逆变电源数字PWM响应时间延迟探讨
2017-05-24 08:38丁长健孙恩林
船电技术 2017年4期
丁长健,孙恩林
逆变电源数字PWM响应时间延迟探讨
丁长健,孙恩林
(1.中海油能源发展股份有限公司,天津300000 )
随着微处理器技术的快速发展,基于DSP数字芯片的数字PWM控制器系统广泛地应用于电力电子变换装置中。但与此同时,数字PWM控制器所带来的输出响应时间延迟问题也逐渐为电力电子工程师们所重视,特别是对于大功率电力电子变换装置,由于开关频率受到限制使得这部分时间延迟显得尤为突出。文中详细分析了数字PWM控制器及滤波器和补偿回路对逆变器响应时间延迟的影响机理,并利用matlab软件和数学分析方法详细分析了逆变器的响应时间延迟,最后,通过实验数据验证了理论分析方法和结果的正确性,为时间延迟的优化工作提供了理论指导。
数字脉冲宽度调制 逆变器 响应延迟 分析
0 引言
随着船舶电力推进系统的发展,推进系统的负载功率不断增加,多种形式的脉冲大功率负载对船舶电站功率提出了更高的需求,中压交流(直流)综合电力系统逐渐成为船舶电站发展的主流趋势[1]。于是,船上变频器、逆变电源等变流装置都呈现出高压、大电流的特点,而这些电气特性决定了其功率器件IGBT的开关频率不能过高[2],否则会因为开关损耗过高而烧毁器件或导致变流器效率低下,而采用数字PWM控制方式,因离散化过程中采样频率往往等于功率器件开关频率。因此,由采样间隔时间过长导致的逆变电源装置性能下降,跟踪响应时间延迟变大等问题就显得越发的突出和不可忽视[2,3]。
于是,为了优化船舶大功率逆变电源的输出响应特性,使其能够满足系统性能需求,本文对影响逆变电源输出响应时间延迟的主要因素进行详细分析,为系统优化工作提供理论基础。定义输出电压时间延迟为从给定电压信号到电源输出电压达到给定值50%所需的时间。
1 逆变电源主电路及控制系统
逆变电源主电路采用H桥结构,主电路及系统控制框图如图1所示,调制方式为单极性倍频PWM,控制器采用以DSP为核心的数字PWM控制方式。图1(b)中,AD采样、转换及保持过程的时间延迟在1 μs以内(约为500 ns),数字PWM脉冲驱动器Concept的时间延迟为300 ns,逆变器IGBT(FF600R06ME3)开通时间t和关断时间t分别为0.12 μs和0.73 μs,PWM驱动脉冲从驱动器输出到IGBT的传输延迟为数μs,这些时间延迟都在μs量级,相对于其他部分的时间延迟来说都比较小,于是,在延迟分析的时候可以忽略。因此,逆变电源系统的时间延迟主要集中体现在数字PWM控制器和输出级滤波器及吸收回路两个方面。
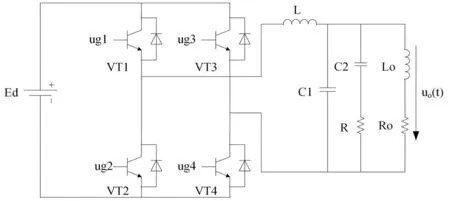
(a)逆变电源主电路
(b)逆变控制框图
图1逆变电源主电路及控制框图
2 对称规则采样数字PWM
