
汽车纵向主动避障系统研究
2017-05-30 10:48陈文韬刘志斌丁嘉浩姚森
时代汽车 2017年10期
陈文韬 刘志斌 丁嘉浩 姚森
摘要:随着科技发展,如今汽车的研究热点已经转移到了无人驾驶智能车上。不同于一般的减少驾驶员误操作的主动避障预警系统研究,本文从乘坐舒适性角度出发研究目前国内外广泛采用的三种安全距离模型,并用carsim和simulink进行联合仿真,对其优劣进行评定。在此基础之上搭栽合适的控制器建立自适应巡航模型并进行仿真测试。
关键词:主动避障;乘坐舒适性;安全距离;自适应巡航
1.引言
随着科技发展,无人驾驶智能车无疑是现今车辆工程领域的热点。汽车的行车速度越来越快,流量逐日增加,交通安全问题日益严重。一方面各国政府出台大量相关法律法规,规范驾驶行为。另一方面,ESP、ACC等主动安全系统的使用也逐渐增加。现今主动安全系统研究出发点多是降低驾驶员的操纵失误,以及特殊情况下的紧急制动。本文从无人驾驶的乘坐舒适性角度出发设计出了适合于无人驾驶的主动安全系统。
2.总体方案
2.1无人驾驶主动避障系统功能要求
(1)当自车与前车距离较远或前车车速大于巡航车速,以巡航车速行驶;(2)当自车与前车之间距离过近且前车车速较低,对前车车速进行跟随;(3)当两车间距低于安全距离,在保证安全的情况下,避免急刹,提高乘坐舒适陛。
2.2模型整体组成
从功能要求入手,模型需要车辆传感系统输入自车车速、发动机转速、相对速度、相对距离,避障控制器进行安全距离计算和决策,将期望加速度传给控制对象,经过逆动力学模型计算所需制动压力和节气门开度返回控制车辆。
3.系统建模
3.1车辆纵向动力学建模
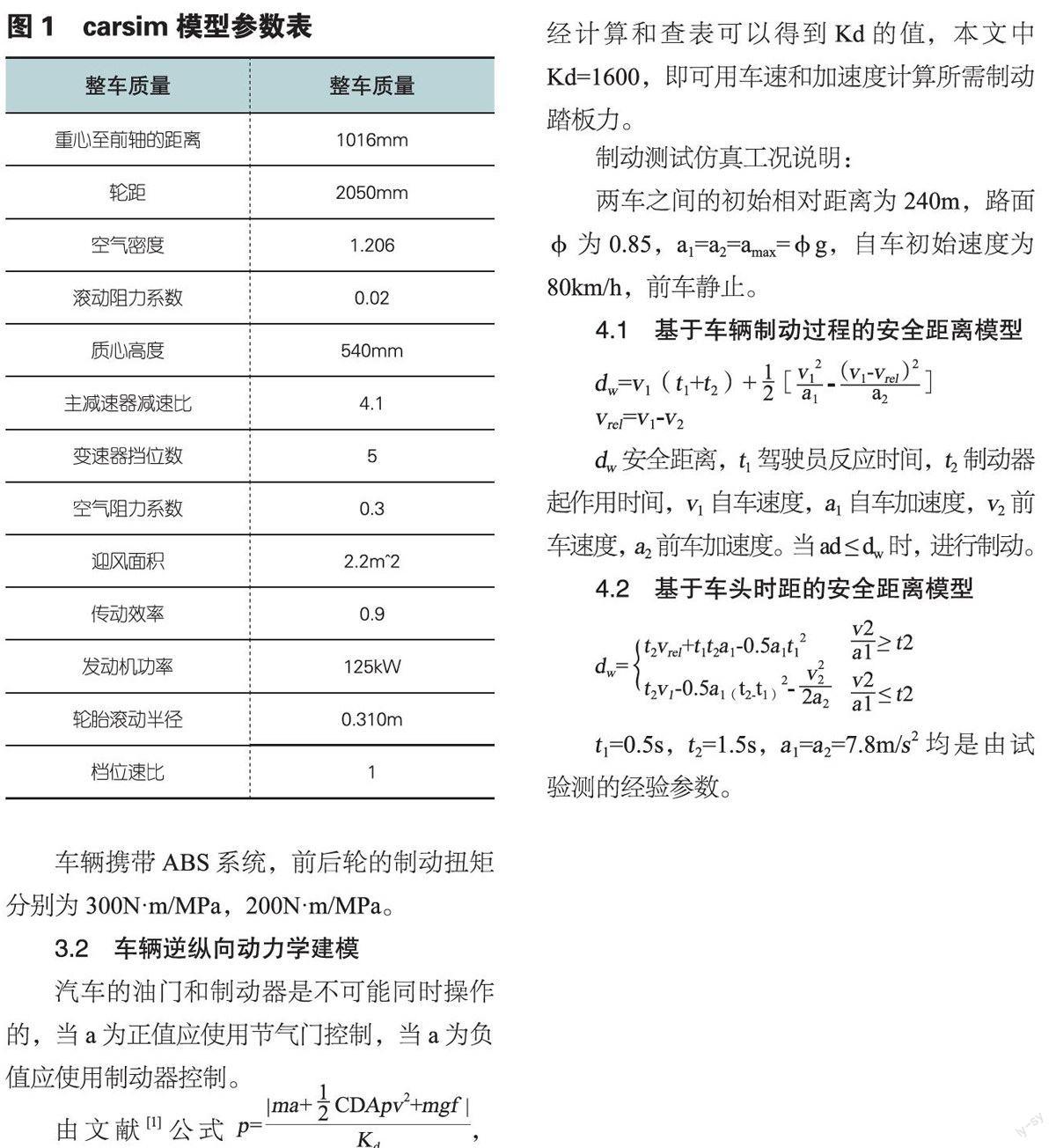
