
电控水稻精量穴直播机播种系统方案设计
2017-05-15 05:50:35朱景建
湖州职业技术学院学报 2017年1期
朱 景 建
(湖州职业技术学院 机电与汽车工程分院, 浙江 湖州 313000)
电控水稻精量穴直播机播种系统方案设计
朱 景 建
(湖州职业技术学院 机电与汽车工程分院, 浙江 湖州 313000)
水稻精量穴直播种植方式是当代最先进的种植方式,在用和在研的水稻穴播机存在着漏播和重播、伤种及穴粒分散等技术瓶颈。采用现代传感技术和智能控制技术,通过组穴过程监测和多环节控制策略,设计了一种电控水稻精量穴直播机播种系统的技术控制和结构方案,可突破现有水稻精量穴播机现存的技术瓶颈,满足农艺技术要求的穴播质量。
水稻; 播种系统; 精量穴播; 不合格穴; 穴粒监测
水稻精量穴直播种植技术是由水稻条直播和撒播种植方式发展而来的,是水稻直播技术的理想形式,该技术在一些农业技术先进的水稻主产国已推广应用多年。国内开始重视这方面的研究也有十多年,目前还处在推广实验阶段,每年水稻精量穴直播种植面积不到总种植面积的1%。水稻精量穴播种植有以下优点:①节水、省种、节约劳动力;②可全程机械化作业,规模化种植,生产效率高;③播种较深,植株分蘖能力强,产量高于移栽水稻;④水稻旱直播种植时间迟,可避开虫害,降低农药用量,提高稻米品质[1]149-152。
水稻精量穴直播种植方式对播种质量要求高,播种机性能和操作水平直接影响播种效果,最终影响水稻产量和质量。国内推广水稻精量穴直播种植存在以下难题:①进口水稻精量穴直播机价格远超农户购置实力,且播种质量也不完全满足农艺要求;②自主品牌精量穴播机的购置成本也超过农户预期,且有以下关键技术尚待突破:①漏播和重播----每穴种子粒数小于理论粒数下限为漏播,大于理论粒数上限为重播;②伤种----主要是指播种器取种(机械式)或组穴(气力式)过程中,对破胸露白的种子强制外力作用所造成的伤害;③穴粒分散----同穴种粒不同时下落,造成的条播现象。
以上技术难题所有在用水稻精量穴播机都不同程度存在,也是长期困扰国内自主品牌精量穴播机发展的技术关键。因此,本文拟打破常规设计理念,将现代检测技术和智能控制技术融入设计方案中,做出全新概念的电控水稻精量穴直播机。
一、现有水稻精量穴直播机播种器技术分析
在用和在研的水稻穴播机的核心技术都集中在播种器上,按其播种原理分为机械式播种器和气力式播种器两大类[2]23-25。
如图1所示,是机械式播种器的基本结构形式,基本原理是在一个由地轮带动的播种盘边缘上均匀布置几个穴槽,播种盘转动过程中,其边缘穿过储种箱,穴槽可带走一定数量的种粒,转到接近最低点的穴槽中的种粒在重力和离心力的共同作用下抛向地面。或者在播种盘圆周均布勺型铲,转动过程中铲勺穿过储种箱带走一定数量的种粒。由此过程不难看出其存在三方面技术缺陷:
①对于外形和尺寸相差较大的芽种,穴槽或铲勺取种数量难以控制,会造成漏播或重播缺陷;
②旋转的播种盘边沿穿过储种箱对部分芽种造成机械切割损伤和摩擦损伤;
③由于穴槽或铲勺的一面是敞开的,穴槽或铲勺中种粒是叠放的,播种盘是转动的,播种机是向前运动的,这几种因素综合影响,导致同穴种粒不同时下落,会造成条播现象,不能保证农艺要求的穴播效果。另一种传送带式机械播种器,尽管取种方式能够改善伤种问题,但漏播和重播问题仍没有改善,且条播现象依然严重。
据权威资料报道,在用机械式水稻穴直播机,田间试验测得穴合格率平均值没有突破85%,穴粒分散成条播现象严重,伤种率数据检测难度较大而鲜见报道[3]12-16。
