
基于GA和模糊小波神经网络的磁轴承控制方法
2017-05-13 23:35:28彭辉,曾碧
微特电机 2017年4期
彭 辉,曾 碧
(1.广西工业职业技术学院,南宁530001;2.广东工业大学,广州510006)
0 引 言
磁轴承(以下简称MB)利用磁力作用将转子悬浮于空中,使转子与定子之间没有机械接触,因此具有更长的寿命、更低的摩损、较高的转速以及无需润滑等特性[1]。但由于MB中的转子通过电磁力控制,当转子负载变化或存在外部干扰时,会由平衡位置发生偏移[2]。所以,MB中需要精确地对转子位置进行控制。
目前,对于MB转子稳定性的控制,常用的有比例-积分-微分(以下简称PID)技术[3],根据位置传感器检测到的偏移量实现反馈控制。然而PID存在参数整定困难,无法处理随时间变化的干扰[4]。为此,文献[5]提出了一种PID与神经网络(以下简称NN)相结合的控制方案(以下简称PIDNN),用来稳定全悬浮式五自由度MB转子,通过神经网络的自学习来调整最优PID参数。但其设定固定的学习率,在非线性系统中严重影响了学习性能。
在基于神经网络的控制技术中,可将小波函数与NN相结合形成小波神经网络(以下简称WNN)[6],其通过小波函数将信号分解到不同尺度上,然后利用时间序列和神经网络进行预测,最后将信号重构成完整预测信号。WNN具有收敛速度快,能够较好地解决非线性控制问题[7]。但是神经网络拓扑结构的选择缺乏理论分析,连接权重物理意义不明确。为此,学者引入模糊逻辑技术构建了模糊神经网络(以下简称FNN)[8]。
本文将WNN与FNN相结合,形成一种模糊-小波神经网络(以下简称F-WNN),并结合遗传算法(以下简称GA)构建一种MB控制系统。本文方法的创新点在于:
(1)首次将小波神经网络应用到MB控制系统中,并在MB建模过程中,融入了外部干扰,使其更贴近非线性现实场景。
