
二阶邻居协议下多智能体系统能控能观性保持
2017-05-16 07:07:12王康纪志坚晁永翠
智能系统学报 2017年2期
王康,纪志坚,晁永翠
(青岛大学 自动化与电气工程学院,山东 青岛 266071)
二阶邻居协议下多智能体系统能控能观性保持
王康,纪志坚,晁永翠
(青岛大学 自动化与电气工程学院,山东 青岛 266071)
为了研究多智能体系统的一致性特点及能控、能观性保持策略,分析了具有时变拓扑结构的多智能体系统在一阶邻居协议和二阶邻居协议下的一致性速度,针对拓扑结构的特殊性,利用结构能控性性质和拉普拉斯矩阵第二小特征值与一致性速度之间存在的关系设计出一种使能控性和能观测性保持的控制策略。此外,得出多智能体系统在二阶邻居协议下,具有更快的一致性速度的结论。文中2个主要定理分别通过算例和仿真进行验证,算例和仿真结果与定理结论一致。
多智能体系统;二阶邻居协议;时变拓扑结构;结构能控性;能控性;能观测性;图论
近些年,随着计算机网络系统、无人机、卫星系统的高速发展,关于多智能体系统的研究也成为人们研究的热点。由于多智能体系统间各智能体的协调控制能实现我们所需要的复杂运动,因此有关多智能体系统的研究具有十分重要的意义。在研究多智能体系统时,我们利用代数图论[1]的知识,把多智能体系统用拓扑图表示。其中,拓扑图的节点代表各智能体,拓扑图的边代表各智能体间的连接关系。在研究过程中,产生了两个重大的结果,能控性和一致性。多智能系统的能控性首先是由Tanner[2]提出来的,通过利用经典能控性概念,把拉普拉斯矩阵分块为子矩阵,得到能控性判据。近年来,多智能体系统的能控性研究受到国内外科研工作者的广泛关注[3-8]。然而,在能控性保持方面的研究工作则刚刚起步,目前主要是以L.Sabattini[9-12]的研究为主。
一致性问题的研究可以追溯到20 世纪70 年代的管理科学和统计领域[13-14]。目前关于一致性问题的研究很大程度上以T.Vicsek[15]提出的Vicsek模型为基础。多智能体系统的一致性主要是研究如何基于多智能体系统中个体之间有限的信息交换,实现所有智能体的某个或某些状态量趋于相等的问题。对一致性协议的研究能让我们清楚地了解到智能体之间信息交换的过程。Olfati-Saber[16]提出了解决多智能体网络系统的一致性协议的理论框架,并且得到在连续时间一阶多智能体系统中,当通信拓扑结构表示的图为无向图时,多智能体系统的一致速度取决于图的拉普拉斯矩阵的第二小特征值的结论,即一致性速度与拓扑图的拉普拉斯矩阵第二小特征值λ2之间存在正相关的关系。同时在文献[1,16-18]中,对第二小特征值λ2的物理意义也做出了说明,并指出了λ2不仅可以度量一致性速度,也可以表示智能体系统的稳定性。
在一致性问题中,以一阶邻居协议的研究最为普遍,即考虑智能体的邻居信息。一阶邻居协议具有适用面广泛、作用原理简单的优点。然而由于多智能体系统越来越复杂,一阶邻居协议的信息交换方式已经不能满足我们的需要,例如在复杂的全球卫星网络(GPS)中,采用一阶邻居协议显然会使信息的交换效率低下,整个卫星系统协同控制效果并不好。而采用二阶邻居协议,由于系统收敛性比前者更好,这就为复杂卫星网络系统的运转提供更高效的保障。因此,对二阶邻居协议的研究就显得尤为重要。和一阶邻居协议相比,二阶邻居协议不仅利用智能体邻居的信息,还利用其二阶邻居的信息,而系统实际的通信拓扑结构并未发生变化。本文通过对上述两种一致性协议进行比较,得出了多智能体系统采用二阶邻居协议时,多智能体系统中各智能体达到一致性速度更快的结论。同时,针对现实中具有时变拓扑结构的系统,为了使网络系统能够更稳定运转,避免受外部环境的影响,以达到人们需要的工作状态,这就对系统的能控性和能观测性提出了很大要求,就需要领航者对跟随者的控制能力一直保持下去。本文通过借助结构能控性的概念和性质[19-20],设计了一种全新的控制策略,使多智能体系统的能控性和能观测性得到保持。这对于易受外界环境干扰的多智能体系统的研究具有较高的理论价值。
1 预备知识