目前结构上最先进的气力式水稻穴播播种器是气吸—气压式。图2是这种播种器播种盘的内部结构,分为三部分:吸入弧段(低压室)、携种弧段(低压室)和投种弧段(高压室)。播种盘内吸孔附近设置有梳种条,它对吸入弧段的种子有搅动作用,可使吸种弧段种子均匀分布,保证每个吸孔不漏吸,降低漏播率。采用每组吸孔个数决定下播穴粒数最大值,重播率趋于零。在播种盘的投种弧段通入高压气体,可提高种子下落同时性,改善穴粒分散的条播现象。水稻芽种在播种盘低压室被吸孔吸附后的状态有平躺、竖立和侧立三种情况。当种子处于直立状态和侧立状态时,如果是有芽一端进入吸孔,在排种盘旋转过程中,会由于低压室其它悬浮飞转的种粒碰撞而伤种,在高压室脱落过程中也可能伤种。目前关于这种播种机构伤种率的数据还没有报导。
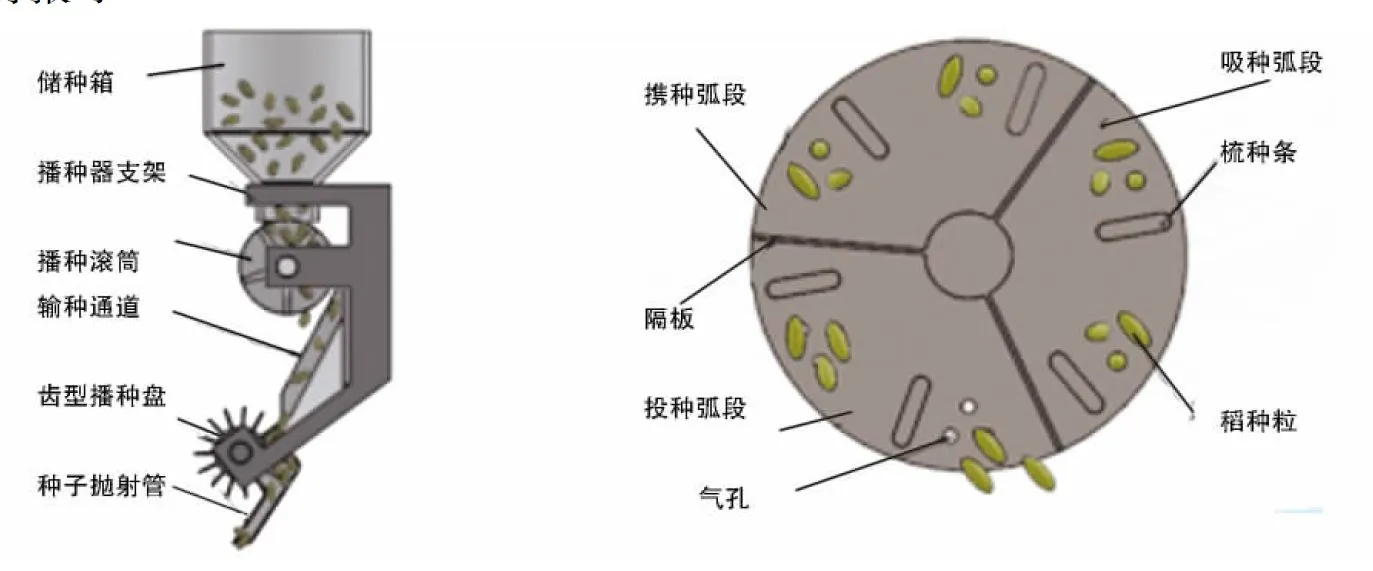
图1 机械式水稻穴直播机播种器图 2 气吸—气压式播种器
从报道的试验数据可知,这种气吸—气压组合式播种器的穴粒分散和重播率问题解决较好,但漏播问题没有得到解决,实验室测试:穴合格率平均值小于86.5%,田间试验穴合格率平均值小于76.3%。两种试验条件下存在较大数据差值的原因,主要是低压室真空度在田间振动环境不稳定,且振动机械作用也使吸附的部分种粒脱落。如果采用提高低压室真空度来解决这一问题,不仅消耗功率过大,也会进一步造成伤种[4]83-125。
通过以上数据分析可知,气力式水稻穴直播机实际应用的综合性能指标还达不到机械式穴直播机的水平,尚待进一步研究。
二、电控水稻精量穴直播机播种系统控制方案设计
鉴于目前在用和在研的水稻穴直播机存在的技术问题,本文认为,传统的设计理念已经难以逾越这些技术障碍,这是由于水稻芽种特殊的机械物理特性所决定的。因此,本设计运用现代检测手段和智能控制技术,力图使最终播种效果符合农艺要求的技术指标,即穴合格率平均值大于95%,伤种率平均值小于2‰,穴粒集中度平均值不大于R=15 mm。
该设计方案技术特点与当前机械式或气力式播种器比较,从根本上把随机强制取种组穴、自由下播的模糊、简单控制,分解成如下清晰的多环节控制:整定种粒规则流动----轮刷轻播组穴----穴粒监测----筛选合格穴----储备合格穴----穴粒同时下播。把播种全过程作为一个控制系统,并将整个系统分为三个控制环节。
(一)种粒流整定与组穴控制
为避免传统组穴方式对种子的伤害,本方案设计了种子流动规整与组穴系统控制技术路线,如图3所示。通过对满足农艺技术要求的水稻芽种的机械物理特性监测,分析种子流动态的可规整性,运用仿真技术对种子进行动力学分析,设计出具有振动机构和整定轨道的整定系统,特定的轨道几何形状设计,保证种子连续规则的流动,其流速与组穴刷轮的步进速度相适应,最大限度地提高组穴速度和穴合格率,满足最大播种速度要求。
(二)组穴情况监测与选、储穴控制
通过种子流动规整和组穴控制环节,争取获得穴合格率平均值在85%以上。为使最终下播穴合格率接近100%,需要对不合格穴筛选剔除,并对合格穴进行储备。为此制定了穴情检测与选、储穴控制技术路线,如图4所示。

图3 稻种流动规整及组穴控制系统技术路线图 图4 穴情监测与选储穴控制系统技术路线图
(三)储穴与播种速度匹配控制
储备合格穴可消除由于剔除不合格穴所造成的连续播种中断,避免空穴现象,或者,保证下播的穴种都是取自准备充分的、合格的储种盘的种源,这样在播种过程中既不会出现不合格的穴种,也不会出现间断的空穴现象。除此之外,播种过程还必须实时控制储种速度与播种速度相匹配。本设计采用播种盘与储种盘单独驱动、功能交替互换、联合控制策略。
三、电控水稻精量穴直播机播种系统结构方案设计
执行上述三个控制技术路线需要合理的结构技术方案作支撑,本文对应三个技术路线做了如下结构方案设计。