(2)将WNN嵌入到FNN中,构建了一种适用于MB控制的模糊-小波神经网络(以下简称FWNN),利用神经网络的自学习能力和小波函数良好的局部特征来增强控制系统的自适应能力。
(3)利用GA算法对F-WNN学习过程中的学习率参数进行优化,提高神经网络的学习效率。
1 MB系统的动态建模
典型MB结构中通常采用差动驱动模式(以下简称DDM)[9],如图1所示。本文在DDM驱动模型中融入了提出的F-WNN控制器,用来控制驱动电压输出,以此稳定转子位置。
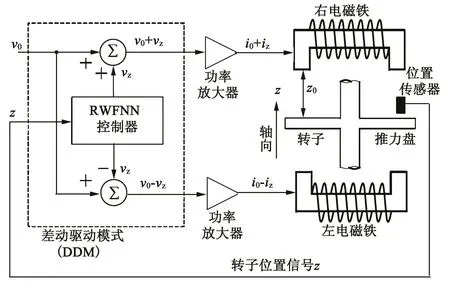
图1 MB结构和DDM驱动系统
MB结构中,推力盘固定在转子上,用于Z轴上转子位置的控制。此外,在DDM驱动系统中,左、右MB的偏置电流均被设置为最大允许电流的一半[10]。控制电流添加到电磁线圈中的偏置电流上,并从相反方向减去偏置电流。根据控制电流的动态调整,将转子位置z稳定到基准位置zm。其额定空隙z0的偏差可由转子位置z表示。此外,一个预先设计的偏置电压v0同时用于2个磁轴承,从而在推盘两侧产生相同的引力。另外,控制电压vz通过提出的F-WNN控制器获得。通过放大器将电压信号转换成电流信号,总电流为偏置电流i0和来自功率放大器控制电流iz的组合,电流通过线圈产生电磁力。
利用牛顿定律,MB控制系统的动态模型可以描述:

式中:m为转子质量;c为摩擦常数;Fz为电磁力,定义为Fz≡fz1-fz2,其中fz1和fz2分别为由右、左电磁铁产生的电磁力;fdz为外部干扰。
非线性电磁力被建模表示:

式中:k为与电磁铁铁心材料相关的电磁常数。
2 提出的F-WNN控制器
上文已将MB系统构建成一个非线性动力学模型。由于该模型的确切参数是未知的,所以本文提出一个6层F-WNN控制器来控制MB系统轴向转子的位置,使其对干扰具有鲁棒性。在F-WNN中,在FNN中嵌入了WNN,每个模糊规则对应一个子小波神经网络。不同分辨率级别的子网络用于捕捉动态系统不同的行为。此外,利用FNN中的模糊规则来确定各个子网络对F-WNN输出的贡献。与传统FNN,WNN相比,F-WNN的逼近精度和泛化能力可通过小波和模糊集的参数学习大大提高。