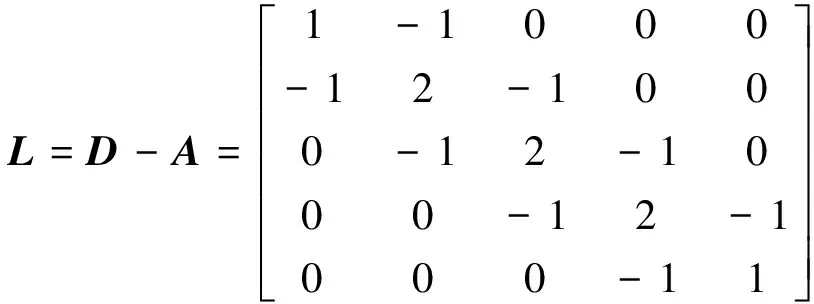
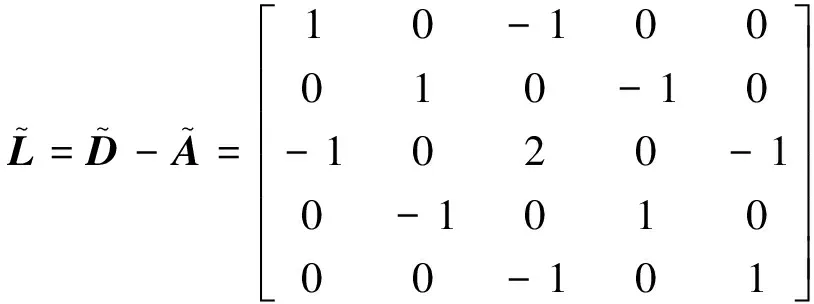
拉普拉斯矩阵是表示拓扑图节点与边关系的一种矩阵,也是我们研究多智能体系统需要借助的一个重要概念。对于一个包含N个节点的无向图G, 其拉普拉斯矩阵定义为L=D-A,拉普拉斯矩阵还可以表示为L=ITI,其中矩阵I=[iij]表示把无向图G规定为具有任意方向有向图的关联矩阵,元素
拉普拉斯矩阵具有如下性质:
1)对于一个所有元素均为1的列向量,L与该列向量的乘积为零矩阵;
2)令λ1,λ2,…,λN为拉普拉斯矩阵的特征值,则0=λ1≤λ2≤…≤λN;
3)第1个非零特征值(第2个最小的特征值λ2) 称为代数连通度。

2 系统模型
(1)


(2)

(3)
式中:wij为实际图中节点之间的权值,wik为虚拟图节点之间权值。
在式(3)中,每个智能体在获取自己的状态信息时不仅利用其邻居的状态信息,还利用其二阶邻居的状态信息。由于智能体i与其二阶邻居之间并不存在实际的通信链路,所以智能体i的二阶邻居的信息由智能体i的邻居间接传递给i。由式(1)和式(3),系统中每个智能体的状态可以表示为
(4)
令wij=wik=1,则
所以系统可以写为如下这种形式:

(5)
引理1[16]拉普拉斯矩阵Lc的第二小特征值λ2可用于表征系统一致收敛的速度。
证明 构造一个李雅普诺夫函数:
对此函数求导可得
结合式(5)得
因为图G是无向连通图,所以[16]:


证毕。
定理1 对于一阶多智能体系统(1),它在二阶邻居协议(3)下达到一致性的速度比在一阶邻居协议(2)下更快。

(6)

