
模块化多APF并联环流抑制研究
2017-05-13 01:46禹华军金金
电气自动化 2017年1期
禹华军, 金金
(1. 上海电气风电设备有限公司,上海 200241;2.上海交通大学 电力传输与功率变换控制教育部重点实验室,上海 200240)
模块化多APF并联环流抑制研究
禹华军1, 金金2
(1. 上海电气风电设备有限公司,上海 200241;2.上海交通大学 电力传输与功率变换控制教育部重点实验室,上海 200240)
为研究解决模块化多APF的并联运行系统中的环流问题,根据环流产生的原因,提出了环流抑制的控制策略。正序、负序和零序协调控制的策略能够通过PI调节对装置电流大小进行调节从而消除环流,预测控制策略本身存在的超前特性能够消除信号延迟带来的装置电流相位差异,从而达到消除环流的目的。仿真结果验证了控制策略的可行性和有效性。
模块化多APF;并联运行;环流电流;正负零序协调控制;预测控制
0 引 言
随着现代工业的进步和电力电子技术的发展,各种电力电子装置在社会生产、生活等在各方面的广泛应用所引起的谐波危害也越来越严重[1-2]。尤其是采用风电、太阳能等分布式电源接入的微网结构中,谐波问题显得更加突出。采用高频开关变换技术的电力有源滤波器APF可以有效抑制谐波并补偿无功功率[3]。然而由于开关功率器件本身的容量限制,制约了单台APF补偿容量的提高,模块化APF并联运行得到大家的关注。但是,模块化多APF并联运行时也存在环流现象,国内外文献对于多APF并联运行的环流问题暂时还未涉及。因此研究采用模块化多APF并联运行以求获得更大的补偿容量具有重要的研究意义。
本文基于电容分裂式三相四线制不对称负载系统,在模块化多APF并联运行的情况下,由环流的定义出发,分析了环流产生的几种原因,对系统进行了模型分析和环流分析。针对装置电流大小存在差值以及相位存在偏差两种情况产生的环流,分别提出了正序、负序和零序协调控制策略和预测控制策略,并对两种方法进行了控制理论分析,最后通过仿真验证了本文所提出的抑制控制策略的正确性和可行性。
1 多APF并联的等效模型
1.1 多APF并联运行环流环路分析
如图1所示为n个公用直流电容的电容分裂式三相四线制APF并联运行系统。USabc为系统电压,iSabc为电网电流,iLabc为负载电流,iCabck为第k个APF输出电流(k=1,2,…,n),Ta1,Ta2, …,Tc1,Tc2为三相全桥电路中6个IGBT,Cdc1和Cdc2为直流侧上下电容,两个电容器中点与中性点N相连。逆变器采用LCL滤波器并网,其中C为滤波电容用以给高频分量提供低阻通路,L1为网侧滤波电感,L2为逆变器侧滤波电感,Rd为电容支路阻尼。

图1 多APF并联三相四线制结构
由图1可知,相比于多逆变器并联运行的拓扑结构,多APF并联运行增加了负载回路,并且APF的输出电流由负载需要补偿的电流总量决定。
1.2 环流建模
根据基尔霍夫电压定律,建立电容分裂式三相四线制单台APF的三相回路方程为:
(1)
其中uAjO、uBjO、uCjO分别为第j组APF的输出端口A、B、C三相电压,iCaj和iCAj分别为经过电感L1和L2的电流,usa、usb、usc分别为系统A相、B相和C相电压,uNO为APF中点对O点的电压。单台电容分裂式三相四线制的APF是一个三相相互独立的非耦合系统,可以将其等效为三个独立的单相半桥逆变电路[4]。以A相为例,由LCL滤波器的基本原理,在图1中把A相LCL电路看成:L1支路和电容支路C并联后再与L2支路串联。A相等效电路数学模型如下:网侧电感L1与电容支路C存在分流关系,所以网侧电流i1为:

(2)
其中i1和i2分别为电感L1电流和L2电流,XC和XL1分别为C回路和L1回路的电抗。整理公式(1)和公式(2),可以得到

(3)
根据环流的定义,可以推出多APF并联运行的各相环流表达式。

(y=a,b,cY=A,B,C)
(4)
Cy1、Cy2…Cyn分别为某相的环流,Zn为第n相电抗。
2 环流抑制策略
在多APF并联运行的系统中,理想状态下,各台APF同步运行,各装置电流大小和相位均同步,此时不会产生环流。然而实际情况并不能满足理想状态,各装置电流大小或者相位难免存在差值,从而导致系统产生环流。
当并联装置发出电流相位一样,大小存在偏差时,为了得到稳定的环流抑制控制策略,环流首先被分解为正序环流、负序环流和零序环流三部分,其分解表达式如公式(5)所示:
(5)
其中CZn,CPn,CNn分别为第n台APF的零序环流、正序环流和负序环流。
为了解决此时存在的环流问题,本文提出了一种正序、负序、零序环流协调控制策略,即分别对正序、负序、零序环流进行协调控制,得到环流控制所需要的调制波,再加入到系统控制中去,从而达到消除环流的目的。总的控制框图如图2所示。

