无人机倾斜摄影在地质灾害三维可视化中的应用
2017-05-25 00:37杨娟
中国锰业 2017年2期
杨 娟
(重庆第二师范学院,重庆 400065)
无人机倾斜摄影在地质灾害三维可视化中的应用
杨 娟
(重庆第二师范学院,重庆 400065)
无人机倾斜摄影测量是摄影测量学科中的新兴技术,是目前国内外研究的热点。结合实际工作,对无人机倾斜摄影测量在地质灾害三维可视化模型构建中的应用进行可行性研究,为快速实现地质灾害三维可视化分析、安全性评估以及灾害发展与影响模拟,建立地质灾害模拟预警系统等防灾减灾工作提供技术和决策支持。
无人机倾斜摄影;地质灾害;三维可视化
0 前 言
随着人类活动工程的加剧,地质灾害与地质环境问题日渐严重,全面快速地获取地质灾害信息,建立地质灾害预警预测体系,是维护人类生命财产安全和经济建设的迫切需要。目前国内的灾害监测和预警还停留在比较初级的阶段,大多依靠经验,灾害监测图也都是数字、曲线,很少有实景演示,实际应用中有很大局限性。随着计算机技术、自动化技术、图像处理技术以及人工智能等技术发展,三维可视化技术已逐步应用到基建、环境、资源调查等领域,国内外学者也进行了大量研究[1-2]。无人机倾斜摄影测量是摄影测量学科中的新兴技术,是目前国内外研究的热点,通过在同一飞行平台上搭载多台传感器,同时从垂直、倾斜等不同的角度采集影像,获取地面物体更为完整准确的信息,倾斜模型具有直实的纹理,建立的三维模型更直实,而且速度快,成本低[3-4],目前无人机技术和倾斜摄影技术在城市三维建模、环境资源调查和地质灾害的应用逐步深入,并积累了一定经验[5-10]。本文结合实际工作,对无人机倾斜摄影测量在地质灾害三维可视化模型构建中的应用进行可行性研究,为建立地质灾害模拟预警系统等防灾减灾工作提供技术和决策支持。
1 系统构建
1.1 无人机系统
系统硬件包括八轴碳纤折叠式旋翼机,DJI WooKong-M飞行控制器,DJI 900 Mhz电台,IOSD MARK II,LIPO电池(6 S,30 000 mAh),地面监控系统为DJI Groud Station 4.0和Futaba 14SG,硬件系统主要技术指标如下:飞行器轴距1 045 mm,电机4 114 kV400,浆叶45.72 cm,起飞重量9.62 kg,垂直速度2 m/s,水平速度12 m/s,飞行高度150~500 m,安全航时25 min。
