
基于UDS的整车诊断系统设计方法
2017-05-13 01:36陈姿霖宋磊锋张龙岗
汽车电器 2017年4期
陈姿霖,宋磊锋,张龙岗,董 海
(陕西重型汽车有限公司汽车工程研究院,陕西 西安 710200)
基于UDS的整车诊断系统设计方法
陈姿霖,宋磊锋,张龙岗,董 海
(陕西重型汽车有限公司汽车工程研究院,陕西 西安 710200)
介绍基于UDS的整车诊断系统的设计思路和方法,分析设计过程中需要关注的硬件和软件方面的设计要点,系统地阐述整个设计过程。
诊断功能;诊断协议;硬件设计;软件设计
汽车电子控制系统的大量应用,提高了车辆性能,增加了新功能,同时也产生了新的问题。电控系统自身的故障,可能导致汽车失控和不能运行。从可靠性、安全性和可维护性的角度,汽车电控系统必须具备故障自诊断功能。而目前使用最广泛、最成熟的为CAN总线通信技术,诊断技术也就从基于K线过渡为CAN线,本文主要描述的是基于CAN总线的统一诊断的设计方法。
诊断功能主要是指在汽车运行过程中,电控单元不断监控系统各组成部分的工作情况,判断出具体的故障,以代码形式存储下来。同时启动相应跛行模式,使故障车辆能够被驾驶到修理厂进行维修,维修人员使用外部测试设备请求故障码,对故障进行快速定位和维修。诊断功能由硬件和软件两部分实现,硬件包括诊断设备、诊断接口、连接线束等;软件包括诊断协议、诊断策略、诊断代码、诊断数据库等。