图2 多机并联第j台机环流抑制控制图
如图2中所示,多APF并联运行时,要对第j台机进行环流抑制,首先提取第j台机的装置输出电流,对其进行前文中的公式转换可以得到第j台机的正序、负序和零序环流,然后对正、负、零序环流分别独立进行PI控制,并将经过PI控制之后得到的正序环流和负序环流的信号进行反变换,与得到零序环流抑制信号相加得到第j台机的环流抑制信号,此信号与APF谐波补偿信号进行叠加,经过PWM变换之后,最终得到第j台机子的工作指令信号。上述控制方法可以对多APF并联运行装置发出电流大小存在差异的情况进行环流控制,并能得到较好的环流抑制效果,具体效果将在后面的仿真分析中进行分析。
由前面的分析可知,当装置电流存在信号延迟时会产生相位差,从而也会导致装置之间存在环流。对于信号延迟产生的环流,要消除环流,只需要对延迟信号进行处理,消除信号的延迟即可消除环流。消除信号延迟,本文采取的是预测控制。预测控制是根据当前时刻的输入电流准确预测出下一个采样时刻的电流,这样必然会带来信号的超前,通过预测控制带来的信号超前来消除并联运行中存在的信号延迟,从而最终达到消除环流的目的[5]。

图3 预测控制框图
图3为图2中预测控制的原理拓展图,iCabcj(k)*为k时刻第j台APF装置的参考电流,iCabcj(k+1)*为预测出来的第k+1时刻第j台APF装置的参考电流。
针对k+1时刻的参考电流的常用预测方法有平推预测、拉格朗日二阶外插值预测[6,7]、重复预测以及各种预测方法的复合预测等[8]。平推预测常用于稳态电路,即利用上一周期的历史数据作为下一周期采样点的参考电流,预测电流如式(6)所示。拉格朗日二阶外插值预测既适用于稳态也适用于暂态电路,因考虑了各采样点参考电流的微小变化,因而比平推预测具有更高的预测精度。该方法利用拉格朗日二阶外插值定理,利用前三拍的历史数据来预测后一拍的参考电流,其预测电流如式(7)所示。
(6)
(7)
为了提高电流预测的精度,本文中采用了预测精度更高的拉格朗日二阶外插值预测来进行电流预测。从公式可以看出预测控制得出的电流具有超前特性,因此可以用来消除信号延迟所产生的环流。
3 仿真分析
为了验证本文提出模块化多APF并联运行的环流抑制策略的正确性和可行性, 在MATLAB/Simulink中按照图1的拓扑搭建了电容分裂式三相四线制多APF并联运行的仿真模型。为了方便研究,本文选取了两台机并联运行的情况进行仿真验证。系统仿真参数为:三相线电压Us=380 V,系统频率fs=50 Hz,开关频率f=10 kHz,LCL滤波器L1=0.02 mH,L2=1.18 mH,C=50 μF,Rd=3 Ω,直流侧电容Cdc1=Cdc2=10 mF。
3.1 多APF并联运行不平衡负载补偿
负载为中性点上下各跨接Rload1=6Ω的整流负载,其中A相单独添加了Ra=3Ω,La=3 mH的负载。对比图4(a)、图4(b)两图,可以看出,补偿前负载存在较大的谐波电流,并且存在明显的电流不平衡;补偿后,可以看出网侧电流中的谐波电流基本消除,不平衡也基本被全部补偿,从而可以看出多APF并联能够比较好地改善电网电流。

图4 多APF并联运行补偿效果
3.2 装置电流大小存在差异
由前文分析可知,当两台装置发出电流大小存在差异时,会产生环流电流。以A相装置电流为例,图5为两台装置发出电流大小存在差异时,两台机A相装置电流以及此时环流电流波形,因为APF需要补偿负载的谐波电流,所以装置电流中存在比较大的谐波电流。可以明显看出此时两台装置的发出电流大小存在差异,此时A相存在峰值5 A左右的不规则环流电流。图6为采取控制策略之后的两台装置A相电流以及环流电流波形,可以看出采取控制策略之后,两台装置的A相发出电流进行调整,电流大小基本相等,并且两台机的装置电流之和相比控制之前保持不变,而此时环流电流也基本被消除。由此可以验证本文提出的控制策略能有效在保证整个系统补偿电流总量不变的情况下,消除装置电流大小差异所产生的环流。