经实际航摄工作验证该无人机系统主要具有以下优点:a成本低,结构简洁,模块化强,便于维护;b机体轻便,可折叠,便于运输携带,比较适合小面积地质灾害山高坡陡的地形条件;c旋翼机飞行稳定,机体震动小,飞行俯仰角和滚转角小,相机外方位元素较稳定;d旋翼机抗风性较优,有效避免山谷紊流影响,飞机容错力强,安全性高。不过由于电池、材料、电机等性能限制,该无人机系统还存在动力有限,速度慢,续航短,单架次有效航摄区域小的缺点,不过普通地灾体量较小,可避免以上缺陷。
1.2 数据采集系统及检校
受成本和重量限制,无人机搭载多倾斜摄影使用非量测型数码相机作为数据采集设备,其内方位元素未知,物镜畸变较大。在获取航摄影像之前,需对非量测的数据码相机进行检校,获取相机内方位元素,以提高倾斜摄影软件处理速度和成果精度。目前,采用布郎畸变模型和纯平LCD相机检校法,可快速取得稳定的检校参数。数码相机布朗畸变模型如下:
x=X/Z
y=Y/Z
x′=x(1+K1r2+K2r4+K3r6)+P1(r2+2x2)+
2P2xy
y′=y(1+K1r2+K2r4+K3r6)+P2(r2+2y2)+
2P1xy
u=cx+x′fx+y′skew
v=cy+y′fy
其中:r=sqrt(x2+y2),X、Y、Z是相机坐标,u、v是检校转换后坐标,f焦距,cx、cy是像主点坐标,K1、K2、K3径向畸变系数,P1、P2是切向畸变系数,skew是x和y夹角系数。LCD检校法是大屏以幕纯平的棋盘矩阵作为检校目标,通过相机多角度拍摄获取足够数量和的照片,利用软件自动相机检校参数。检校时需注意在拍摄时应保持相机焦距与作业时保持一致并恒定不变,检校矩阵应覆盖整张照片,并保证相片避免显示器辉光及其他光源影响,防止爆光过度,使照片具有最佳的清晰度,为使检校矩阵边界更加明晰,可对拍摄的照片进行必要的对比度和锐度进行调整,便于软件计算并取得更准确的检查成果[11]。照片拍摄效果如图1。

图1 检校矩阵和相机拍摄效果
本次使用北京观著五拼倾斜摄影相机,图像分辨率7 140×5 360,像元尺寸0.001 4,侧视镜头倾角40(°)。通过足够数量和精度的照片,利用agisoft lens软件多次检校比较,直到获得稳定的参数作为相机内方位元素,经计算倾斜摄影测量数码相机相关参数如下:f=7.929 3,cx=3 565.549,cy=2 802.299,K1=0.246 3,K2=-0.663 2,K3=0.533 4,P1=0.314E-6,P2=-0.141E-6。
1.3 软件处理系统