本文具有F-WNN控制器的MB整体控制系统结构如图2所示,主要分为2个部分:F-WNN控制器和MB电路。其中F-WNN控制器又分为2个部分:包含子WNN的F-WNN控制模块和基于GA的参数自适应学习模块。通过GA在线调整F-WNN的学习率,使其能够通过自学习获得最优F-WNN参数,进而准确地控制MB转子位置。
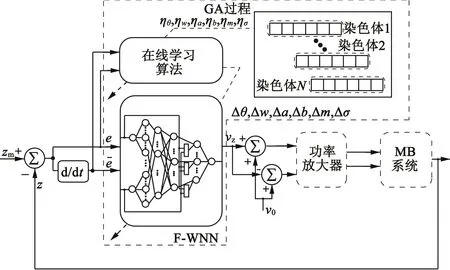
图2 具备F-WNN控制器的MB整体结构
2.1 F-WNN控制器
本文6层F-WNN结构如图3所示,F-WNN结构中的内部子WNN结构如图4所示。
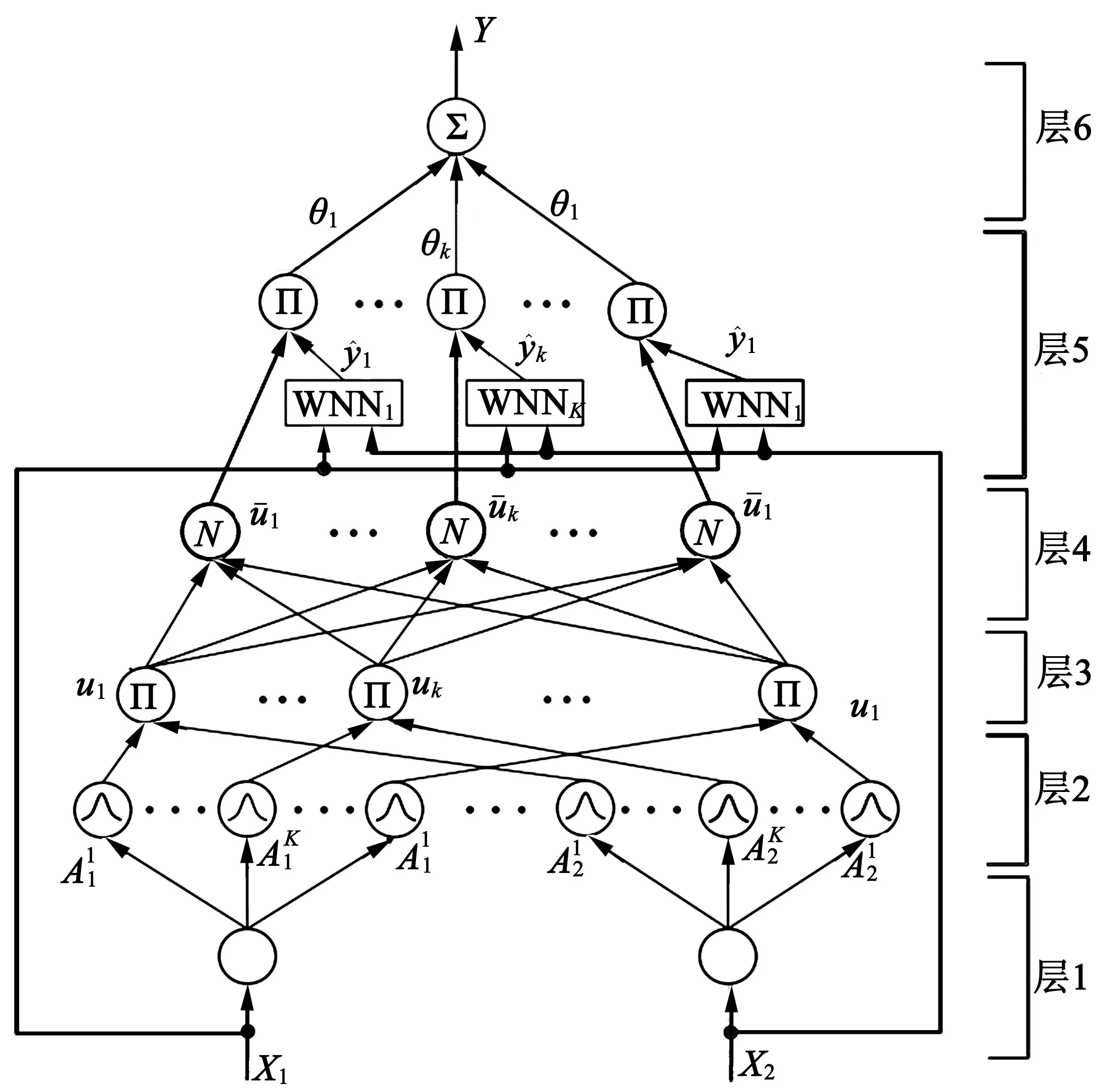
图3 所提出的6层F-WNN结构
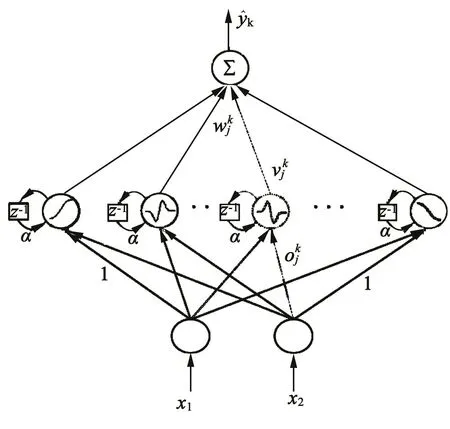
图4 内部子WNN的结构
所提出F-WNN的第k个模糊规则可表示:
规则k:IF x1是

式中:xi(i=1,2)为第i个输入,为与第k个模糊规则相对应的第i个输入的模糊集,l为模糊规则的数量。对于第k个子WNN,为隐藏层与输出层之间的连接权重;为隐藏层第j个神经元的输出;
^yk为输出,其为小波的线性组合。图3的F-WNN中,信号传播过程如下:
层1(输入层):该层中的节点只将输入信号传给下一层。在本文中,两个输入变量为跟踪误差x1(N)=e和推导的x2(N)=其中N表示迭代次数,位置误差定义为e≡zm-z。
层2(模糊化层):在这一层中,采用高斯函数作为隶属函数。对于第k个规则,有:

式中:和分别为与第k个模糊规则相关的第i个输入变量高斯函数的平均值和标准差。
层3(规则层):对于第k个规则节点,它的输出与其激活强度有关:

层4(规一化层):这一层中第k个节点,根据下面的方程计算第k个模糊规则的激活强度与所有模糊规则的总激活强度的比例:
层5(WNN层):将FNN的输出作为WNN的输入,每一条模糊规则对应一个小波网络。在内部子WNN中,隐藏层的神经元自相连接,以此提高学习效率,如图4所示。此外,将高斯函数g(x)=-x·exp[-(1/2)x2]的一阶导数作为子WNN隐藏层的小波母函数。隐藏层中第j个小波神经元对应的第k个子WNN的输入定义:


考虑到子WNN的输出如式(3)所示,那么,这一层的输出表示如下:

层6(输出层):输出节点作为一个解模糊器,表示如下:

式中:Y为F-WNN的输出,作为MB控制系统的控制信号vz。
2.2 参数在线学习
本文基于监督学习算法对F-WNN的参数进行在线学习,以此获得F-WNN的参数能量函数E定义:

通过应用能量函数E和梯度下降法,内部子WNN的参数可以通过以下公式得到:
式中:ηw,ηa和 ηb为学习率。推导式(12)~式(14)可得:
式中:δ=∂E/∂Y=(∂E/∂Z)(∂Z/∂Y)为一个误差项。同样,F-WNN的参数可以由以下式子得到:
式中:ηθ,ηm和 ησ为学习率。推导式(18)~式(20)可得到:
虽然学习算法中的误差项δ可以使用反向传播方法,以一个偏微分项来表示,但由于MB的动态不明性,致使不能准确得出δ中的灵敏度∂Z/∂Y。另外,∂Z/∂Y可以通过其符号函数来近似,但这会导致δ值的剧烈变化。为了克服这个问题,并提高FWNN的在线学习能力,误差项δ可以使用基于比例-微分控制概念的增量自适应定律代替[11]。

2.3 基于GA优化学习率
在上节描述的在线学习过程中,涉及6个学习率参数。在传统WNN或FNN中,通常设定为固定值。然而,较大的学习率会使学习过程出现振荡,较小的学习率会降低收敛速度,且固定的学习率不能很好地适应非线性控制过程[12]。为此,本文通过GA算法来自适应调整F-WNN的学习率因子ηθ,ηw,ηa,ηb,ηm和 ησ,以此提高 F-WNN 的在线学习能力。下面对GA算法进行简单介绍。