逆变电源采用对称规则采样方式,采样周期T等于三角载波周期T。为了实现数字控制,往往采用滞后一拍控制方式[4],将当前采样周期采样计算的调制波控制量推迟到下一个采样周期去更新控制量数据。
如图2,在载波过零时触发采样中断开始ADC采样转换,并更新控制量(),即上一采样周期经采样计算后所得调制波控制量的值;在第个载波周期的起始时刻,事件管理器产生下溢中断启动ADC采样转换,对调制波()进行采样,DSP对采样值进行相关控制算法计算,经过采样计算时间t之后,得到对应的调制波控制量(),在第+1个载波周期过零时刻,更新比较寄存器TxCMPR的值为()。可以看出,相对于数据采样时刻,数据更新点延迟了一个采样周期T,亦即开关周期T。控制量()与三角载波()进行比较,发生比较匹配事件时,产生比较中断,输出PWM脉冲进行翻转,得到对应占空比的PWM驱动脉冲[5]。
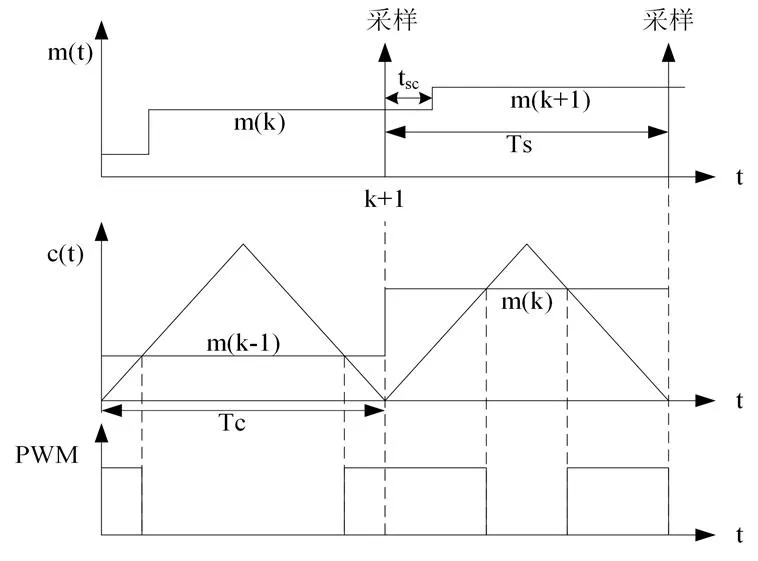
图2对称规则采样PWM
(a)
(b)
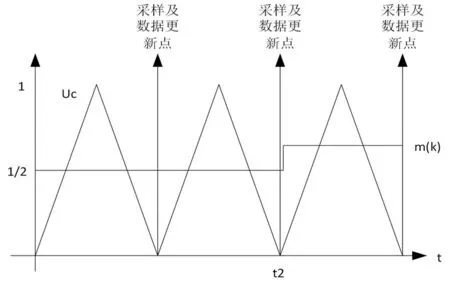
图3对称规则采样2种极限情况
图3(a)中,采样点刚好与调制波控制量的突变点t重合,控制量的突变被及时地采集到,会在下一个采样及数据更新点进行数据更新,从而反映到负载侧,有一个采样周期T的时间延迟;而图3(b)中,采样点却刚好错过了控制量的突变点t,只有在下一个采样时刻才能采集到控制量的突变情况,经2个采样周期T才能将该突变情况反映到负载侧。
于是,对称规则采样数字PWM过程的时间延迟为T~2T.
3 单极性倍频PWM
如图4所示,调制波控制量()与三角载波信号U比较产生两路互补的PWM脉冲u、u分别驱动H桥中的开关器件VT1和VT2,()与相移180度的三角载波信号U比较产生两路互补的PWM脉冲u、u分别驱动VT3和VT4,唯有开关器件VT1和VT4同时开通的时候,H桥才会有输出电压,即图中的u。
由图,从采样及数据更新点t时刻到H桥响应输出电压时刻t之间有时间延迟,根据三角形相似原理有:
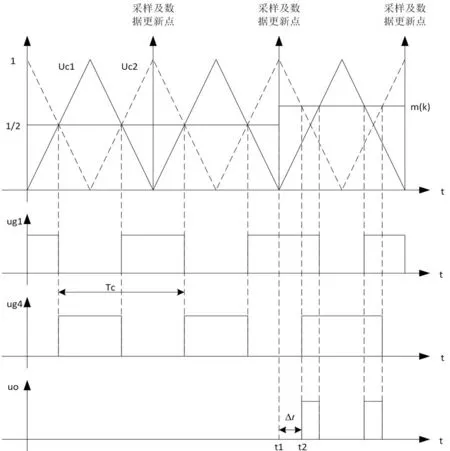
图4单极性倍频PWM
得出时间延迟:

于是
其中,Δ为时间延迟,T为开关频率。
4 滤波器及吸收回路
为了更好地单独分析滤波器及吸收回路对系统延迟的影响,忽略数字控制器及逆变电路的影响,假定IGBT处于完全开通状态,此时可将前级电路等效为一个直流电源,如图5。
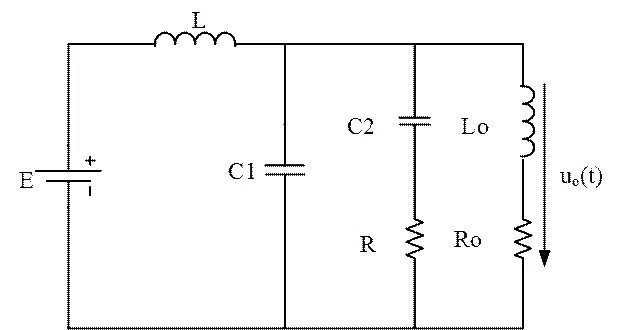
图5滤波器及吸收回路
由图有,传递函数

代入数值可得()。
用matlab画出其阶跃响应曲线如图6所示,由图可得出,滤波器及吸收回路导致的系统延迟为40.6 μs。

图6阶跃响应曲线
5 实验验证
逆变电源系统IGBT开关频率10 kHz,根据前面的理论分析,时间延迟为:
