基于solidworks motion的铅球收集器抓取机构的运动仿真分析
2017-05-31 02:17杨斌王鹏程
山东工业技术 2017年10期
关键词:运动仿真
杨斌+王鹏程


摘 要:研究了solidworks /motion运动仿真模块在机构动运所需的空间及行程、检查运动过程中是否存在干涉等方面的应用。在solidworks构件目标模型,针对铅球收集器中的抓取机构进行运动仿真,并通过调整推杆驱动时间速度和抓斗驱动力时间以实现推杆与抓斗协调运动效果,最后以图表形式输出构件的位移时间图,通过图表分析确定抓取机构的合理运行过程,为后续设备添加液气压动力系统提供参考。
关键词:抓取机构;干涉;运动仿真
DOI:10.16640/j.cnki.37-1222/t.2017.10.188
0 引言
传统上,对运动机构的多采用图解法、解析法、实验法等。但随着计算机软、硬件的发展,使计算机软件进行分析变得十分便捷和经济,同时由于计算机仿真技术得到的结果能够满足工程实践的要求,其高度的可靠性已经成为机构分析过程中不可缺少的环节。充分利用仿真技术进行运动学、动静力学析,能够为机构设计过程中存在的问题提供支撑。
本文先通过Solidworks建立铅球抓取机构各零件三维模型及装配关系,进入 motion模块建立运动仿真模型。通过调整相关参数以达到理想运动效果,确定出机构运行过程中所需条件,模拟实际工作状态下各构件的位移、速度情况。
1 Solidworks 軟件中motion模块简介[1]
Solidworks /Motion模块即运动分析模块,是基本Windows环境集参数化三维实体建模及装配、机构运动仿真、运动干涉检查、优化设计等功能于一体,提供了一个无缝的多功能应用分析平台。SolidWorks /Motion使用运动分析 精确模拟并分析装配体的运动,同时合成运动算例单元的效果(包括力、弹簧、阻尼以及摩擦)。其中在装配关系确定后,每个运动分析方式可独立进行,不会对装配关系产影响,并且跟据运动仿真结果可方便的修改三维实体,更新装配和运动仿真模型。
Solidworks 运动仿真分析的操作一般步骤可分为3个阶段进行:
(1)前处理步骤;创建分析模型,包括零部件三维模型的建立、装配模型的建立、仿真模型的建立(包括定义运动驱动、接触设置、键码设置等)。
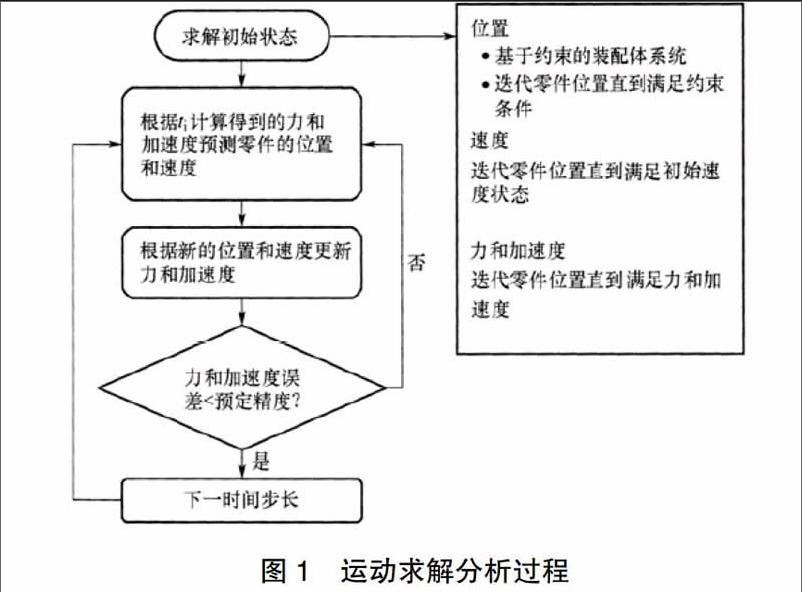
(2)运动求解分析过程;每个时间步长中,程序使用改进的Newton-Raphson迭代法进行求解。通过非常小的时间步长,根据零 件的初始状态或前一时间步长的结果,软件可以预测一下时间的状态。
(3)后处理步骤。解释分析结果并输出数据文件,转化成画机构运动、图表、力。
2 铅球抓取机构运动仿真分析
2.1 问题描述
抓取机构包括抓取推杆上下运动、抓斗合拢抓取运动。本实例主要是通过设置合适的各项参数,以协调两运动来完抓取功能。
2.2 机构建模
