用我们开发的廉价差分基站和流动站系统,可以达到非常好的效果。因此此类无人机适宜在空旷的野外作业,不适合城市、峡谷等多径严重地区进行作业。图6的测试是无人机在空旷地带的作业定位精度图。
图6的上半部分是静止测试图,分别取两个点进行测试,可以看出,廉价的差分系统也能达到相当高的精度。下半部分是无人机飞行轨迹图,这是模拟典型的无人机喷农药的场景,由于加入了高精度导航,甚至可以做到对每一条农作物带进行农药喷洒。
3结论
本论文对自主研发的一款载波相位差分基准站系统进行了详细的对比分析,经对比,该便携基准站系统完全可以对无人机等移动平台进行高精度差分校准,具有明显的性价比。同时还对高精度导航系统在无人机平台的使用做了详细的测试和说明,可以给此类高精度应用做参考。