在电压控制模式下,给定100 Hz正负方波信号V=4 V,输出电压波形如图5所示,CH1通道为给定电压信号,CH2通道为电源输出总电压波形。实验测得逆变电源输出电压相对于给定信号的时间延迟为196 μs,这在误差范围内,所以,理论分析与实验实测数据相吻合。
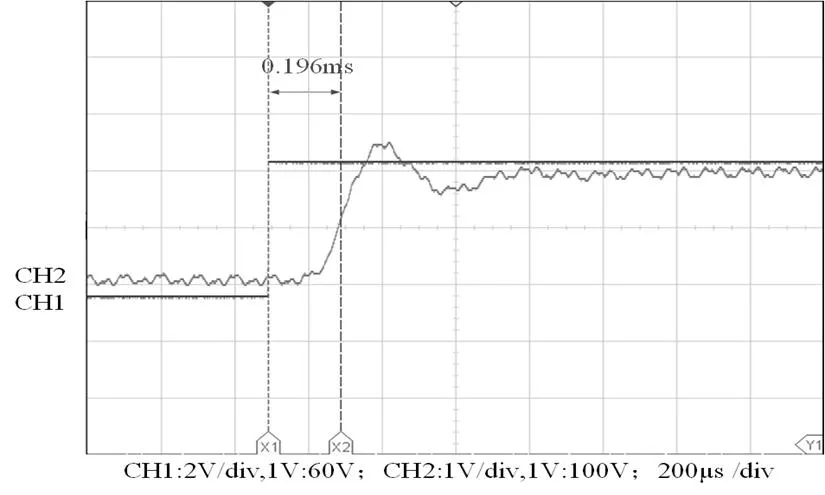
图7输出电压实验波形
为了进一步验证理论分析的正确性,进行了多次试验,并随机选取几个时间点的输出电压响应时间延迟,如表1所示,可以看出逆变电源输出响应时间延迟始终在理论分析范围内随机变动。
表1逆变电源响应时间延迟实验数据

6 结论
文中对影响逆变电源输出响应时间延迟的因素进行了详细分析,忽略一些影响小的环节后,重点分析了以DSP为核心的数字PWM控制方式的具体实现过程,明确了数字PWM对逆变电源响应时间延迟的影响机理,以及数字PWM控制器和滤波器及吸收回路对逆变电源输出电压响应时间延迟的影响情况。最后通过实验所得的实测数据也验证了理论分析方法的正确性和实用性,为下一步的响应时间延迟优化提供了理论基础。
[1] 马伟明. 舰船动力发展的方向——综合电力系统[J]. 上海海事大学学报, 2004, 14(1): 1-11.
[2] 余勇, 张兴, 季建强, 等.大功率电流型多重化变频电源系统控制与分析[J].中国电机工程学报, 2004, 24(12): 24-28.
[3] 单鸿涛, 彭力, 孔雪娟, 等.数字化过程对脉宽调制逆变电源性能的影响机理[J].中国电机工程学报, 2009, 29(6): 29-35.
[4] 孔雪娟.数字控制PWM逆变电源关键技术研究[D].武汉: 华中科技大学, 2005.
[5] 顾卫钢编著.手把手教你学DSP—基于TMS320x281x[M].北京: 北京航空航天大学出版社, 2011.
The Analysis of Digital PWM and Inverter Delay
Ding Changjian, Sun Enlin
(CNOOC Energy Technology & Services Limited, Tianjin 300000, China)
TM464
A
1003-4862(2017)04-0023-03
2016-12-26
丁长健(1980-),男,工学学士。研究方向:船舶工程建造项目管理。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
数学物理学报(2022年3期)2022-05-25
数学物理学报(2019年5期)2019-11-29
电子制作(2019年11期)2019-07-04
电子制作(2018年16期)2018-09-26
中成药(2017年12期)2018-01-19
系统工程与电子技术(2016年7期)2016-08-21
现代工业经济和信息化(2016年8期)2016-05-17
火控雷达技术(2016年2期)2016-02-06
西部广播电视(2015年10期)2016-01-18