GA是一种模拟自然进化过程来寻找最优解的人工智能技术,包括以下主要步骤:染色体编码及初始化;染色体解码和适应度评估;交叉、突变、选择过程[13]。其中需要指明3个必要的参数:交叉率、突变率和停止条件。本文GA算法的基本步骤:(1)根据设定的初始6种学习率,在其值上下波动范围内随机构建N个染色体种群,并计算各染色体的适应度值。(2)根据比例选择法选择父代染色体,以交叉率Pc对2个父代染色体进行交叉过程,进而产生后代。然后执行突变率为Pm的突变过程,使后代染色体随机发生变化。(3)计算后代的适应度值,选择适应度较高的染色体作为下一代的父代。(4)迭代执行步骤(2),(3),直到达到停止条件,并输出最优染色体。GA算法流程图如图5所示。
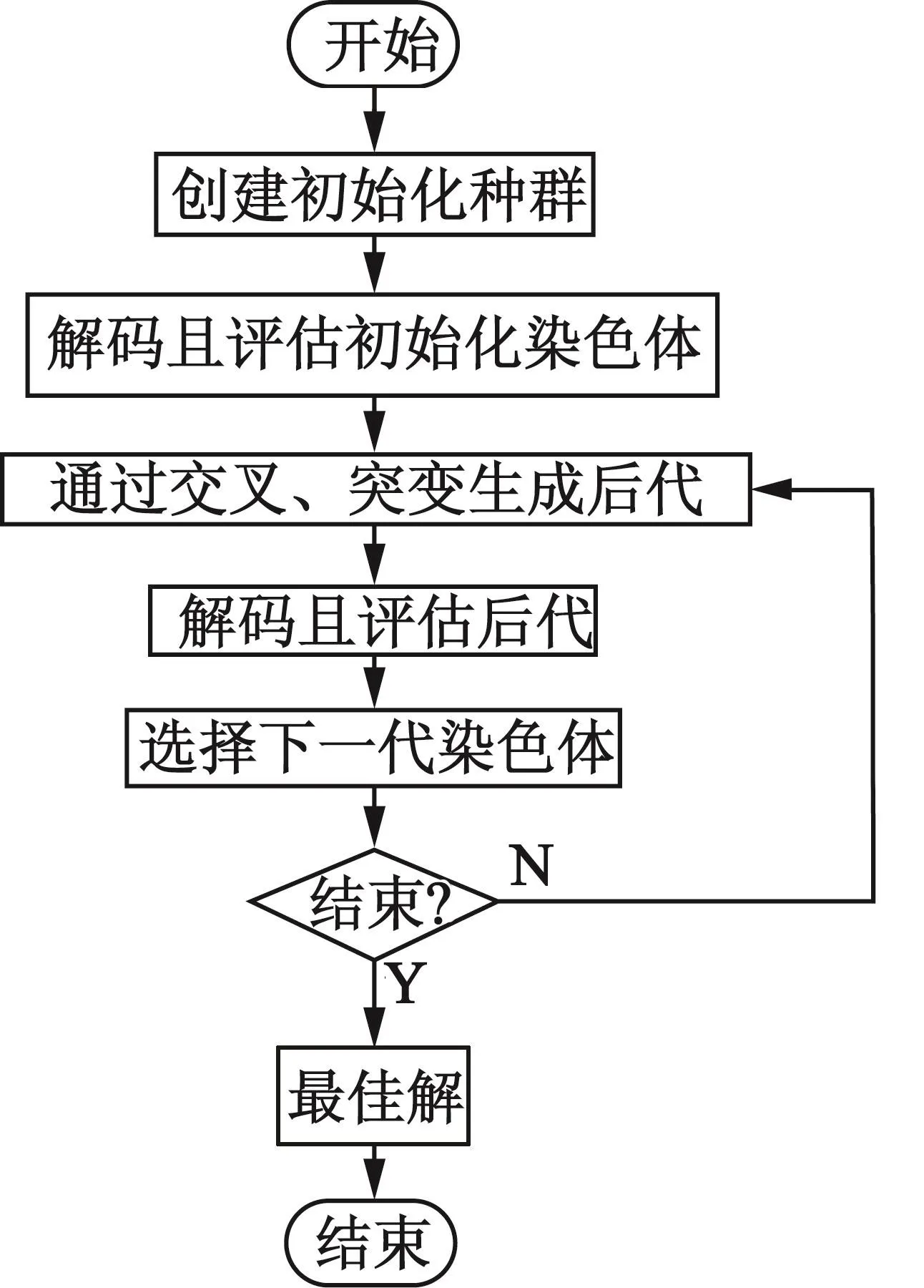
图5 本文GA算法流程图
初始种群为一组具有N个初始解的集合,每个解称为染色体或个体,其包含有限数量的基因。本文中的一个染色体包含6个基因,每个基因对应一种学习率,如图6所示。
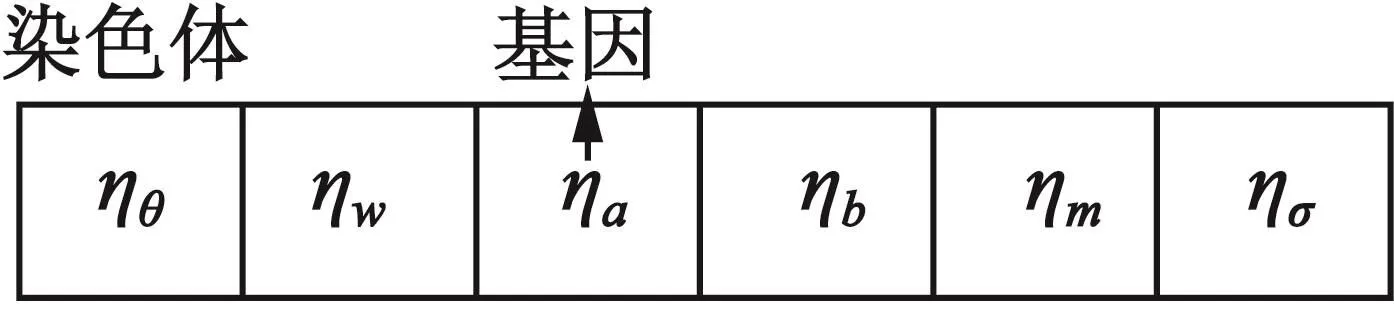
图6 染色体编码
本文基于控制器的跟踪误差构建一个适应度函数,用来计算染色体的适应度值FIT:

3 磁轴承控制的仿真分析
为了验证本文F-WNN控制器的性能,将其与传统PID控制器和文献[5]提出的PIDNN控制器进行比较。
3.1 仿真设置
使用MATLAB软件构建F-WNN控制器。对于MB,设置转子的质量为3 kg;摩擦常数c为0.001;MB系统额定空隙z0为0.5 mm,其中推力盘集中在2个相反的磁轴承之间;功率放大器的输入电压和输出电流比值为0.5 A/V;电磁常数k为8.47×10-6N·m2/A2;偏置电压v0为1.4 V,以实现最佳瞬态和稳态控制性能。