1 诊断协议发展沿革
1994 年,美国汽车工程学会(SAE)在第1代车载诊断标准的基础上,统一了故障代码和软硬件结构,制定了第2代在线诊断标准OBD-Ⅱ(European On Board Diagnose),它侧重于与排放控制相关的诊断。随着OBD-Ⅱ标准被世界各汽车公司接受,该标准很快成为世界汽车工业标准,汽车故障诊断标准逐渐走向统一。
20世纪90年代,许多汽车厂商采用ISO 14230和ISO 9141诊断协议。而欧洲汽车领域广泛使用的车载诊断协议标准是KWP 2000(Keyword Protocol 2000),该协议最初是基于K线形成的一套完整的车载诊断服务,并且满足E-OBD标准。
2000 年,ISO制定了一种基于CAN总线的诊断系统通信标准ISO 15765,以ISO 14229-1定义的服务为基础,规范了基于CAN总线的诊断服务UDS on CAN(unified diagnostic services,统一诊断服务),包括网络定时、应用层定时等详细内容,并与ISO 14230应用层的服务和参数完全兼容。在使用CAN总线通信的车上,通过一套传输媒介,实现通信和诊断功能。UDS统一诊断服务是汽车诊断技术的通用诊断标准。陕汽目前使用ISO 15765诊断协议。
2 诊断系统硬件设计
2.1 诊断设备