(一)种粒流整定与组穴控制系统结构设计
如图5所示机构是试验验证水稻芽种自由流动态可规整性能,并进行组穴控制的硬件系统。通过刷轮和轨道截面几何形状及轨道倾角的结构设计,优化种粒连续流动规则的整定系统几何参数,并运用软件系统对振动电机参数和组穴刷轮步进电机参数进行程序控制,使该控制环节能够达到输出组穴合格率不小于85%的技术指标。
(二)组穴监测与选、储穴控制系统结构设计
如图6所示机构是试验验证组穴情况监测并实现选、储穴控制的硬件系统。在种粒下落的通道上设置光栅传感器,传感器将检测到的稻粒通过信号输送到微机进行放大处理,微机系统根据稻粒数量信号向选穴电机和储穴电机发出工作指令,决定一组穴粒通过光栅传感器后的去向。该环节控制参数设定包括:传感器参数设定、步进电机参数设定、落种通道长度设定和分配管长度设定。应保证该控制环节达到输出合格穴漏检率小于3%、穴储存率不小于98%的技术指标要求。
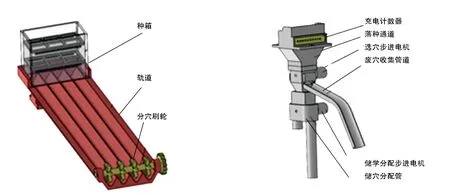
图5 可横向振动芽种流动规整及组穴机构 图6 穴情监测及选、储穴控制机构
(三)储穴与播种速度匹配控制系统结构设计
播种过程是连续作业的,但受诸多因素影响,不能保证组成连续的合格穴并充入储穴盘,因此在下播之前,必须储备有充足数量的合格穴,才能避免发生空穴现象。本机构虽然设计有储穴盘,但还必须保证储种速度与播种速度相匹配。微机系统通过判断储种盘情况,及时调整播种速度参数。通过排种阀门电磁阀脉冲参数设定,可保证穴粒集中度。该控制环节的输出指标应达到:储、排种盘工作状态转换无间隙,保证储穴盘100%充满,播种盘100%顺利播下。
四、方案试验条件分析
此方案是基于初步计算和试验而设计,结合现有在用水稻穴播机的基本技术参数,试验条件和预期结果可做如下考虑:
(1)水稻芽种要在适应自身机械物理特性和几何形状的轨道内做规则、有序运动,并保证其排列速度和流动速度符合预设要求,需要确定整定系统的安装倾角参数和振动参数。当取下列一组参数试验时(轨道长度250~300 mm,轨道倾角在28~31 °之间,振动频率400~500 Hz,振幅7~9 mm,两刷头弦长4~5 mm,刷轮转速100 rpm),应得到单个组穴刷头平均播空率不大于15%的结果。如果得不到预期结果,可在各参数变化范围内重新组合调整,并进一步优化轨道截面结构参数。
(2)组合式光栅传感器应安装在低于轨道下端口45 mm处,按照每个组穴刷轮的振动范围,分隔成与光栅输出端数量相等的种粒下落单通道。在距离光栅传感器下端面80 mm处,设置微机控制的三位三通旋转电磁阀,即选、储穴阀,它根据检测到的穴情和播种盘工作情况转到对应状态。光栅传感器的漏检率不大于2%;选、储穴阀响应速度应不大于10 °/ms,才能实现选、储穴功能。可通过增加光栅传感器到电磁阀之间距离,降低对电磁阀响应速度要求。
(3)播种速度受储穴速度限制。储穴盘步进速度由组穴情况决定,要确保储种盘和播种盘无间隙转换,实现无空穴连续播种的农艺要求,播种盘步进速度应是储穴盘步进速度的70~80%之间,单位时间内合格穴的储存数量决定了播种生产率的大小。
[1] 赵永亮,梁宝忠,唐华晴,等.水稻不同种植方式的比较试验[J].农机化研究,2014(8).
[2] 李洪昌,高 芳,赵 湛.国内外精密排种器研究现状与发展趋势[J].中国农机化学报,2014(2).
[3] 包春江,王瑞丽.日本水稻机械直播技术综述[J].农业科技与装备,2007(6).
[4] 翟建波.气力式水稻芽种精量穴直播排种器设计与试验研究[D].华中农业大学博士学位论文,2015.