对于本文F-WNN控制器,设定所有初始学习率为0.2,自连接反馈增益α=0.15。对于GA,设定种群大小为20,交叉概率为Pc=0.6,突变概率为Pm=0.1,迭代次数为100。此外,对于PID控制器,设置控制参数Kp=25,Kd=0.5,Ki=20。
本文提出的F-WNN控制器中,其目的是在考虑外部扰动和系统参数变化下控制转子的位置。仿真实验中设定一个参考轨迹,通过转子对轨迹的跟踪误差来验证控制性能。设定时刻t(秒)处的参考轨迹zm(t)如下:

在本文仿真中,在1~1.5 s处施加一个大小约为50 N的随机扰动,并在3~5 s处,在转子上添加一个49 N的负载,来测试控制器的鲁棒性。
3.2 性能指标
本文性能度量:最大跟踪误差TM、平均跟踪误差TA和跟踪误差的标准偏差TS,表达式分别如下(R为测量次数):

式中:
3.3 仿真结果
仿真中,在初始时使用1 s的正弦波来训练FWNN和PIDNN的初始参数,随后利用实际数据来在线训练网络。另外,本文F-WNN的每个输入设计为3个隶属函数,因此,规则层有共有9个神经元,即 L=9。
首先,验证本文F-WNN控制器中的GA性能。图7(a)显示了本文GA求解F-WNN中6种学习率参数的收敛过程,7(b)显示了GA获得的最优学习率参数值。可以看出,本文GA能够快速地收敛到最优解,并获得适合当前环境的学习率。
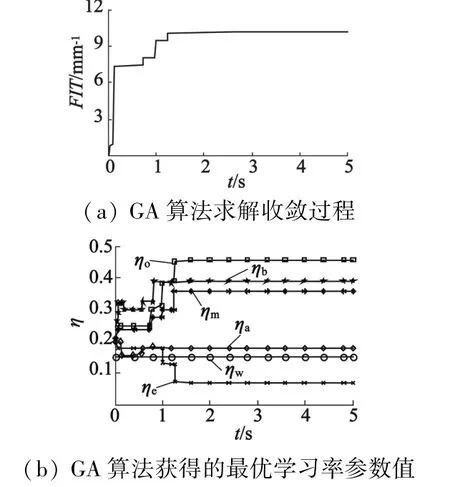
图7 GA算法求解最优学习率的收敛性和结果
图8 分别描述了3种控制方法的轨迹跟踪响应和跟踪误差曲线。可以看到,在时间1~1.5 s处,由于添加了额外的外部干扰,致使产生较大的位置误差。其中,PID控制器的误差最大,这是因为固定增益的PID控制器不能较好地处理不确定性。PIDNN控制器在一定程度改善了跟踪响应性能,但由于PIDNN逼近能力的限制,依然存在较大的跟踪误差。本文所介绍的F-WNN控制器在存在不确定因素情况下,依然能够获得满意的跟踪性能。这是因为,本文通过融合GA的在线学习算法,能有效地获得适应当前环境的最佳F-WNN参数,提高了FWNN的控制性能。