因此
(7)
显然,式(7)大于式(6),即多智能体系统在二阶邻居协议下达到一致性的速度比在一阶邻居协议下更快。证毕。

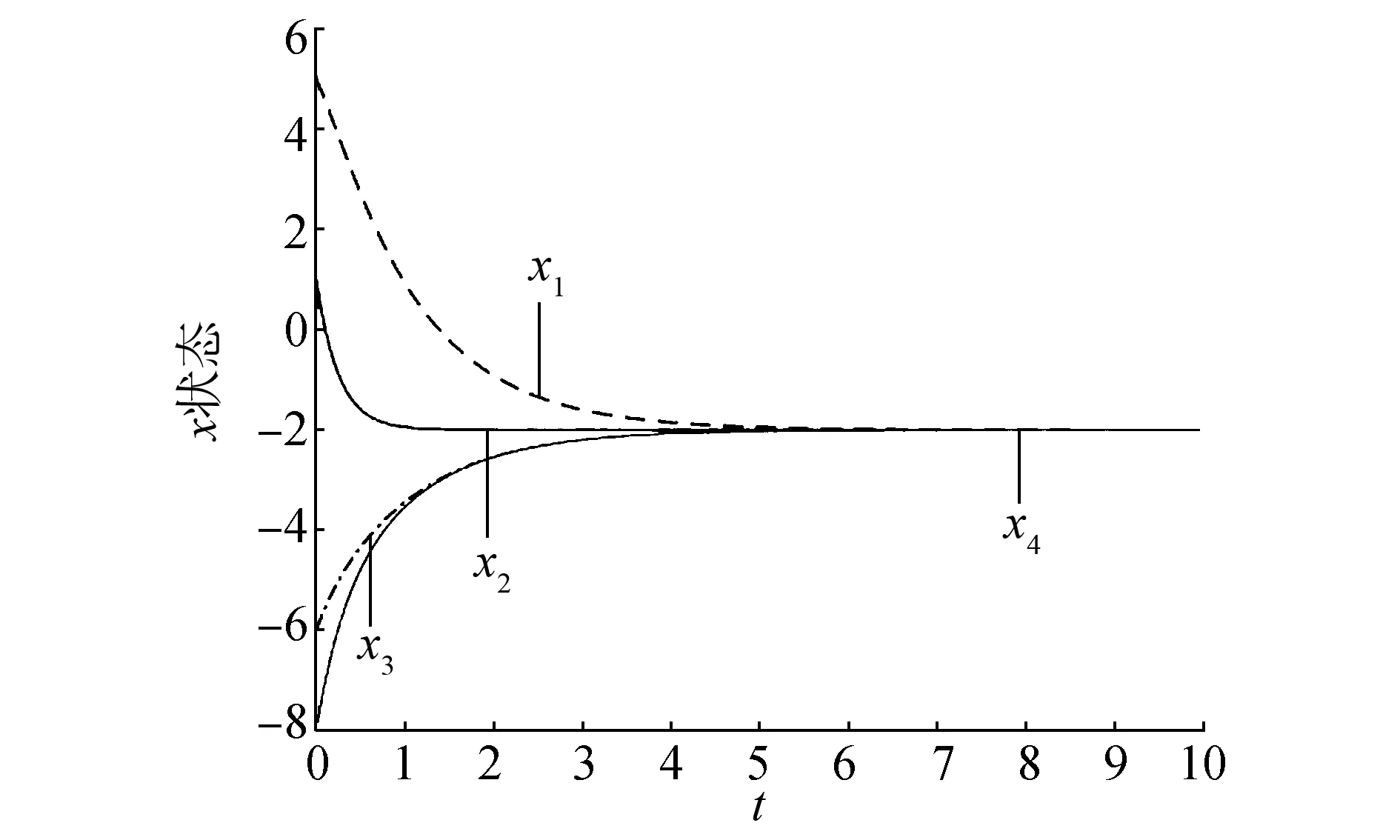
图1 一阶邻居协议下各智能体的状态轨迹Fig.1 The state trajectory of each agent under the first-order neighbors protocol
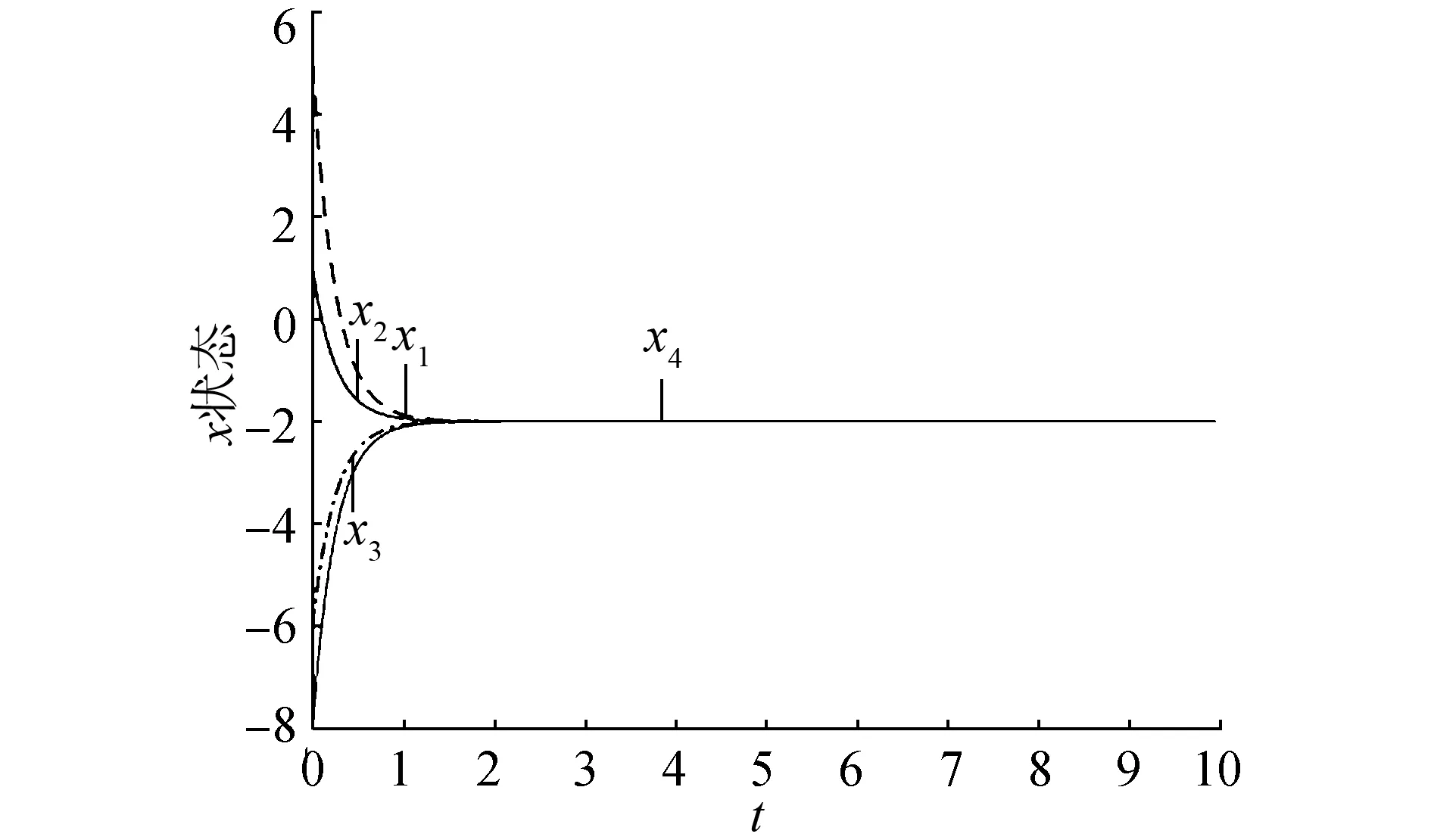
图2 二阶邻居协议下各智能体的状态轨迹Fig.2 The state trajectory of each agent under the second-order neighbors protocol
通过对图1和图2进行比较分析,我们发现多智能体系统(1)在二阶邻居协议(3)下的收敛性更好,即在二阶邻居协议(3)下各智能体达到一致性的速度要比在一阶邻居协议(2)下更快。因此,在设计多智能体系统时,尽可能地选用基于二阶邻居的一致性协议,会使系统更快速地达到一致性。