利用solidworks三维建模功能,分别建立各构件三维模型,并在装配模块中按配合关系建机构装配模型。具体如图2所示。
2.3 建立运动仿真模型
关键步骤[2]:
(1)生成一个运动算例:新建一个运动算例。
(2)添加二个线性马达:马达用于驱动机构运动,并设定驱动参数,使推杆以一定速度移动。如图3、4所示。
(3)添加引力:添加一个标准重加,确保运动过程中机构重加也被计算在内。
(4)添加各机构的重量:机构的重量相对于支撑添加一个向下的力。
(5)添加接触:在抓斗与铅球之间添加一个接触设置。
(6)设置仿真时间23s:将结束时间帧拖至时间轴的23s处。
运动分析方案创建,检查关键步骤信息。通过设置运动算例属性窗口中每秒帧数来调整计算精确度。
2.4 计算运动仿真
单击计算运动算例图标,开启运仿真分析过程。对两运动机构进行动力学分析计算[3]。计算完成单击播放按钮,以动画形式观察两运动机构运动情况,如发现推杆上下运动、抓斗抓取运动不协调,则可通过设置推杆驱动时间速度、抓斗驱动力时间来实现。
调整完毕的仿真结果亦可以通过图表的形式绘制出来。通过单击结果和图角按钮计算结果并生成表图表,进入选取窗选取推杆和抓斗位移作为y轴、时间作为x轴,具体仿真结果,如图5、6所示。
3 结束语
从仿真结果可以看出,推杆的驱动速度与抓斗的驱动力在时间上是相协调的。从初始位置开始,经过8s左右,推杆达到最远行程时,抓斗下降至最低处,同时进行2秒左右的抓取动作;随后推杆和抓斗回程。在整个过程中,抓斗和推杆实现空载快速进程,负载慢速回程,整个动作和谐连贯。通过运动仿真可以确定机构动运所需的空间及行程、检查运动过程中不存在干涉等现象。
本例通过利用运动仿真中动画功能,初步观察铅球收集机构运动中各机构运动,并通过调整相关参数以达到理想运动效果,确定出机构运行过程中所需条件。最后以图表形式输出构件的位移时间图,为该机构后续添加液气压系统以及该机构的最终应用提供了理论依据。
参考文献:
[1]陈超祥,胡其登. Solidworks Mothion 运动仿真教程[M].北京:机械工业出版社,2014.
[2]寇会民,刘春东,姚家祥,常兆麒.基于SolidWorks Motion的压床机构运动仿真分析[J]. 科技创新与应用,2015(30):64-65.
[3]李大磊,丁天涛,程建民,李宁.基于SolidWorks Motion的空间摆动机构的运动分析[J].制造业自动化,2011,33(22):70-71.
基金项目:遥控铅球运送车设计(EKY2010002)
作者简介:杨斌(1970-),男,天津人,硕士,副教授,主要研究方向:自动化。
猜你喜欢
科技创新与应用(2017年6期)2017-03-23
山东工业技术(2017年3期)2017-03-16
教育教学论坛(2016年52期)2017-03-12
汽车科技(2016年6期)2016-12-19
科技视界(2016年17期)2016-07-15
科技视界(2016年10期)2016-04-26
现代电子技术(2015年8期)2015-07-09