Smart 3D capture是一套基于图形运算单元GPU的快速三维场景运算软件,他能无需人工干预地从简单连续影像中生成实景真三维场景模型[11]。通过摄影测量原理,可以将多种源数据、分辨率、任务数据量的照片转化为高分辨率的、带有图像纹理的三维网络模型。具体通过对获得的倾斜影像进行同名点选取、多视匹配、三角网构建、自动赋予纹理等步骤,最终得到三维模型。
2 数据采集、处理与分析
2.1 数据采集
本次开展倾斜摄影地灾体位于三峡库区万州区,航摄区域内最高海拔460 m,最低海拔约250 m,相对高差210 m,航摄范围约400 m×600 m,拍摄天气多云,拍摄时间上午11∶00~11∶30。航线按矩形等高设计,航高与地形最高点相对海拔200 m,按相机内方位元素计算,地面分辨率35~72 mm。由于高差大,地形坡度陡,为尽量获取地表信息,采用66%旁向重叠和80%航向重叠拍摄。由航线设计软件生成飞行计划文件,该文件包含飞机的航线坐标及各个相机的曝光点坐标位置,各个相机根据对应的曝光点坐标自动进行曝光拍摄。
2.2 数据处理
航摄完成后在现场应将航摄获取的倾斜摄影原始照片数据按不同方位的相机分别整理,检查照片质量、数量,如出现漏拍应及时补拍。通过IOSD数据下载和读取,获取各拍摄时点无人机姿态参数,包括飞行坐标X、Y、Z、omega、phi、kappa,通过倾斜摄影相机与IOSD固件参考关系,可计算得到各照片拍摄时点初始姿态信息。
按Smart 3D capture软件格式要求将数据整理好后,首先创建一个工程,将存放在不同目录中各方位相机照片导入工程,在导入的照片组中,需要输入拍此相片相机的内文位元素,包括传感器尺寸、镜头焦距、像主点、畸变参数等,所有照片组信息应按规定格工填写在BLOCKSEXCHANGE.XML文件中。
设置好导入信息后,默认情况下系统重建使用ENU坐标系统,即在模型中心设置原点,重建坐标系统用来设定模型区域和切瓦片依据,而生产项目最终输出的三维模型坐标系由另外的坐标系统进行定义。要获得模型地理空间定位信息可以有两种方式:a使用照片位置属性,各照片所带方位属性决定;b参照控制点精确配准,由于无人机携带POS精度不高,初始空中姿态并不十分准确,因此要获得高精度的倾斜三维模型。建议引入实测控制点,人机交互输入后再进行空三加密。
软件在执行空三过程中,可以有不借助输入初值计算、利用初值计算、容差范围内调整初值计算和保持使用初始值但不参与计算几种模式,一般来讲针对位置和姿态在公差范围内保持和调整针对无人机数据精度提高具有重大的作用,但运算较为复杂,耗时也较长。当输入照片重叠度不足,或信息不准确时,照片会发生丢失的情况,可以在修改相关属性后,重新提交空三计算,或将当前空三成果作为中间成果,在此基础上计算新的空三运算,在必要的情况下,需要人工增加新的地面控制点作为空间参考进行空三运算。