(8)
(9)
式中:矩阵F∈RNF×NF代表跟随者之间的传递关系,矩阵B∈RNL×NL代表领航者之间的传递关系,矩阵r∈RNF×NL代表领航者和跟随者之间的传递关系。
当在系统中选取任意多个节点为领航者时,假设系统中有NL个领航者,我们规定矩阵r取自矩阵Lc中这NL个节点所在的列向量减去这NL个节点所在行向量和列向量的共同元素后剩余元素所组成的NF×NL矩阵。矩阵-F为合并图拉普拉斯矩阵Lc减去这NL个节点所在行和所在列后剩下的NF×NF矩阵。
3 实例分析
对于一个具有5个节点的拓扑图,我们取第2个和第4个节点作为领航者,如图3。

图3 具有5个节点的拓扑图Fig.3 Topology with 5 nodes
所以
假设领航者能够获得输出向量y,且y∈RNL×1,那么,网络系统的动态方程可以写为文献[9]所描述的那样:
(10)
定理2 若合并图的拉普拉斯矩阵Lc的子矩阵F所对应的正交特征向量组成的矩阵U不与向量r正交,则此拓扑图所对应的多智能体系统既是能控的,又是能观测的。
证明 根据式(10),可得能控性判别矩阵:
(11)
可写为
因为U是非奇异矩阵,若使能控性判别矩阵C满秩,只需要保证矩阵
(12)
同理,若使能观性判别矩阵O满秩,则也需使UTr≠0。也就是说,若多智能体系统是能控的,那么它也是能观测的。证毕。
综上所述,在二阶邻居协议下,多智能体系统既能控又能观测的条件为:矩阵F所对应的特征向量U不与向量r正交。
4 对结构能控性维持策略的研究
在基于二阶邻居协议(3)下具有时变拓扑结构的多智能体系统(1)随时间变化过程中,各节点之间边的条数和距离可能发生变化,进而影响系统合并图的拉普拉斯矩阵Lc,并根据定理2和文献[1],在某一时刻,可能也会导致代数连通度λ2发生改变以及使得系统不能控。因此,为了避免具有时变拓扑结构的多智能体系统(1)的能控性发生改变,我们引入了结构能控性的概念。
4.1 结构能控性
定义1 对于一个无权重的多智能体系统,如果能够找到至少一组权重,使得相应的系统变为能控,那么称这个多智能体系统是结构能控的。
在文章[18]中,可以知道多智能体系统是结构能控的,当且仅当系统的拓扑图是连通的,即代数连通度λ2>0。可以借助结构能控性的概念,通过给拓扑图的边赋予相应的权值,使本来不能控的系统变为能控,以达到对多智能体系统的状态要求。
4.2 实例分析
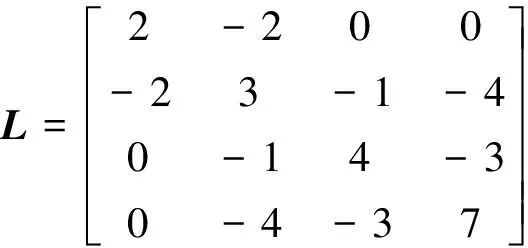
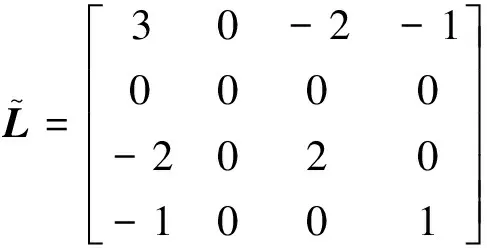
所以基于二阶邻居协议下多智能体系统的拉普拉斯矩阵为

