
不同的梦想多彩的小车
2017-05-20 12:52刘金鹏
中小学信息技术教育 2017年5期
刘金鹏
每一个孩子从小都有一个梦想:制作一辆完全属于自己的小车。在这个人人皆可创造的时代,做一辆小车也许已经不再是一件难事,但是利用这些小车套件做出的作品大多千遍一律,没有特色和个性。一般小车车体大多采用亚克力、铝合金或木板,可创意和发挥想像力的空间有限,笔者采用硬纸板裁剪后进行小车车底自由拼接,可完成富有特色的车体装拼,采用纸板的另一个好处是在其表面可以任意涂鸦各种造型,完成个性化的装饰,做出个性鲜明的小车。制作流程如下。
1. 裁剪长方形纸板
车体部分是由四块130mm×100mm的长方形纸板及两块100mm×100mm正方形纸板拼接而成。将一张A4大小的2mm厚白卡纸用尺子和铅笔按130mm×100mm大小画出标记,然后用美工刀裁剪出四个相同大小的长方体纸板(为方便书写分别命名为A1-A4)。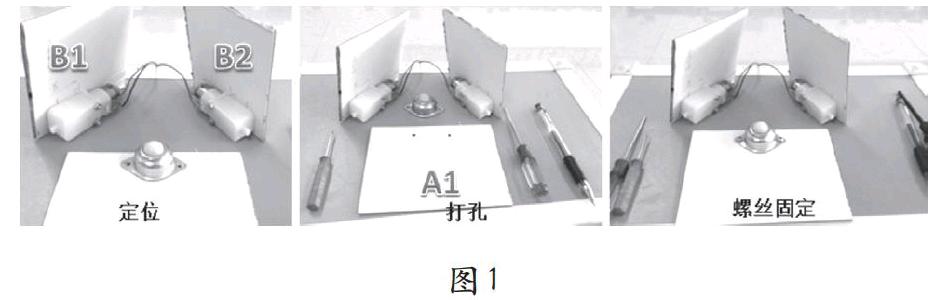
2. 裁剪正方形纸板
用同样的方法在A4白卡纸上裁剪出两个100mm×100mm大小的正方形纸板(为方便书写分别命名为B1、B2)。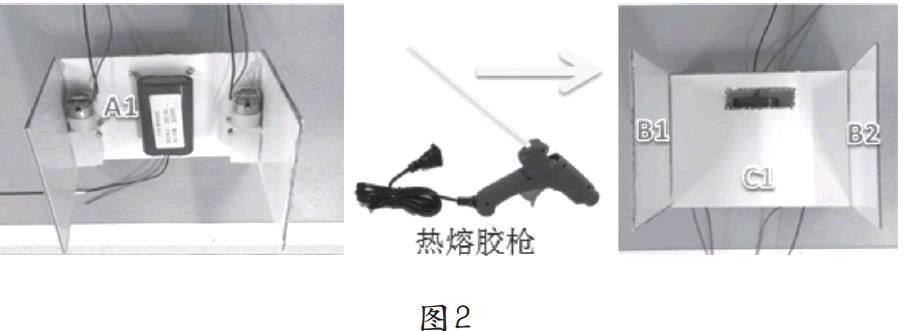
3. 确定电机安装位置并安装
在B1、B2两块正方形纸板上分别固定一个电机。首先要确定电机轴及两个螺丝安装孔的位置,用尺子在纸板上确定好相关尺寸。
在电机轴固定位置用开孔器开孔,也可先用小螺丝刀打洞,然后再用大号螺丝刀把孔扩大;两个电机固定螺丝位置则用小号螺丝刀打孔即可。将电机对准相应位置用螺丝进行固定。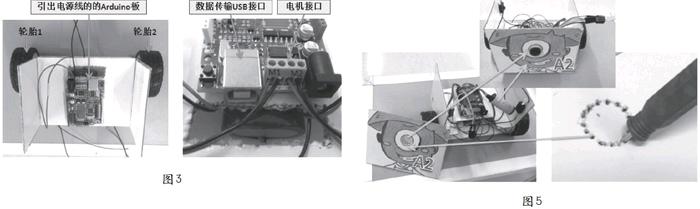
4. 安裝万向轮
在A1(底板)纸板正前方中间位置确定好万向轮(小车前轮)固定孔的位置,用黑色笔做好标记,然后用小号螺丝刀开孔后通过配套的螺丝进行固定(如图1)。
5. 固定电池
将锂电池通过强力双面胶带固定在A1纸板内侧一面中间的位置,尽可能保持小车重心的平衡。这里也可以使用装有干电池的电池盒固定在A1纸板上为小车供电。
6. 拼接纸板