当空三执行完毕,经检查质量符合要求后,可将成果导出来XML或KML文件,或导入PHOTOMESH软件中进行三维重建。具体流程如图2。
利用Smart 3D capture空三运算成果,可输出DSM、真正射影像、密集点云、三角网、真实纹理的三维数据成果。
2.3 精度分析
由于地形限制,暂无条件在危岩体上布设控制点并开展精度检验测量,因此选择了一片地势相对平缓的新开发地块开展无人机倾斜摄影建模精度分析。航摄区域约500 m×600 m,根据地形条件布设20个控制点并采用RTK测量获得三维坐标,其中选取8个作为建模精确控制点,其余12个作为验证点。经计算,控制点与模型量测点坐标误差如表1。
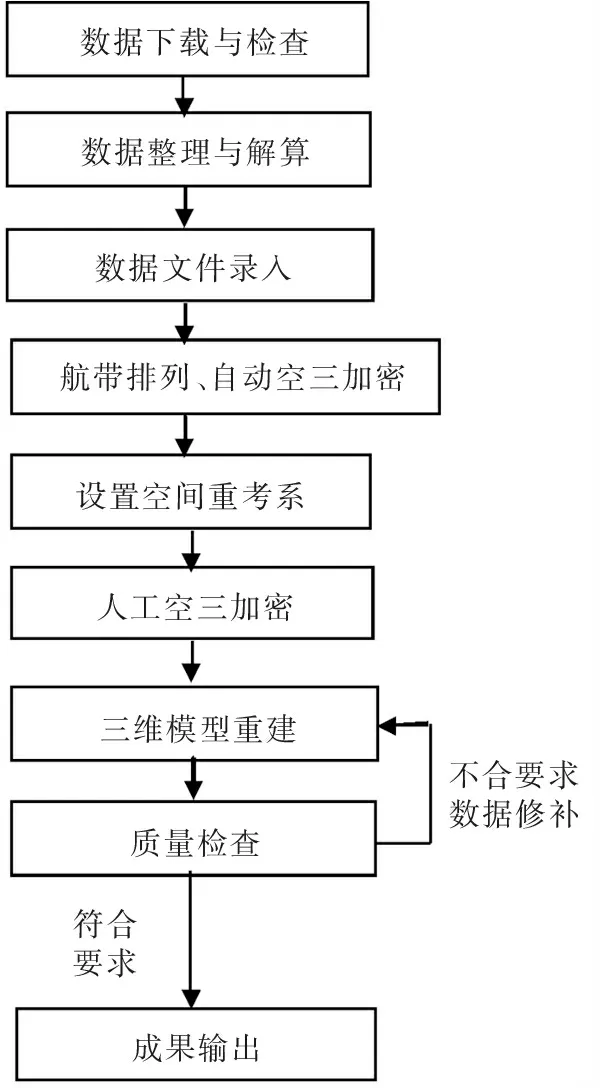
图2 建模流程
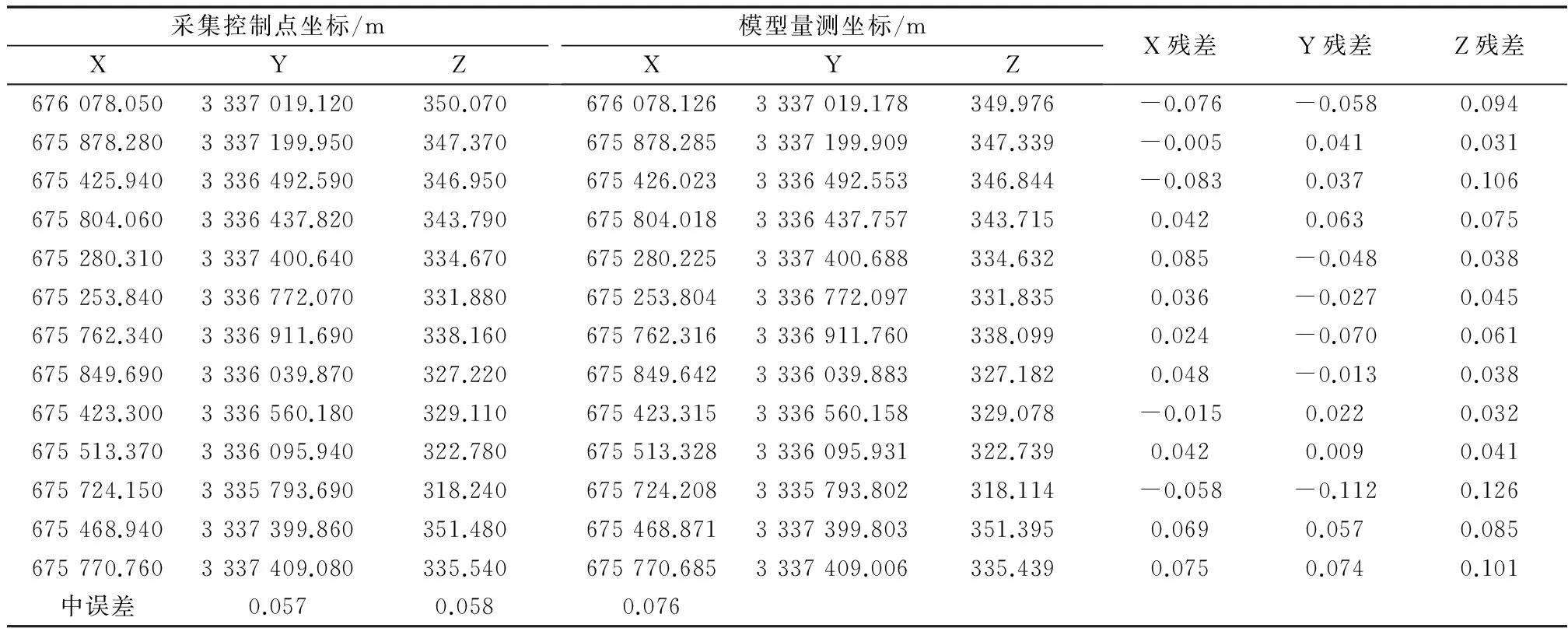
表1 控制点与模型量测点坐标误差
从表1可以得到,无人机倾斜摄影开展三维建模成果能够满足1∶500~1∶1 000比例尺测绘精度要求,可为地质灾害可视化监测和测量提供基础数据。
3 结 语
利用倾斜摄影技术生成高分辨率纹理的三维模型,在计算机中实现地质灾害体真实场景再现,可为地质灾害的管理工作带来革命性的改进。
1) 建立地质灾害三维模型,使得地灾信息表达、传递、沟通更加真实直观,降低了专业门槛,有利于领导和各行业专家发挥多方智慧共同会商决策。
2) 通过与GIS软件相结合,将原来以点、线、表格存储的地质灾害信息,可以用三维模型为基础建立地质灾害三维空间数据库,实现钻孔、防护整治设施、治理工程三维建模,并根据钻孔岩芯、部面地屋和地质测量资料,模拟生成三维数字地质灾害体构造地层格架,对地灾体内部进行全方位分析。
3) 在构建三维数字地质灾害数据库基础上,可实现对地质灾害体感兴趣区域的信息查询,任意切割制作地质剖面图、平面图等,并对地质灾害体局部或全面的面积和体积(容量)计算,为地质灾害的发生、演变提供决策和技术依据。
4) 通过三维模型中各部位分析与岩体力学结构、抗滑系数、动力学模型等相结合进行可视化表达和计算解析,建立地灾仿真预警系统,对各类地质灾害体及灾体内各部位进行数学和力学仿真分析,快速实现地质灾害三维可视化分析、安全性评估以及灾害发展与影响模拟。
[1] 金丰年, 孔新立, 翁杰, 等. 在于三维地理信息系统的块体稳定可视化分析系统[J].岩石力学与工程学报, 2006, 25(2): 3650-3653.