图4 权图Fig.4 Weight graph
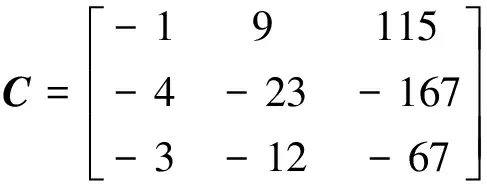
由式(11)得,能控性判别矩阵为
根据结构能控性的定义和文献[18],可得到图5所示的多智能体系统能控性和结构能控性的关系:

图5 多智能体系统能控性和结构能控性的关系Fig.5 Relationship between controllability and structural controllability of multi-agent system
3.3 结构能控性的保持方法
在本文中,具有时变拓扑结构的多智能体系统(1),随着时间的变化,可能会导致已连通的节点之间的距离增加,从而使连通强度改变,导致系统的能控性发生变化。我们的目的只考虑如何使已连通节点间的连通强度不随时间消失,而关于不连通的节点是否会随时间而靠近从而连通的情况则不进行相关分析。如图6所示,其中(a)为网络系统的初始位置,设点1为领航者,并给它注入某一控制输入,则各智能体在到达一致状态的过程中,显然由(b)可看出,由于第2点和第3点的距离变大,致使两点的连接强度减弱,这显然不符合多智能体系统的设计要求。
图6 时变拓扑结构Fig.6 Time varying topology
因此,为了避免上述情况的出现,在本章节提出了一个控制策略,如式(13)所示:
(13)

时,两个智能体间有通信联系,节点xi、xj之间存在边eij,此时wij>0。 那么
(14)
式中:κ满足e-R2/κ2=ω,ω是一个比0大的常数。当wij=0时,说明智能体xi、xj之间没有通信联系,即不存在边eij。同理,虚拟图gv的权值:
(15)



2)能量函数是非负的。
因此,可以写出能量函数的表达式为
(16)
所以网络系统的动态方程可以修改为式(7)形式:
(17)

(18)
(19)
能量函数对时间的导数可以写为以下形式:
由式(13)和式(18)可得,能量函数的导数也可写为
根据式(19),并由
可得下列不等式:
因此,如果不等式
(20)

(21)
那么,式(20)所描述的不等式就可以写为
(22)
(23)
因此由上述结论可知:如果在初始时刻拓扑图连通,那么随着时间的变化,即使拓扑图的结构发生变化,其所对应的拉普拉斯矩阵的第2个特征值λ2也会永远大于零。那么多智能体系统的结构能控性得到了保持。证毕。
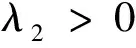
根据能量函数的图像可以进一步理解上述结论。能量函数的图像如图7所示。
图7 能量函数Ε的图像Fig.7 Image of energy function E
由能量函数的图像可知,如果在初始时刻给具有结构能控性的系统赋予一组权重不为1的权值,那么不仅说明λ2恒大于零,系统结构能控性得到保持,还说明拓扑图恒连通,任意节点都会与其他至少一个节点相连接。即‖xi-xj‖≤R,存在权值wij。又因为权值wij=1时,由式(14)和式(15)得,‖xi-xj‖=0,显然无意义。因此权值wij≠1,所以结构能控性得到保持的系统必定存在一组边的权值,且权值不为1。因此多智能体系统(1)具有能控性和能观测性。