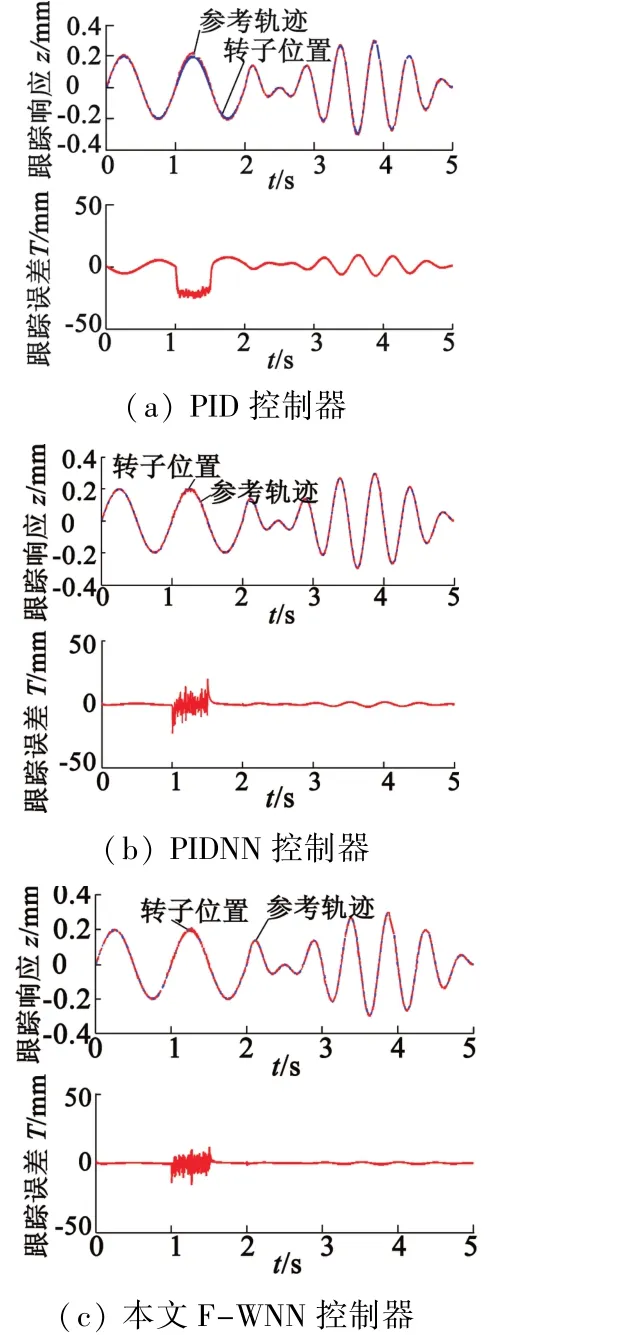
图8 3种方法的轨迹跟踪响应和跟踪误差
为了进一步比较各种MB控制方法的性能,各种控制方法的最大跟踪误差TM、平均跟踪误差TA和跟踪误差的标准差TS的比较结果如表1所示。可以看出,相比于PID控制器,PIDNN和F-WNN控制器的性能都有明显提升。其中,本文所介绍的FWNN控制器具有最优的控制精度,平均跟踪误差达到了0.73μm,比PID控制器降低了约6.5倍,比PIDNN控制器降低了约1.5倍。另外,本文 FWNN控制器的跟踪误差标准差值也较小,这说明其跟踪误差较为稳定。
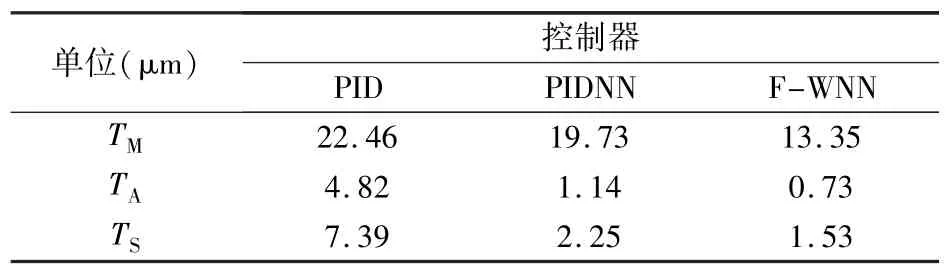
表1 各种MB控制方法的性能比较
综上仿真实验证明,本文所介绍的F-WNN控制器能够有效地控制高度非线性的MB系统。
4 结 语
本文提出一种基于融合GA的F-WNN控制方法,用于磁轴承转子的控制。在考虑外部干扰的情况下建模MB动态模型;通过监督学习机制对FWNN的参数进行在线学习,利用遗传算法(GA)优化学习率因子,以此提高F-WNN的性能;将转子位置误差作为F-WNN的输入,实现转子的自适应控制。在存在随机扰动和转子负载变化场景下进行仿真,结果表明,与现有其它方案相比,本文方法能够精确地控制转子跟踪预定轨迹,并获得了最低的平均误差和误差标准差。证明了本文F-WNN控制器能够对非线性动态MB系统进行干扰鲁棒控制。
在未来工作中,将在大量实际MB平台中进行实验,并考虑改进GA算法,进一步获得最优学习率。
参考文献
[1] 华春,邓智泉,刘程子,等.三自由度混合磁力轴承数字控制器的设计[J].微特电机,2013,41(1):47-49.