Carsim是专门针对车辆动力学的仿真软件,仿真运行速度快。主要用来预测和仿真汽车整车的动力性、制动、经济性等。在caisim里面可以方便的设置整车参数,图1是本研究所使用的整车模型参数。
车辆携带ABS系统,前后轮的制动扭矩分别为300N.m/MPa,200N.m/MPa。
3.2车辆逆纵向动力学建模
利用earsim中自带的发动机模型的节气门开度图,可以得到以发动机转速和期望力矩为输入,节气门开度为输出的2-Dlookuptable。期望力矩可以用加速度和車速计算。
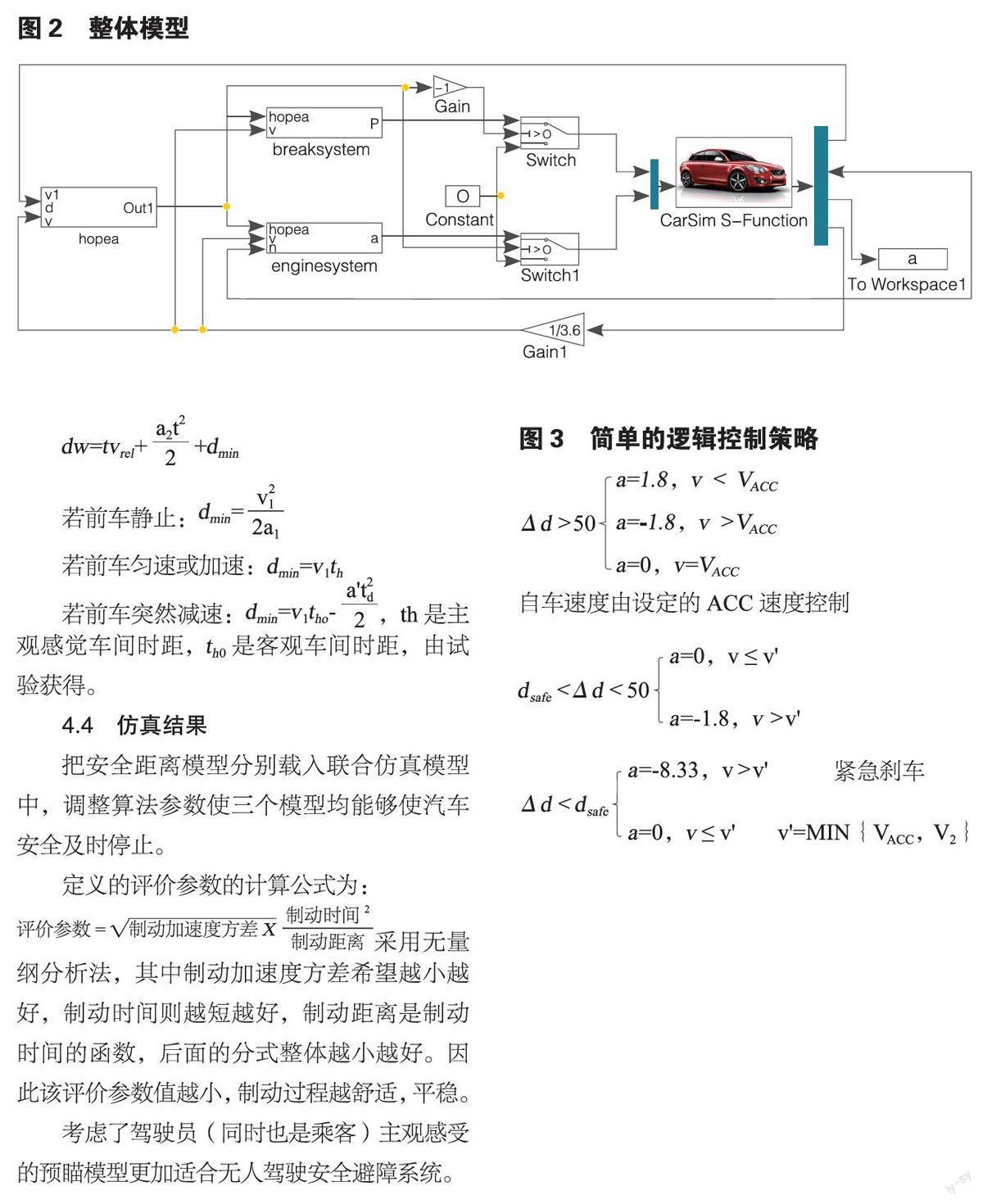
将模型搭建在一起,如图2。
4.安全距离算法
本文对目前较为成熟的三种安全距离模型进行了制动研究,在确保安全性的前提下,选出较为舒适的算法。
考虑了驾驶员(同时也是乘客)主观感受的预瞄模型更加适合无人驾驶安全避障系统。
5.控制器
上位控制器的算法有神经网络,遗传,蚁群等,算法越复杂控制效果越好,但是时效性就越差。汽车作为一种高速运动物体,需要一种能够在稳定性和时效性之间取得平衡的控制算法。因此选择工业上大量使用的PID和模糊控制作为研究对象。
5.1简单逻辑控制
其中50m是人为设定的绝对安全距离,dsafe是驾驶员预瞄模型计算出来的必须进行急刹的安全距离,1.8m/s2是由文献3提出的乘客无感觉加速度值,VACC设定为60km/h。
5.2PID控制
PID控制策略与5.1相同,只是在模型中搭载了PID控制模块。关于PID控制的原理可以见文献4。
先将原模型进行开环得到阶跃输入下的输出值,用系统辨识模块得到开环系统的拟合传递函数,采用临界比例带法进行参数的初整定。
PID控制器在搭载了微分项后计算时间大为延长,从时效性的角度出发,最终采用PI控制。