4 结束语
由于二阶邻居协议式(3)在到达一致性的速度上比一阶邻居协议式(2)更有优势,所以本文对二阶邻居协议式(3)下的多智能体方面进行了研究,并对相关定理通过算例进行验证。而对于智能体与二阶邻居通信过程中可能会出现时滞的情况,这将是未来的一个重点研究的问题。本文对具有时变拓扑结构的多智能体系统的一致性协议的选取和能控性保持方面的研究提供了一个方向和基础。
[1]GODSILC,ROYLEG.Algebraicgraphtheory[M].NewYork:Springer, 2001.
[2]TANNERHG.Onthecontrollabilityofnearestneighborinterconnections[C]//Proceedingsofthe43rdIEEEConferenceondecisionandControl.Nassau, 2004, 3: 2467-2472.
[3]JIZhijian,LINHai,YUHaisheng.Protocolsdesignanduncontrollabletopologiesconstructionformulti-agentnetworks[J].IEEEtransactionsonautomaticcontrol, 2015, 60(3): 781-786.
[4]JIZhijian,LINHai,YUHaisheng.Leadersinmulti-agentcontrollabilityunderconsensusalgorithmandtreetopology[J].Systems&controlletters, 2012, 61(9): 918-925.
[5]JIZhijian,WANGZidong,LINHai,etal.Interconnectiontopologiesformulti-agentcoordinationunderleader-followerframework[J].Automatica, 2009, 45(12): 2857-2863.
[6]晁永翠, 纪志坚, 王耀威, 等. 复杂网络在路形拓扑结构下可控的充要条件[J]. 智能系统学报, 2015, 10(4): 577-582.CHAOYongcui,JIZhijian,WANGYaowei,etal.Necessaryandsufficientconditionsforthecontrollabilityofcomplexnetworkswithpathtopology[J].CAAItransactionsonintelligentsystems, 2015, 10(4): 577-582.
[7]董洁, 纪志坚, 王晓晓. 多智能体网络系统的能控性代数条件[J]. 智能系统学报, 2015, 10(5): 747-754.DONGJie,JIZhijian,WANGXiaoxiao.Algebraicconditionsforthecontrollabilityofmulti-agentsystems[J].CAAItransactionsonintelligentsystems, 2015, 10(5): 747-754.
[8]王晓晓, 纪志坚. 广播信号下非一致多智能体系统的能控性[J]. 智能系统学报, 2014, 9(4): 401-406.WANGXiaoxiao,JIZhijian.Controllabilityofnon-identicalmulti-agentsystemsunderabroadcastingcontrolsignal[J].CAAItransactionsonintelligentsystems, 2014, 9(4): 401-406.
[9]SABATTINIL,SECCHIC,FANTUZZIC.Controllabilityandobservabilitypreservationfornetworkedsystemswithtimevaryingtopologies[C]//Proceedingsofthe19thWorldCongressontheInternationalFederationofAutomaticControl.CapeTown,SouthAfrica, 2004: 1837-1842.
[10]SABATTINIL,CHOPRAN,SECCHIC.Ondecentralizedconnectivitymaintenanceformobileroboticsystems[C]//Proceedingsofthe2011 50thIEEEConferenceonDecisionandControlandEuropeanControlConference.Orlando,USA, 2011: 988-993.
[11]SABATTINIL,CHOPRAN,SECCHIC.Distributedcontrolofmulti-robotsystemswithglobalconnectivitymaintenance[C]//Proceedingsof2011IEEE/RSJInternationalConferenceonIntelligentRobotsandSystems.SanFrancisco,CA, 2011: 2321-2326.
[12]SABATTINIL,SECCHIC,COCETTIM,etal.Implementationofcoordinatedcomplexdynamicbehaviorsinmultirobotsystems[J].IEEEtransactionsonrobotics, 2015, 31(4): 1018-1032.
[13]DEGROOTMH.ReachingaConsensus[J].JournaloftheAmericanstatisticalassociation, 1974, 69(345): 118-121.
[14]CHATTERJEES,SENETAE.Towardsconsensus:someconvergencetheoremsonrepeatedaveraging[J].Journalofappliedprobability, 1977, 14(1): 89-97.
[15]VICSEKT,CZIRóKA,BEN-JACOBE,etal.Noveltypeofphasetransitioninasystemofself-drivenparticles[J].Physicalreviewletters, 1995, 75(6): 1226-1229.
[16]OLFATI-SABERR,MURRAYRM.Consensusproblemsinnetworksofagentswithswitchingtopologyandtime-delays[J].IEEEtransactionsonautomaticcontrol, 2004, 49(9): 1520-1533.
[17]RENWei,BEARDRW,MCLAINTW.Coordinationvariablesandconsensusbuildinginmultiplevehiclesystems[M]//KUMARV,LEONARDN,MORSEAS.CooperativeControl.BerlinHeidelberg:Springer, 2005: 171-188.
[18]FIEDLERM.Algebraicconnectivityofgraphs[J].Czechoslovakmathematicaljournal, 1973, 23(2): 298-305.
[19]ZAMANIM,LINHai.Structuralcontrollabilityofmulti-agentsystems[C]//Proceedingsof2009AmericanControlConference.St.Louis,USA, 2009: 5743-5748.
[20]LINCT.Structuralcontrollability[J].IEEEtransactionsonautomaticcontrol, 1974, 19(3): 201-208.
[21]EGERSTEDTM,MARTINIS,CAOMing,etal.Interactingwithnetworks:howdoesstructurerelatetocontrollabilityinsingle-leader,consensusnetworks[J].IEEEcontrolsystems, 2012, 32(4): 66-73.