Conceptual Design on the Electronic Precision Controlled Rice Hole Planting Seeder
ZHU Jing-jian
(School of Mechanical Electrical ﹠ Automotive Engineering, Huzhou Vocational and Technological College, Huzhou 313000, China)
Rice hole planting precision controlling planting method on rice hole planting is the most advanced planting method, There are three insurmountable technical bottlenecks on being used and being studied rice hole planting seeder: unqualified seeds per bunch, seed damage and seeds are too scattered. This paper introduces the control technology route and structure design scheme on the electronic precision controlled rice hole planting seeder. The scheme adopts modern sensor technology and intelligent control technology through the process of monitoring and multi link control strategy, which is able to break through the technical bottleneck of existing rice hole planting seeder, to meet the technical requirements of the Agronomic sowing quality.
rice; planning system; precision hole planting; unqualified seeds per bunch; monitoring of seeds per bunch
2017-02-02
本文系2016年度湖州市科技计划公益性应用研究项目“水稻精量穴直播机关键技术研究”(2016GY05)的成果之一。
朱景建(1962-),男,河南南阳人,副教授,主要从事机电一体化技术研究。
TH122
A
1672-2388(2017)01-0069-04
猜你喜欢
青少年科技博览(中学版)(2022年6期)2022-12-27 19:44:27
今日农业(2021年21期)2021-11-26 05:07:00
军事文摘(2021年22期)2021-11-26 00:43:51
今日农业(2021年14期)2021-10-14 08:35:40
文苑(2020年6期)2020-06-22 08:41:52
文苑(2019年22期)2019-12-07 05:29:00
农业工程学报(2018年8期)2018-05-13 17:46:36
中国水利(2015年19期)2015-04-20 08:08:12
农家顾问(2014年6期)2014-06-30 23:01:58
新疆农垦科技(2014年8期)2014-02-28 19:20:39