5.3模糊控制
模糊控制是一种适用于非线性、时变、滞后、模型不完全系统的控制,不依赖于被控对象的精确数学模型,而是利用控制法则来描述系统变量间的关系。是一种较理想的非线性控制器,具有较佳的鲁棒性、适应性及较佳的容错性。
本文以两车实际距离与理论安全距离之差和相对安全速度作为模糊控制的输入语言变量,输出语言变量选为加速度,分别进行量化,确定隶属函数。并根据专家经验以及过程控制知识来生成控制规则,对输入语言变量的不同模糊子集,分别对应各自的输出语言变量的模糊子集,形成模糊控制的规则表。
5.4仿真分析
为了出现前车高于和低于自适应巡航速度两种情况,仿真工况设置为:前车以72km/h的初始速度匀减速,减速度为0.5m/s2,以跨过60km/h,并且在40s时停车。自车初速度为60km/h。初始相对距离为100m。并分别搭载有简单逻辑控制逻辑、pid控制器和模糊控制器。
前车停止,自车保持着一定的安全距离也停止,并且避免了紧急刹车的情况。在搭载简单的逻辑控制情况下,加速度跃变输出,波动较大,并且最终停止时与前车之间的距离也较大。搭载了PI控制器后,加速度稳定性提高,但出现了0.8g的急刹加速度。而搭载了模糊控制器之后,加速度稳定性和最大值均有所改善。
当改变仿真工况参数进行测试时,均能达到预期要求,系统具有良好的鲁棒性。
6.结语
本文提出基于乘坐舒适性的主动安全系统,通过联合仿真比对三种安全距离模型的刹车性能的优劣,并利用不同的控制方式对自适应巡航进行仿真,从而得到基于乘坐舒适性的适合于无人驾驶的自适应巡航系统。上位控制使用模糊控制器,安全距离采用基于驾驶员预瞄的距离算法,得到的主动安全系统具有良好的跟车性能,且能够进行平稳的停车。