将B1、B2纸板与A1纸板用热熔胶枪粘连在一起,然后用美工刀裁剪一块比A1略小的纸板C1,并在其正前方开一个长方形窗口方便走线,用热熔胶枪固定在电池及电机的上面(如图2)。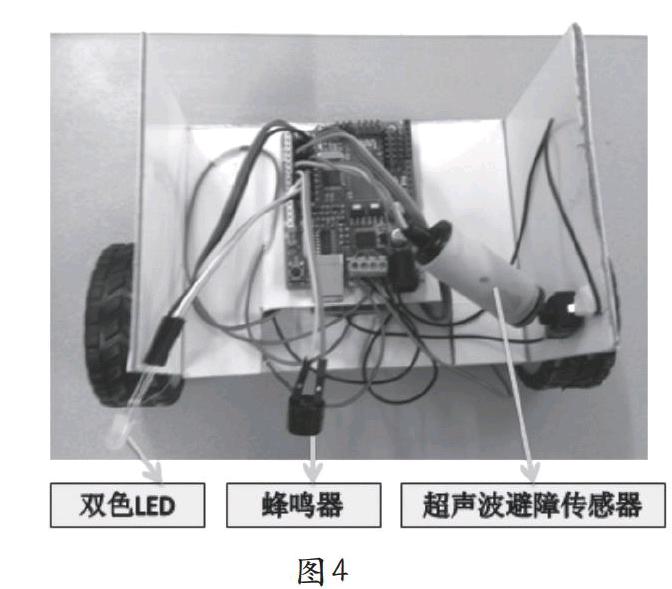
7. 安装轮胎及Arduino主控板
将两个轮胎分别安装在两个电机轴上,把已经引出两条电源线的Arduino主控板(自带电机驱动)用一颗螺丝钉固定在C1纸板上,注意将板子的USB数据口一端对着小车后部,方便连线及后期进行程序调试,左、右两只电机线分别与主控板上M1、M2接线柱相连接,此处连接需要用到小号一字螺丝刀,接头位置露出的铜线不宜过长,可用指甲刀剥线(如图3)。
8. 连接电源与Arduino主控
将电源正极连线与Arduino主控板正极直接相连;将电源负极与自锁开关其中一只引脚相连,并将自锁开关的另一只引脚连接到Arduino主控板的负极,这样就可以通过按自锁开关控制Arduino主控板是否供电。注意导线连接处用纸胶带缠绕,避免接触短路,自锁开关及导线可以通过粘性比较强的纸胶带固定在纸板上,使整个布线尽可能简洁清晰。
9. 电子器件连接
在Arduino主控板相应数字端口用杜邦线分别连接好双色LED、蜂鸣器、超声波避障等传感器(如图4)。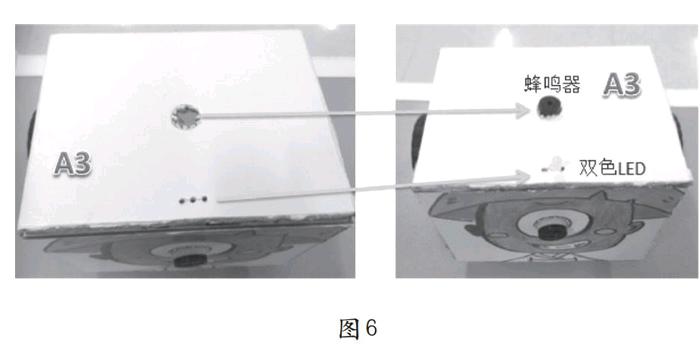
10. 安装超声波传感器
将已经完成涂鸦的盒子机器人正前方纸板(A2)用记号笔标记位置,同时用小号螺丝刀完成打孔。打孔的简便方法是用螺丝刀沿着画好的线条边缘连续扎洞,连点成线,最后用手指用力按压,取下中间的圆形区域即完成打孔。把超声波传感器从打好的孔中穿过,用热熔胶在盒子正前方分别固定好A2纸板及超声波传感器(如图5)。
11. 安装蜂鸣器和双色LED
用同样的方法在盒子正上方纸板(A3)上完成蜂鸣器和双色LED的打孔工作,把元器件安装固定到相应位置后可用少量热熔胶在盒子内侧一边稍加涂沫以防元器件松动(如图6)。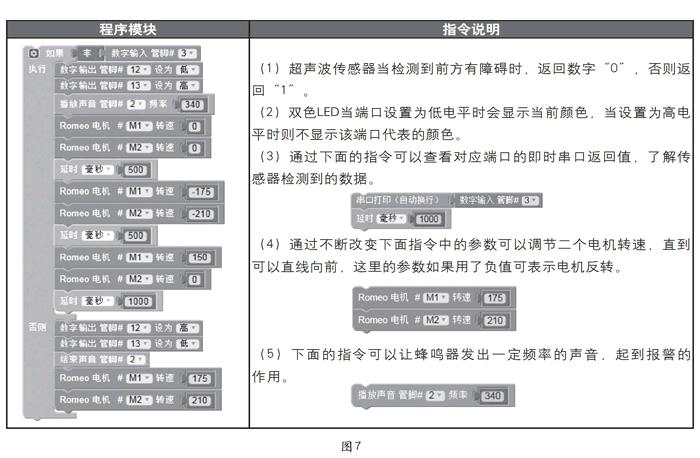
12. 安装后盖
将盒子后侧纸板(A4)打孔后,把自锁开关移至盒子背面中间的位置并用纸胶带固定好,注意这块纸板(A4),不再使用热熔胶固定,而是改用纸胶带来粘连,这样做的好处是方便随时打开盒子后盖来下载调试程序。