采用统一的整车专用诊断设备,可以实现对整车电控系统的故障诊断、数据刷写、产品配置、功能检测等操作。
2.2 诊断接口
整车诊断接口采用ISO 15031中定义的DB16接口,如图1所示。诊断仪连接到接口上,通过6和14脚对控制器进行诊断。
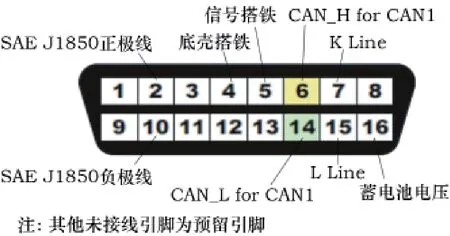
图1 DB16诊断接口
2.3 连接线束
陕汽车型通信系统使用的是成熟的CAN通信技术,诊断使用的是基于CAN总线的UDS诊断,二者使用一套传输媒介,采用非屏蔽双绞线,线束拓扑参数见图2,参数值要求见表1。
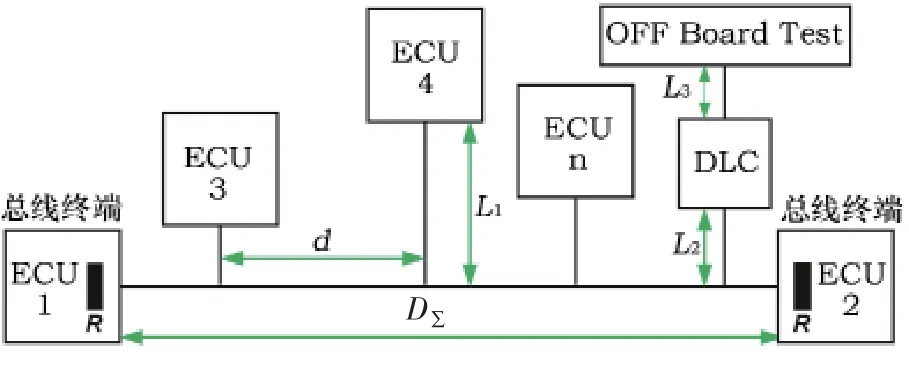
图2 网络拓扑结构参数示意图
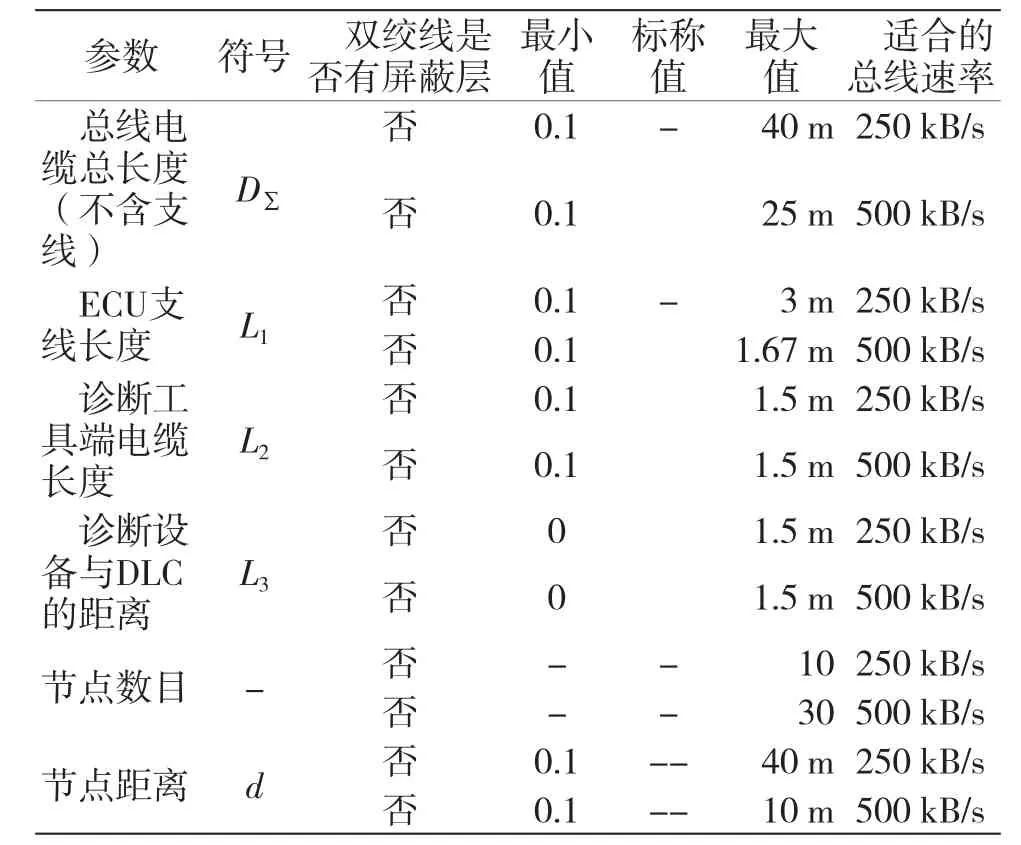
表1 网络拓扑结构参数数值要求
3 诊断系统软件设计
实现诊断功能的关键因素是诊断协议,它的作用是:描述一系列的诊断服务;定义ECU与诊断仪之间的请求响应规则;ECU对于请求报文的处理行为以及请求;响应报文信息含义。诊断协议是ECU与诊断仪之间进行诊断通信必不可少的一部分。诊断协议主要包括诊断ID、诊断服务、故障列表、数据标识符列表。
3.1 诊断协议
3.1.1 诊断报文ID和报文格式定义
诊断系统报文采用CAN扩展帧(29位标识符)形式发送,CAN标识符含义见表2。诊断系统设计了功能寻址和物理寻址2种寻址方式,CAN报文格式见表3、表4。N_PCI见表5。
