
自平衡车的电流环串级PID控制设计*
2017-05-12 09:41林嘉裕戴廷飞熊慧
单片机与嵌入式系统应用 2017年5期
林嘉裕,戴廷飞,熊慧
(天津工业大学 电气工程与自动化学院,天津 300387)
自平衡车的电流环串级PID控制设计*
林嘉裕,戴廷飞,熊慧
(天津工业大学 电气工程与自动化学院,天津 300387)
为了解决两轮自平衡电动车用传统占空比控制无法实现对转矩的精确控制问题,本文采用飞思卡尔微处理器MK60DN512ZVLQ10,卡尔曼滤波算法获取车身倾角实时最优值,基于电流环的串级PID控制来调节直流电机。电流传感器精度能达到1%左右,系统受扰动后,此方法调节时间更短、超调量更小、鲁棒性更强。实验结果表明,直接转矩控制在快速性、稳定性和抗扰性等方面明显优于传统占空比控制。
卡尔曼滤波算法;电流环;串级PID控制;MK60DN512ZVLQ10
引 言
两轮自平衡电动车以其具有结构简单、转弯灵活、无刹车、易于驾驶和环保节能等优点,已经成为移动机器人领域的一大研究热点[1]。以第十届全国大学生智能汽车竞赛为背景,本设计采用直接转矩控制在平衡组比赛中取得全国二等奖,验证了此方法的可行性。两轮电动平衡车系统是一个不稳定的非线性系统,其时变、耦合、参数不确定的特点也导致其电机控制的复杂性,因此电机的选型也对控制的难度与效果起着一定的影响。交流电机虽有很多优点如结构稳固,运行稳健可靠,成本低廉和高效率等而被广泛使用,但交流电机可控制性不如直流电机[2]。
平衡车精确的控制是建立在准确的姿态测量基础上的,参考文献[3-4]提出利用卡尔曼信号融合滤波的方法,解决了惯性传感器在两轮平衡车姿态测量中存在的随机漂移误差问题。传统的平衡车控制都是采用占空比控制[5-10],系统控制比较简单,但是实际上占空比同时作用在转矩和转速上,无法准确地控制电机转矩。
直立车控制的过程中需要实现精确地转矩控制和速度控制,因此本文使用直流无刷电机,以反应更为迅速的电流环作为内环,对电机进行直接转矩控制,这样可以精确的控制电机的输出转矩。此外,在转向时对两侧电机差动转矩进行了直接控制,有效的防止转向时由于两侧电机差动转矩不同导致身角度的改变。
1 系统整体设计
本设计要求平衡车能够完成保持平稳姿态载人运行,并且转向可以由操纵者通过摇杆来操控。为保证使用者的安全,本设计采用如图1所示的设计思路,利用飞思卡尔芯片MK60DN512ZVLQ10作为主控制器,用来采集姿态传感器、电流传感器以及转向电位器的信号,经过数据处理与运算后,把控制信号输出到BLDCM驱动器来控制电机。同时,采集的数据可以通过无线通信模块上传到PC上位机上,控制参数也可以在上位机上修改后发送到主控制器上,方便调试。

图1 系统整体框图
2 硬件电路设计
2.1 电机驱动模块整体结构
图2为电机驱动模块整体结构图,该模块主要由过流保护模块、电流检测模块和电机驱动电路构成。电机驱动部分,结构上使用最常见的三相全桥式换相器结构,控制策略上采用两两通电方式。在该模块中,6只MOS管构成了功率逆变器,通过控制电路给出的控制信号,使得每次换相上下桥臂各有一只MOS管导通,为三相定子绕组提供直流电源。该电路中电机采用Y型连接,在一个周期中,每隔60°电角度换相一次,每个MOS管通电120°,每个绕组通电为240°,正向反向通电各120°。