王康,男,1992年生,硕士研究生,主要研究方向为多智能体系统的能控性。

纪志坚,男,1973年生,教授,博士生导师,博士,主要研究方向为群体系统动力学与协调控制、复杂网络、切换动力系统的分析与控制、系统生物以及基于网络的控制系统。先后主持国家自然科学基金项目3项、山东省杰出青年科学基金项目1项,山东省杰出青年基金获得者。先后参与多项国家自然科学基金及“973”和“863”项目的研究。发表学术论文70余篇,其中被SCI检索23篇,EI检索50余篇。
A control strategy for maitaining controllability and observability ofa multi-agent system with the second-order neighborhood protocol
WANG Kang, JI Zhijian, CHAO Yongcui
(School of Automation Engineering, Qingdao University, Qingdao 266071, China)
In order to study the characteristics of the consensus, controllability and observability of multi-agent systems, we analyze the consensus speed of a multi-agent system with time-varying topologies under first-order and second-order neighborhood protocols. By utilizing the properties of the structural controllability and the relationship between the second-smallest eigenvalue of the Laplacian matrix and the consensus speed, we designed a control strategy to maintain both controllability and observability. In addition, we concluded that the multi-agent system had a faster consensus speed under the second-order neighborhood protocol. Using examples and simulations, we verified the two main theorems proposed in this paper, with our observed results in full agreement with the conclusions of our theoretical analysis.
multi-agent system; second-order neighborhood protocol; time varying topologies; structural controllability; controllability; observability; graph theory
2016-01-13.
日期:2017-01-11.
国家自然科学基金项目(61374062);山东省杰出青年科学基金项目(JQ201419).
纪志坚.E-mail:jizhijian@pku.org.cn.
10.11992/tis.201601022
http://www.cnki.net/kcms/detail/23.1538.tp.20170111.1705.012.html
TP13
A
1673-4785(2017)02-0213-08
王康,纪志坚,晁永翠. 二阶邻居协议下多智能体系统能控能观性保持[J]. 智能系统学报, 2017, 12(2): 213-220.
英文引用格式:WANG Kang,JI Zhijian,CHAO Yongcui. A control strategy for maitaining controllability and observability of a multi-agent system with the second-order neighborhood protocol[J]. CAAI transactions on intelligent systems, 2017, 12(2): 213-220.
猜你喜欢
电子设计工程(2023年2期)2023-01-24 12:52:12
数学年刊A辑(中文版)(2022年1期)2022-08-20 08:50:22
应用数学(2020年2期)2020-06-24 06:02:46
华东师范大学学报(自然科学版)(2020年1期)2020-03-16 03:14:55
数学物理学报(2018年6期)2019-01-28 08:58:02
中央民族大学学报(自然科学版)(2018年3期)2018-11-09 01:16:34
Acta Mathematica Scientia(English Series)(2018年6期)2018-03-01 03:13:44
现代计算机(2016年11期)2016-02-28 18:35:21
中央民族大学学报(自然科学版)(2014年2期)2014-06-09 08:28:14
郑州大学学报(理学版)(2014年3期)2014-03-01 04:21:01