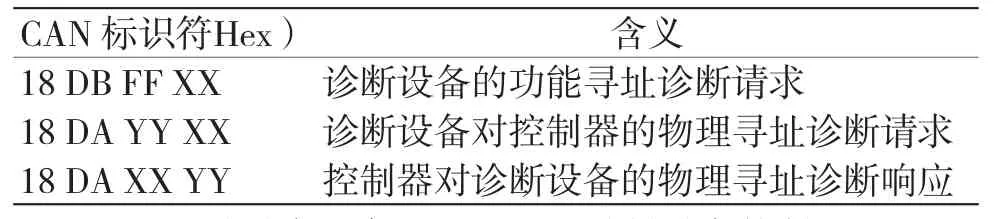
表2 诊断CAN标识符
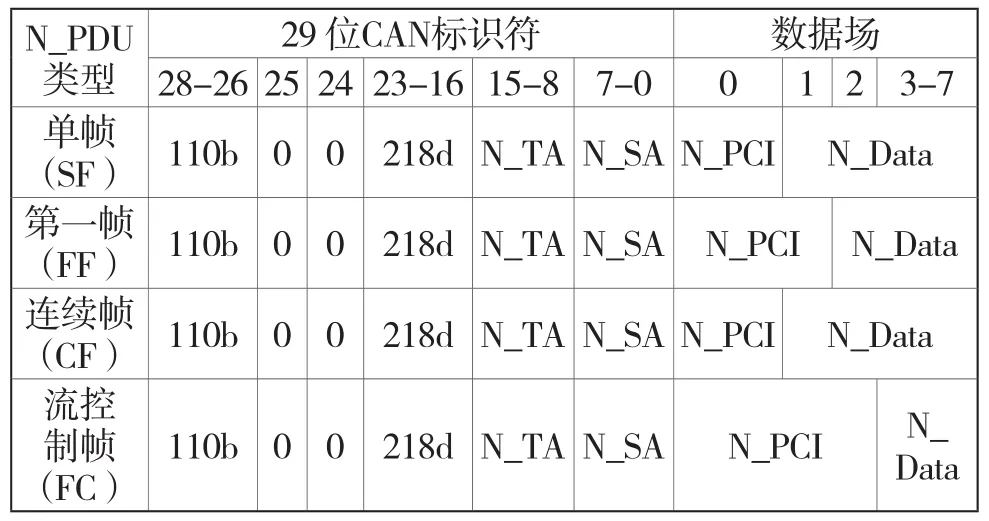
表3 物理寻址CAN帧格式
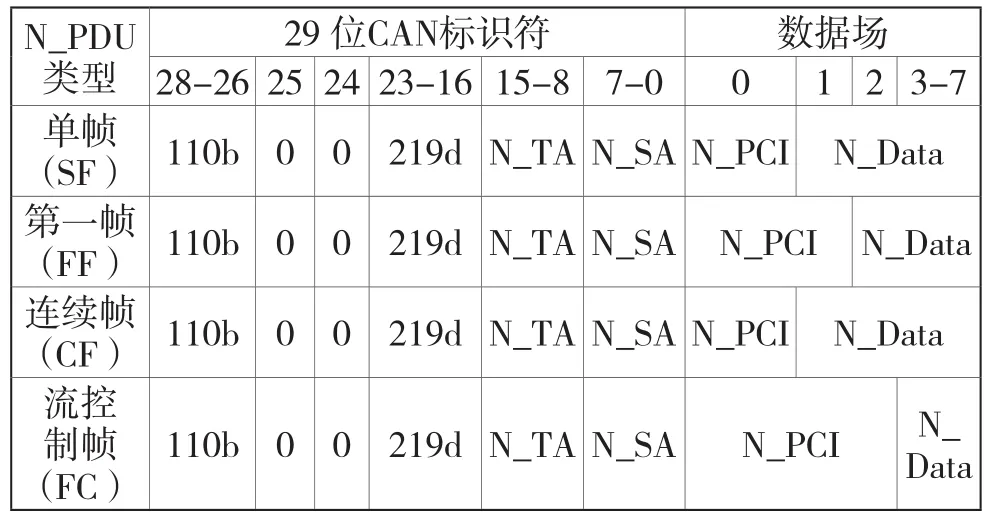
表4 功能寻址CAN帧格式
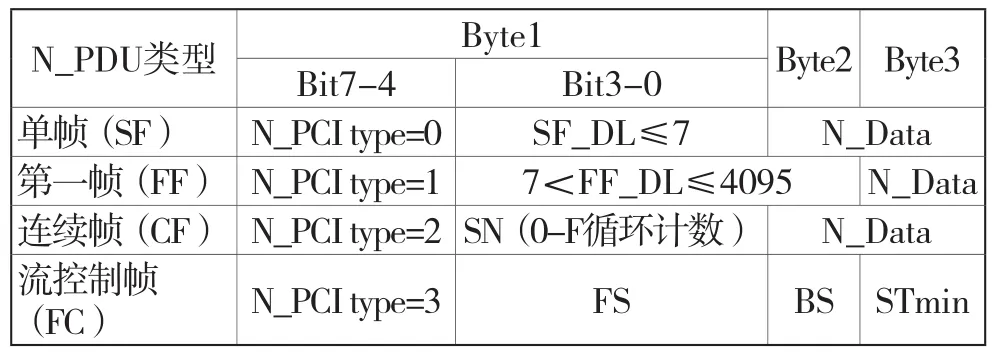
表5 N_PCI
3.1.2 诊断服务
根据陕汽车型的具体设计,从ISO 15765中选择UDS诊断服务用于诊断系统开发,如表6所示。
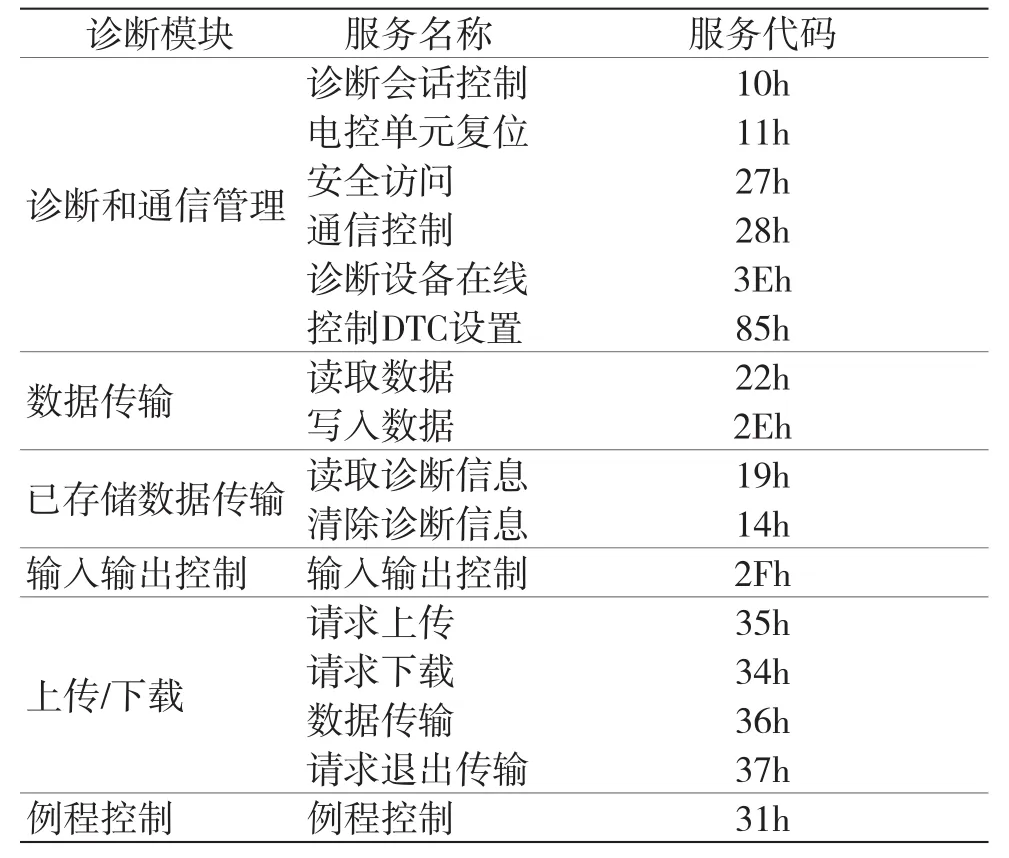
表6 UDS增强型诊断服务
3.1.3 诊断报文数据流
以诊断会话控制服务(10 h)为例,简单描述请求、肯定/否定应答报文传输的数据流,如表7~表10所示。

表7 诊断请求
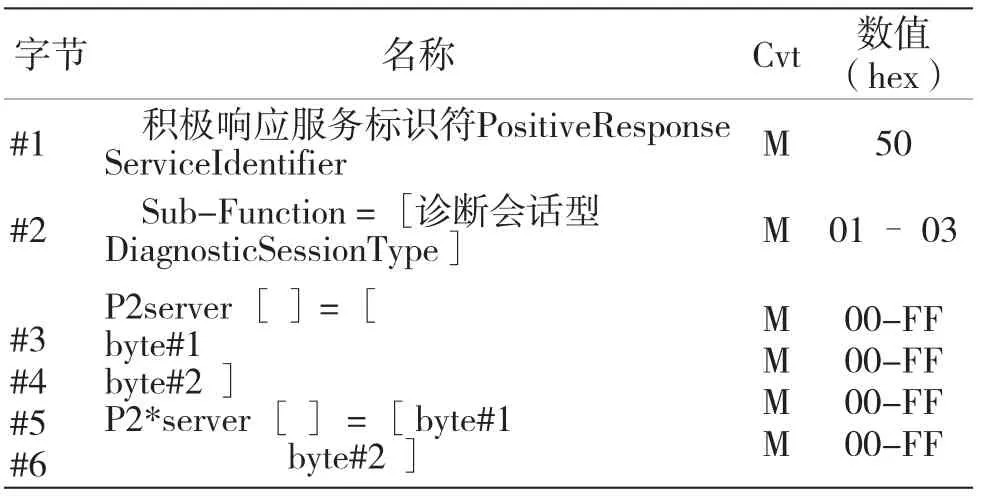
表8 肯定响应
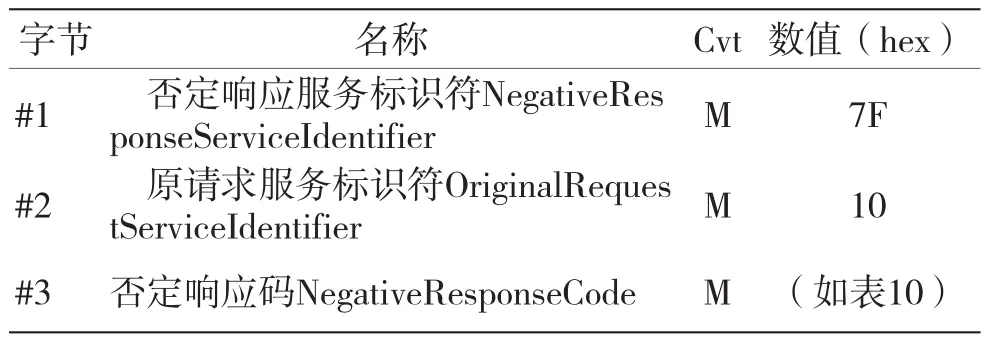
表9 否定响应

表10 否定响应码
肯定应答的服务标识符是在请求服务标识符的基础上加40 h;否定应答统一使用7Fh表示,具体否定的原因见否定响应码的定义。