图2 驱动模块整体结构图
2.2 电流检测模块
电流检测模块的设计使用电流检测芯片AD8210,其为一款高压电流检测放大器。电流流经采样电阻,转化成差分电压,AD8210内置放大器对电压进行放大,放大增益为20 dB,可以实现精确的差分输入电压测量。
图3为本设计的电流检测模块原理图,在电机驱动回路中串入一个3 mΩ的精密合金电阻作为采样电阻,AD8210放大系数为20。单片机的A/D采样最大值为3.3 V,因此AD8210的采样输出必须调整为0~3.3 V,电流模块的最大量程如下所示:
(1)
因此该模块的量程为-27.5~+27.5 A,大于本设计使用的直流无刷电机堵转电流,因此该模块可以满足控制要求。
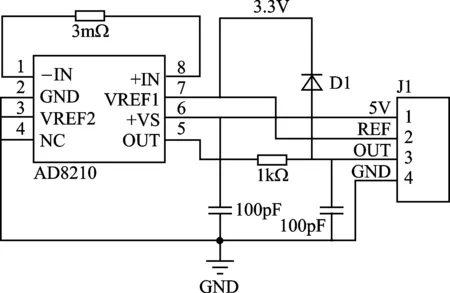
图3 电流检测模块电路
2.3 过流检测模块
在电机运行的过程中由于短路和电机堵转等原因都会产生过流现象,不及时处理会导致电机损伤甚至对人体造成伤害,因此本设计加入了过流检测模块。该模块检测电流部分同上文介绍。如图4所示,为过流判断模块电路图。该模块为一个比较电路,同相端为AD8210输出电压,反相端为给定的阈值,当电流大时,AD8210的输出电压大于阈值电压,此时比较器输出高电压,经过三极管驱动电路控制蜂鸣器发出报警信号,同时单片机也能够根据比较器输出端的电平变换,采取相应保护措施。

图4 过流检测模块电路
3 软件设计
3.1 系统控制原理
两轮自平衡电动车实际是一种典型的一级倒立摆模型,对于系统的数学模型已经有了许多的研究[11-13]。两轮自平衡电动车的动平衡控制是通过惯性传感器MPU6050获取平衡车的角速度和倾角加速度,将此信息传到微处理器中,经过卡尔曼滤波算法估计最优姿态角,最后通过合适的控制算法算出两个电机的控制量,从而驱动左右两侧电机加速或减速,产生向前或向后的加速度,使车体保持平衡。
平衡车的控制本质是车轮的转矩控制,而永磁直流无刷电机输出转矩在永磁体磁性不变的情况下,基本与电枢电流成线性关系。因此控制电机的转矩,只需要控制电机的电流,这样就构成了以电流环为内环,角度环为系统主回路的三闭环串级PID控制系统。
控制系统框图如图5所示,图中ω′为车体角速度,θ′为车体角度。在三闭环平衡控制的基础上加上转向控制,只需采用一个转向电位器,经过前馈控制器计算出两侧电机的差动转矩,根据电机电磁转矩与电枢电流的关系,即可得到两侧电机转动所需的差动电流±I,由电流闭环调节电机的输出。