13. 增加巡线功能
如果需要纸盒版机器人小车具备巡线功能,则需要在A1纸板万向轮两边安装巡线传感器,原理是当检测到黑线时返回“1”,否则返回“0”,这样当小车放在黑色的线条(可以用黑色的电工胶布来布置小车行走轨迹)上时,两只传感器分别置于黑线两边,通过检测传感器的返回值就可以控制小车调整两边电机速度达到巡线的目的了。
至此,纸盒版机器人小车的结构、电路搭建部分就算是完成了,但它现在还不能按你的想法行走或是避障,因为我们还没有给Arduino主控板写入相应的程序呢!
关于程序编写,我们的设想是通过驱动两只马达分别按一定的速度转动让小车前进,通过超声波传感器侦测前方有无障碍,如果有障碍则通过改变两侧电机速度及方向让小车实现后退转弯,并且同时让LED发出红光,蜂鸣器鸣叫;否则让小车沿直线前进,LED发出绿光。我们使用北师大傅骞团队开发的Mixly软件来编写程序,实现我们的设想。
假设超声波传感器接数字3号端口;双色LED接数字12、13号端口(即双色LED长脚接+5V,二个短脚分别接12、13号端口);蜂鸣器接数字2号端口。纸盒机器人小车避障参考Mixly程序如图7所示。
如果要实现巡线功能,假设二个巡线传感器分别连接数字8号端口和9号端口。纸盒机器人小车巡线参考Mixly程序如图8所示。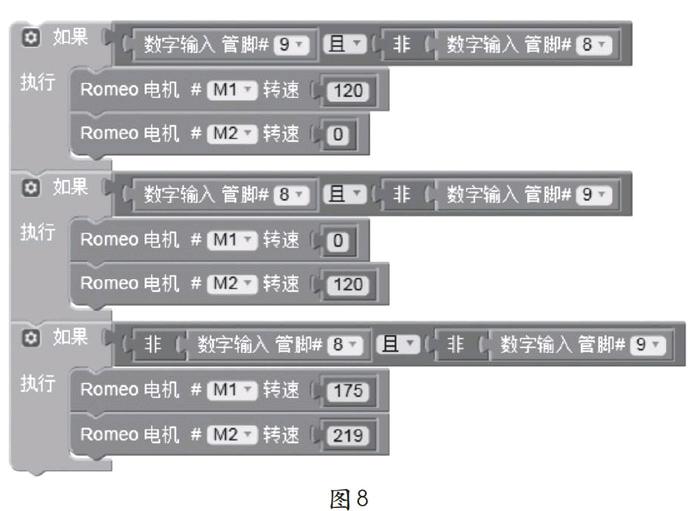
你可以试着编写让小车同时实现巡线和避障功能的程序,期待着你的多彩个性智能小车的问世。
(作者单位:浙江杭州市余杭区安吉路良渚实验学校)
猜你喜欢
控制与信息技术(2022年3期)2022-07-08
学苑创造·A版(2022年5期)2022-05-19
合成材料老化与应用(2021年1期)2021-03-03
网络安全和信息化(2018年2期)2018-11-09
中小企业管理与科技(2018年34期)2018-02-07
军事文摘·科学少年(2017年4期)2017-06-20
化工管理(2017年8期)2017-04-26
电子制作(2016年11期)2016-11-07
发明与创新(2016年6期)2016-08-21
发明与创新(2015年11期)2015-12-29
