Mecanum全向自导引小车的移动控制研究
2017-05-30 10:48何骐名
时代汽车 2017年3期
关键词:控制算法
何骐名

摘 要:将Mecanum四轮轮系结构的应用在自动导引小车(AGV)上。AGV便具有全向的平移和旋转的能力。本文分析研究了其运动学原理,并设计了对应的控制器。最后通过仿真验证了控制算法的可行性。
关键词:自动导引车;全向轮;控制算法
1 引言
自动导引车(Automatic Guided Vehicle),简称AGV。AGV是一种能够沿指定路径,自动行驶的车辆。Mecanum是一种全向轮。应用时,Mecanum轮组合使用和控制。这样可以使车体产生运动平面内的任意方向移动和转动[1]。
将Mecanum轮运用在AGV上,能够实现AGV的全向平移与旋转。这样能够使AGV的运动以及路径的规划有更多的选择的可能。所以本文简单设计了使用Macanum轮的自动导引小车。并使用Matlab中的Simmechanis对其进行了移动控制的研究与仿真。
2 AGV基本结构
Mecanum轮需要组成一定轮系结构才能起作用。通常采用三个或四个轮子。本文中的AGV采用的是四轮结构。全方向轮外形类似于斜齿轮。轮齿为可以转动的鼓状辊子。这也是这种轮子的独特之处。小辊子的轴线与轮子轴线有一定夹角。辊子和车轮转动时相互作用。这就是全方位移动实现的关键。
Mecanum轮把转向力转化成轮子的法向力。各个轮子的速度与方向都不同。所以在任何要求的方向上,都能合为所需合力矢量。从而获得全向移动的能力。但这个过程不影响轮子的固有方向[2]。
AGV运动学方程如下:
其中
代表各轮的转速,
和
分别代表AGV的长和宽的一半。
和
是AGV的平动速度,
是AGV的旋转速度。
本文中该AGV为四驱移动平台,配备4个全数字直流伺服驱动器分别驱动四个电机。这四个驱动器通过CAN总线连接在一起,主控板通过CAN总线可同时向四个驱动器发送数字指令。控制系统协调四个车轮的转速和转向。这样就完成各种平移及转向动作。
3 控制系统设计
AGV有别于其它车辆,最主要在于其能自动寻径,而这是通过识别路径上的信息媒介物实现的,当偏差一旦出现,就需要及时纠正。纠正是否及时,效果是否良好,关键是依赖所使用算法。目前所采用的算法有常规PID,改进型PID,模糊控制。
AGV沿着设定的路径运行,通过自身的传感器来确定自身的角度和方向。通过传感器得到测出自身位置信息。再综合设定的规定路径。得到测量位置和规定路径的偏差。将它输入PID控制器中,这样得到小车的设定值。再经过一定速度补偿,最后通过麦克纳姆轮的运动学方程,得到各个车轮转动的角速度。通过调整各个车轮角速度,来完成对车体地控制。同时车体的运动通过传感器测量出来,再反馈给PID控制器。整个控制系统成为一个闭环。
4 PID控制器的设计
PID控制,又称PID调节。指的是比例、积分、微分控制。在工程实际中,它被应用得最为广泛[3]。PID控制器问世至今已有近70年历史。因其稳定性好、可靠性高、适用范围广而成为常用的工业控制技术。当被控对象的多种信息不透明,例如参数不明确、没有精确的数学模型与之对应等,控制器的参数依赖于经验及现场多次反复调试而整定。当被控对象对外是个黑盒子的时候,PID控制是最为可行且经济的控制方式。它不需要精确的系统模型。通过设定
、
、
即可实现对系统的控制。比例控制是将输入的偏差按照一定值缩放。如只有它,易使系统输出有稳态误差。积分控制和积分项有关。它通过积分项来增大输出。这样就能削弱稳态误差的影响。微分控制是利用微分项来及时调整误差,避免过大的超调量,有效改善大惯性和滞后的控制对象的动态响应。
PID控制的传递函数如下:
5 simulink仿真
為了对所设计的控制器进行验证,我们选择先在simulink中的SimMechanins工具箱进行仿真验证。
首先对AGV小车进行简化建模,建模如图1。
6 仿真结果
仿真时,AGV小车x方向初始速度设置为2,y方向设置为0,1秒后开始调整速度。再让四个轮子的转速相等,按运动学方程可知,小车应该延x方向匀速直线前行。仿真结果为,x方向速度由初始速度改变为设定值。y方向的速度保持为0。小车的轨迹也是在x方向前行,符合期望。
然后,我们设定1轮和3轮的速度相等,设定2轮和4轮的速度为0。同样,设置初始速度为x方向,1秒后开始调整速度。由运动学方程可知,小车开始延x方向前行,然后应该延与x和y方向成45度的角度直线前行。通过仿真,可以看到,在一秒之后,x方向上的速度由2减少到设定值。y方向上的速度也从0变化到了设定值。小车的轨迹也符合期望的运动。
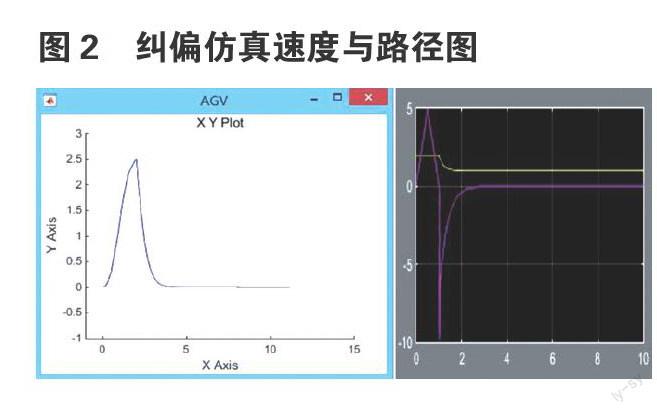
之后,让AGV设置为延固定路径行进。并给AGV设置一个y方向的滑动,同样在1秒之后开始调整。仿真结果如下图。可以看到AGV很快就调整回了原来的轨迹。同时y方向和x方向的速度也按设定的值运行。
纠偏
7 结语
本文简单设计了一种全向AGV小车。小车采用四轮麦克纳姆轮结构。并研究了其对应的控制系统及控制策略。再通过仿真对控制算法进行了验证。
参考文献:
[1]王兴松. Mecanum轮全方位移动机器人技术及其应用[J]. 机械制造与自动化,2014(3):1-6.
[2]姚冬冬.三轮全向移动机器人Multi-agent软件系统研究与设计[D].武汉科技大学,2013.
[3]刘仁发.浅谈PID在工业自动控制中的应用[J].城市建设理论研究:电子版,2011(21).
猜你喜欢
纺织科学研究(2020年1期)2020-05-21
电镀与环保(2018年2期)2018-04-19
制造技术与机床(2017年6期)2018-01-19
江西理工大学学报(2015年3期)2015-12-22
计算机工程(2015年8期)2015-07-03
电源技术(2015年9期)2015-06-05
电测与仪表(2014年14期)2014-04-04
电视技术(2014年19期)2014-03-11
单片机与嵌入式系统应用(2014年9期)2014-03-11
组合机床与自动化加工技术(2014年12期)2014-03-01