图5 控制系统框图
3.2 系统算法设计
从系统的控制原理以及要实现的功能来看,需要有姿态估计卡尔曼滤波算法和电流环串级控制算法。
3.2.1 卡尔曼滤波算法
卡尔曼滤波器是匈牙利数学家卡尔曼(Kalman)于20世纪60年代提出的用于时变线性系统的最优线性递归滤波器[14],因此卡尔曼滤波本质上是一种递归型的状态估计器。通常卡尔曼滤波包括两步:一是状态预测,即通过状态方程来求得状态预测向量和误差协方差预测向量;二是状态修正,即通过观测方程来修正状态预测向量,最后求解最小误差协方差矩阵的过程。在平衡车上,显然要实现精确的控制关键在于姿态角的精确估计。根据卡尔曼滤波理论,k时刻姿态角的估计,必须由(k-1)时刻的姿态角来预测,同时获得k时刻的高斯噪声偏差。本设计用MPU6050的陀螺仪测量的角速度值作为预测量,以加速度计测得的角度值作为观测量,利用两者协方差不断递归运算以求得最优姿态角。
3.2.2 电流环串级控制算法
在本设计中,由于受控制器运算速度的限制,姿态估计算法输出间隔为5 ms,加入了角速度环和电流环构成串级控制,角度环作为主回路,角速度环和电流环作为副回路,把系统的控制周期从5 ms缩短到1 ms,1 ms为电流环的控制周期。转向控制采用转向电位器,电位器经过一个前馈控制器可以算出左右两电机期望的差动电流,和角速度环输出叠加起来作为电流环的期望电流。在控制规律的选择上,由于对电枢电流采样过程中存在采样噪声,不适合进行微分控制,电流环最终采用PI控制,角度环采用PD控制和角速度环采用PID控制。电流环串级控制算法流程如图6所示。
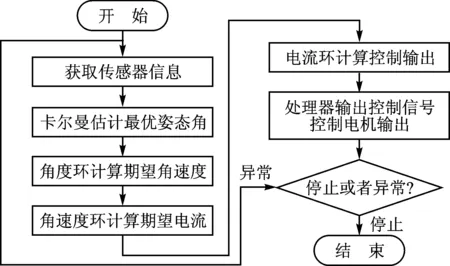
图6 电流环串级控制算法流程
4 实验结果与分析
4.1 电流检测电路测试
在对电流检测模块进行性能测试与分析时,本文主要以静态性能测试为主,重点对该模块的相对误差进行分析。测量时将采样电阻与2 Ω的功率电阻串联,接到驱动板H桥电路的输出端,驱动板由电压为15 V左右的锂电池供电,驱动板输出电压=电池电压×占空比。通过单片机设置不同占空比的PWM,就可以构造出有效值不同的电压信号,电压与电阻的比值即为电流的真值,将真值与测量值进行比较就可以得到相对误差r,如图7和图8所示,分别为占空比为60%和40%时驱动板输出电压以及检测模块输出电压的波形图。
根据波形图可以得到以下结论:式(2)和式(3)分别为占空比为60%和40%时相对误差计算公式。以占空比60%为例,驱动板输出平均电压U为8.91 V,忽略采样电阻的阻值Rm(阻值0.003 Ω),回路总电阻R为2 Ω,差动放大器增益A为20,电流检测模块输出电压平均值为270 mV,相对误差为1%。同理可得,占空比为40%时,相对误差为0.92%。
(2)
(3)
由以上两组数据可以看出,相对误差在1%左右,误差较小,满足电流环控制系统的精度要求。

图7 占空比为60%时检测模块与驱动板输出电压

图8 占空比为40%时检测模块与驱动板输出电压
4.2 姿态平衡控制实验

图9 占空比控制与直接转矩控制车身倾角响应
先整定电流环的参数,选取PI参数分别为P=1.25,I=0.24。通过键盘的调试方式确定角度环和角速度环的参数,最终角度环的PD参数分别为P=30,D=0.5。角速度环的PID参数分别为P=1.2,I=0.000 1,D=0.3。从车身18°左右启动,分别测量占空比控制和直接转矩控制的倾角响应。图9是占空比控制与直接转矩控制车身倾角响应,其中上图为占空比控制,下图为直接转矩控制,纵坐标均为车身倾角度数。
4.3 鲁棒性实验
在相同的平衡条件下,在同一时间对平衡车加入扰动作用,分别对传统占空比控制和直接转矩控制进行实验。图10是扰动作用下占空比控制与直接转矩控制的车身倾角响应。上图为占空比控制,下图为直接转矩控制。

图10 扰动作用下的车身倾角响应
4.4 实验结果对比分析
表1为的动态性能对比可见,直接转矩控制调节时间更短,超调量更小,平衡角受扰动后恢复更快。实验结果表明,直接转矩控制的平衡车受到扰动作用的影响较小,能快速平稳地回到平衡状态,而传统占空比控制的平衡车受到扰动作用后回到平衡状态经过了一段时间的波动。