[2] 陈峻峰,刘昆.基于LMI的磁轴承-转子系统鲁棒增益调度控制器设计[J].国防科技大学学报,2011,33(6):134-138.
[3] PSONIS T K,NIKOLAKOPOULOS P G,MITRONIKAS E.Design of a PID controller for a linearized magnetic bearing[J].International Journal of Rotating Machinery,2015,32(5):1-12.
[4] 王喜莲,葛宝明,伍召莉.基于柔性神经网络自适应PID的磁轴承径向力控制[J].北京交通大学学报:自然科学版,2012,36(2):85-90.
[5] CHEN S Y,LIN F J.Decentralized PID neural network control for five degree-of-freedom active magneticbearing[J].Engineering Applications of Artificial Intelligence,2013,26(3):962-973.
[6] 党选举,徐小平,于晓明,等.永磁同步直线电机的小波神经网络控制[J].电机与控制学报,2013,17(1):43-50.
[7] EL-SOUSY F F M,FAYES F M.Hybrid-based wavelet-neuralnetwork tracking control for permanent-magnet synchronous motor servo drives[J].IEEE Transactions on Industrial Electronics,2010,57(9):3157-3166.
[8] CHIANG H K,CHU C T,LIN T C.Adaptive sliding mode recurrent fuzzy neural network estimator in magnetic bearing system[J].Applied Mechanics&Materials,2014,54(3):1487-1491.
[9] 王晓光,王秀珍.磁力轴承反向差动驱动控制研究[J].武汉理工大学学报(信息与管理工程版),2010,32(2):226-229.
[10] LIN F J,CHEN S Y,HUANG M S,et al.Intelligent double integral sliding-mode control for five-degree-of-freedom active magnetic bearing system[J].IET Control Theory&Applications,2011,5(11):1287-1303.
[11] DARBANDI S M,BEHZAD M,SALARIEH H,et al.Linear output feedback control of a three-pole magnetic bearing[J].IEEE/ASME Transactions on Mechatronics,2014,19(4):1-8.
[12] 董海鹰,魏占宏,杨玺,等.基于自适应模糊神经网络的风速软测量[J].电力系统及其自动化学报,2013,25(1):60-65.
[13] SHELKE S,CHALAM R V.Optimum power loss analysis of radial magnetic bearing using multi-objective genetic algorithm[J].International Journal of Computer Applications,2011,27(6):20-27.
猜你喜欢
哈尔滨轴承(2022年2期)2022-07-22 06:39:32
哈尔滨轴承(2022年1期)2022-05-23 13:13:24
小猕猴智力画刊(2022年3期)2022-03-29 01:09:42
哈尔滨轴承(2021年2期)2021-08-12 06:11:46
哈尔滨轴承(2021年1期)2021-07-21 05:43:16
数学小灵通(1-2年级)(2021年4期)2021-06-09 06:26:14
科学之谜(2019年3期)2019-03-28 10:29:44
科学之谜(2018年8期)2018-09-29 11:06:46
Coco薇(2017年11期)2018-01-03 20:59:57
暨南学报(哲学社会科学版)(2016年9期)2017-01-15 13:52:02