[2] 王威, 周平根, 李昂. 基于三维可视化的地质灾害体监测预警信息系统[C]. 全国第五次地质灾害防治学术大会, 2013.
[3] 王伟, 黄雯雯, 镇姣. pictometry倾斜摄影技术及其在3维城市建模中的应用[J]. 测绘与空间信息, 2011, 34(3): 181-183.
[4] 曲林, 张淑娟, 冯洋, 等. 倾斜摄影测量高中低空解决方案研究[J]. 测绘与空间地理信息, 2016, 39(1): 19-23.
[5] 文雄飞, 张穗, 张煜, 等. 无人机倾斜摄影辅助遥感技术在水土保持动态监测中的应用潜力分析[J]. 长江科学院院报, 2016, 33(11): 93-98.
[6] 朱国强, 刘勇, 程鹏正. 无人机倾斜摄影技术支持下的三维精细模型制作[J]. 测绘通报, 2016(9): 151-152.
[7] 谭仁春, 李鹏鹏, 文琳, 等. 无人机倾斜摄影的城市三维建模方法优化[J]. 测绘通报, 2016(11): 39-42.
[8] 王琳, 吴正鹏, 姜兴钰, 等. 无人机倾斜摄影技术在三维城市建模中的应用[J]. 测绘与空间地理信息, 2015, 38(12): 30-32.
[9] 吴楠, 韩东. 无人机摄影测量在库区地质灾害安全检查中的应用[J]. 四川地质学报, 2016, 36(2): 316-319.
[10] 丁亚洲. 无人机倾斜摄影技术在特高压输电线路路径优化中的应用研究[J]. 低碳世界, 2016(24): 101-102.
[11] 刘洋. 无人机倾斜摄影测量影像处理与三维建模的研究[D]. 上海: 华东理工大学, 2013.
An Application of Oblique Photography in 3D Visualization of Geological Hazards
YANG Juan
(ChongqingUniversityofEducation,Chongqing400065,China)
Oblique photogrammetry of UAV is a new technology in photogrammetry. It is a hot spot of research at home and abroad. Combined with practical work, this paper makes a feasibility study on the application of obliquePhotogrammetry in the construction of 3D model of geological hazard. In order to realize the 3D visualization analysis, including safety assessment, disaster development and impact simulation, we try to provide technical and decision support for disaster prevention and mitigation.
UAV tilt photography;Geologic hazard;3D visualization
2017-01-15
重庆市教委科学技术研究项目(KJ14011408);重庆第二师范学院科研项目(KY201336B)
杨娟(1978-),女,福建政和人,副教授,研究方向:灾害与区域可持续发展,手机:13637905606,E-mail:516407107@qq.com.
P694;P23
A
10.14101/j.cnki.issn.1002-4336.2017.02.044
猜你喜欢
世界科学技术-中医药现代化(2022年3期)2022-08-22
师道·教研(2022年1期)2022-03-12
全球定位系统(2021年1期)2021-03-26
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
海洋信息技术与应用(2020年1期)2020-06-11
初中生世界·九年级(2020年2期)2020-04-10
传媒评论(2019年4期)2019-07-13
电子制作(2018年17期)2018-09-28
北京航空航天大学学报(2017年4期)2017-11-23
安全(2015年6期)2016-01-19