3.2 诊断策略和诊断代码
控制器的诊断策略是根据驱动的选型来确定,并通过故障检测电路来实现。例如控制器驱动执行器通过继电器低边驱动,则能检测出继电器的开路、短路故障;通过MOSFET高边驱动,则能检测出开路、对搭铁短路故障。根据诊断协议编写诊断代码。图3为驱动电路图。
3.3 诊断数据库建立
根据控制器的诊断规范,使用CANdelaStudio软件编制cdd诊断数据库,使用CANdito软件加载cdd数据库后,对控制器进行诊断功能测试,如图4所示。
3.4 测试验证
根据控制器诊断规范,利用CANdito软件进行测试,根据数据流生成测试报告,测试阶段是反复进行测试-验证的过程,诊断功能测试报告见表11。
4 结束语
实现完美的自诊断系统,需要不断地对国际标准进行研究,对控制器进行测试和完善,这是诊断工程师的奋斗目标。
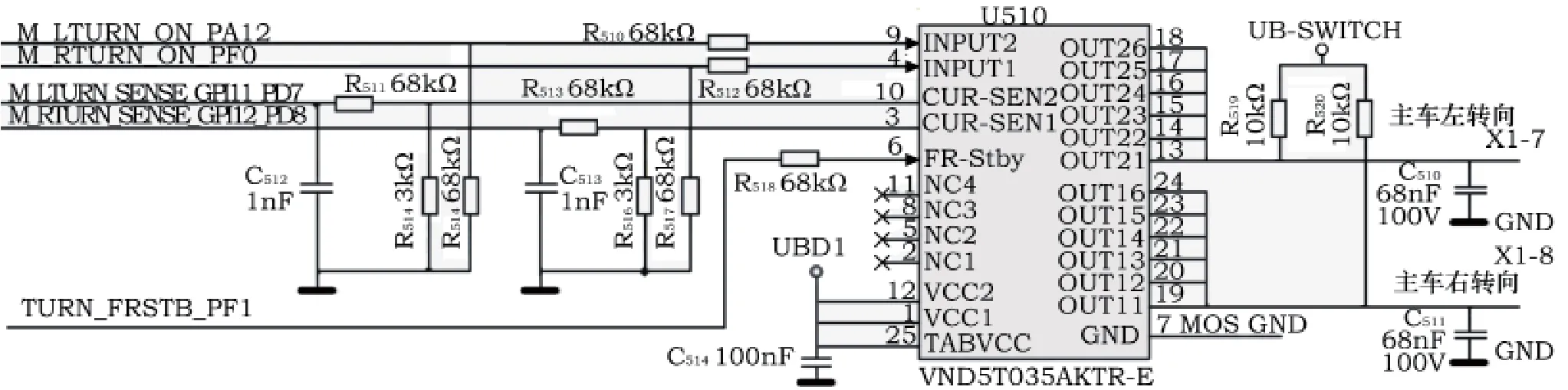
图3 驱动电路
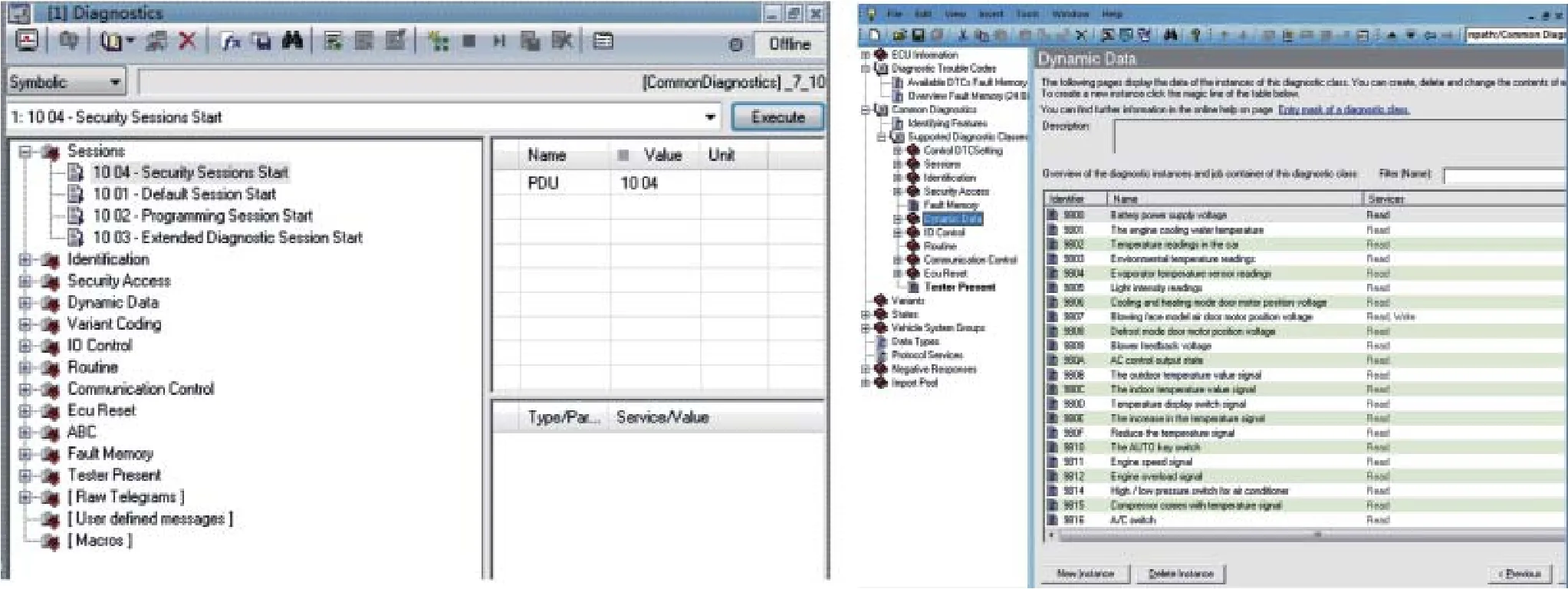
图4 CANdito和CANdealStudio

表11 诊断功能测试报告
[1] 罗峰,孙泽昌.汽车CAN总线系统原理、设计与应用[M].北京:电子工业出版社,2010.
[2] 鲁植雄.汽车CAN总线故障诊断图解[M].南京:江苏科学技术出版社,2009.