图5 补偿前A相装置电流以及环流电流波形
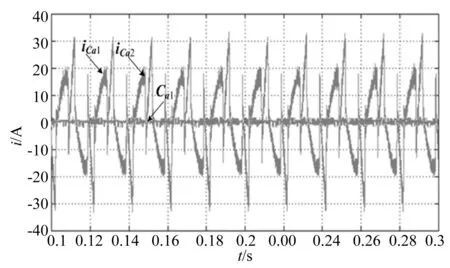
图6 补偿后A相装置电流以及环流电流波形
3.3 装置电流相位存在差异
由前文分析可知,当两台装置发出电流相位存在差异时,也会产生环流。以A相装置电流为例,图7为相位存在差异时,两台机A相装置电流以及此时环流电流波形,其中第二台机装置电流相位上存在一个采样时间的时间延迟。可以看出此时的两台装置发出电流大小相等,但存在相位偏差,此时的系统中会产生比较明显的环流电流。而采取了预测控制策略后,两台机A相装置电流以及此时环流电流波形如图8所示,可以看出,预测控制策略可以比较好地消除时间延迟带来的相位偏差,两台装置的发出电流大小和相位均一致,从而能比较好地消除环流电流,此时环流电流基本消除。

图7 补偿前A相装置电流以及环流电流波形

图8 补偿后A相装置电流以及环流电流波形
本文从环流定义出发,分别对环流产生的两种原因进行了仿真设计,并根据所提出的两种控制策略分别进行验证,由上述的仿真结果可以看出不管是装置电流的大小或者相位存在差异,本文所提出的控制策略均能比较好地抑制环流电流,从而可以验证本文所提出的控制策略的正确性和可行性。
4 结束语
本文以电容分裂式三相四线制模块化多APF并联运行的拓扑结构建立了模型,对多机并联运行时会产生装置环流的问题进行分析,并从环流定义出发,分别对环流产生的两种原因提出了控制策略,在此基础上进行了理论分析和仿真研究,最终得出结论:本文提出的正序、负序、零序电流控制策略能够在不改变装置总补偿电流的情况下,通过调节两台装置各自发出电流的大小,从而有效地抑制装置电流大小存在差异所导致的环流;而预测控制策略本身带来的信号超前的特性可以有效地消除延时影响,最终可以消除装置电流相位差异所导致的环流。
[1] 魏学良,戴坷,梁志珊,等.不平衡负载下并联有源电力滤波器的补偿性能[J].高电压技术,2008,34(6):1195-1200.
[2] 刘景远,张忠杰,万玉良,等.三相四线有源电力滤波器的仿真及实验[J].电力电子技术,2014,48(1):43-44.
[3] 卓放,杨君,王兆安.用于三相四线制系统的有源电力滤波器研究[J].西安交通大学学报,2003,3(34): 57-90.
[4] 王盼,刘飞,查晓明.基于有源阻尼的并联有源滤波器输出LCL滤波器设计[J].电力设备自动化,2013,33(4):161-166.
[5] 李国华,张影,汪玉凤,等.基于预测控制的有源电力滤波器选择性谐波补偿方法[J].电网技术,2014,38(10):2938-2942.
[6] 刘永强,严正,倪以信.双时间尺度电力系统动态模式降阶研究(二)系统降价与分析[J].电力系统自动化,2002,26 (19):1-6
[7] 韩郁,詹长江,赵炳良,等.三电平并联型电能质量调节器的控制技术研究[J].清华大学学报,2000,40(3):40-43.
[8] 何英杰,刘进军,王兆安,等.基于重复预测原理的三电平APF无差拍控制方法[J].电工技术学报,2010,25(2):114-120.
A Study on the Inhibition of Circulating Current in Modular Multi-APFs
Yu Huajun1, Jin Jin2
(1. Shanghai Electric Wind Power Equipment Co., Ltd., Shanghai 200241, China;2. Key Laboratory of Control of Power Transmission and Conversion of the Ministry of Education, Shanghai Jiaotong University, Shanghai 200240, China)
To solve the circulating current problem in the parallel operation system of modular multi-APF, this paper presents a control strategy for inhibition of circulating current in view of the causes of generation of circulating current. Through PI regulation, the coordinated control strategy for positive, negative and zero-sequence can adjust the current of the device so as to eliminate circulating current. The predictive control strategy has a time-advanced characteristic, which can eliminate phase difference caused by signal delay, thus attaining the purpose of eliminating circulating current. Simulation results verify the feasibility and validity of the proposed control strategy.
modular multi-APF; parallel operation; circulating current; coordinated control of positive; negative and zero-sequence; predictive control
10.3969/j.issn.1000-3886.2017.01.013
TM761
A
1000-3886(2017)01-0041-04
禹华军(1977-) 男,湖南人,博士,高级工程师,电力电子与电力传动专业。
定稿日期: 2016-06-14
猜你喜欢
四川电力技术(2022年6期)2023-01-30
粮食问题研究(2022年2期)2022-04-25
农村电气化(2021年10期)2021-10-19
上海大中型电机(2021年2期)2021-07-21
唐山学院学报(2020年3期)2020-09-14
西南交通大学学报(2018年6期)2018-12-18
通信电源技术(2018年5期)2018-08-23
儿童故事画报·智力大王(2016年6期)2016-09-14
电测与仪表(2016年8期)2016-04-15
通信电源技术(2016年5期)2016-03-22