[3] 蔡浩.汽车故障诊断系统的设计和开发[D].上海:上海交通大学,2009.
[4] Road vehicles-Unified diagnostic services (UDS)-Specification and requirements[S].2006.
[5] Road vehicles-Controller area network(CAN)-Part 1:Data Link Layer and physical signaling[S].2003.
(编辑 心 翔)
Vehicle Diagnosis and Design Method Based On UDS
CHEN Zi-lin, SONG Lei-feng, ZHANG Long-gang, DONG Hai
(Automobile Engineering Research Institute, Shaanxi Heavy Duty Automobile Co., Ltd., Xi,an 710200, China)
This paper introduces design idea and method of vehicle diagnostic system based on UDS, analyzes key points in hardware and software design, and demonstrates the whole design process systematically.
diagnostic function;diagnostic protocol;hardware design;software design
U463.6
A
1003-8639(2017)04-0014-04
2016-08-26
陈姿霖(1984-),女,工程师,主要从事整车CAN总线系统和诊断系统设计研发及自动化测试工作;宋磊锋(1989-),男,工程师,主要从事整车CAN、LIN系统设计研发及自动化测试工作;张龙岗(1984-),男,工程师,主要从事计量设计工作;董海(1983-),男,工程师,主要从事自动化测试工作。
猜你喜欢
汽车电器(2022年9期)2022-11-07
电子技术与软件工程(2022年11期)2022-09-09
计算机应用(2022年8期)2022-08-24
台湾农业探索(2020年4期)2020-10-29
计算机系统应用(2020年8期)2020-03-22
台湾农业探索(2019年5期)2019-09-10
中国外汇(2019年11期)2019-08-27
雷达与对抗(2019年4期)2019-03-10
汽车维修与保养(2018年1期)2018-04-20
汽车文摘(2016年12期)2016-12-07