表1 两种不同控制方法动态性能比较
因此,引入电流环的平衡车电机控制方法提高了系统的快速性、稳定性和鲁棒性,其控制效果明显优于传统占空比控制。
结 语

[1] 梁文宇, 周惠兴, 曹荣敏, 等. 双轮载人自平衡控制系统研究综述[J]. 控制工程, 2010(s2):139-144.
[2] 童玲. 基于DSP的交流电机双闭环控制系统设计[J]. 现代机械, 2008(6):47-49.
[3] 郜园园, 阮晓钢, 宋洪军, 等. 两轮自平衡机器人惯性传感器滤波问题的研究[J]. 传感技术学报, 2010,23(5):696-700.
[4] 张团善, 何颖. 卡尔曼滤波在两轮自平衡代步车姿态检测中的应用[J]. 单片机与嵌入式系统应用, 2014(5):33-35.
[5] 董锟, 韩帅, 孙继龙, 等. 两轮自平衡智能车系统设计[J]. 单片机与嵌入式系统应用, 2013,13(1):71-74.
[6] 杨雪, 高成恩, 高攀, 等. 基于电磁场检测的寻迹智能车系统设计[J]. 单片机与嵌入式系统应用, 2011,11(12):61-64.
[7] 袁洪跃. 自平衡两轮电动车控制系统设计[D]. 重庆:重庆大学, 2012.
[8] 孔祥宣. 自主式双轮动态平衡移动机器人的控制系统研究[D]. 上海:上海交通大学, 2007.
[9] 魏文, 段晨东, 高精隆, 等. 基于数据融合的两轮自平衡小车控制系统设计[J]. 电子技术应用, 2013,39(5):79-81.
[10] 周牡丹, 康恺, 蔡普郎, 等. 两轮自平衡车控制系统的设计与实现[J]. 自动化技术与应用, 2014,33(10):4-8.
[11] 阮晓钢, 刘江, 狄海江, 等. 两轮自平衡机器人系统设计、建模及LQ控制[J]. 现代电子技术, 2008,31(18):57-60.
[12] 孙军, 万明伦, 吕博, 等. 平衡车机电控制系统建模与仿真[J]. 机械与电子,2010(10):34-37.
[13] 薛凡, 孙京诰, 严怀成. 两轮平衡车的建模与控制研究[J]. 化工自动化及仪表, 2012,39(11):67-71.
[14] Selin I. The Kalman filter and nonlinear estimates of multivariate normal processes[J]. IEEE Transactions on Automatic Control, 1964,9(3):319.
林嘉裕、戴廷飞(本科生),熊慧(副教授):主要研究方向为嵌入式系统应用、智能控制、生物医学电子学等。
ST联合DSP Group和Sensory研制声控设备关键字智能麦克风
意法半导体 (STMicroelectronics,简称ST)与全球领先的融合通信无线芯片组解决方案提供商DSP Group 有限公司和全球最大的语音界面和关键字检测算法开发商 Sensory有限公司,联合公布了高能效语音检测处理麦克风的技术细节。该麦克风封装紧凑,具有关键字识别功能。
这款器件在微型系统封装(SiP)内集成意法半导体的低功耗MEMS麦克风、DSP Group的超低功耗语音处理芯片和 Sensory的语音识别固件,利用意法半导体的先进封装技术取得了非常好的轻量型封装、极长的续航时间和先进的功能。
Current Loop Cascade PID Control Design of Self-balanced Vehicle
Lin Jiayu,Dai Tingfei,Xiong Hui
(School of Electrical Engineering and Automation,Tianjin Polytechnic University,Tianjin 300387,China)
In order to solve the problem that the traditional duty cycle control of two-wheeled self-balancing electric vehicle can not realize the accurate control of torque,the design uses MK60DN512ZVLQ10 as the core,the real-time inclination angle of vehicle body is obtained by kalman filter algorithm,the loop cascade PID control is used to regulate the DC motor.The accuracy of the current sensor can reach about 1%,when the system is disturbed,this method has the shorter settling time,the smaller overshoot and the stronger robustness.So the direct torque control is superior to conventional duty control in terms of fastness,stability and immunity.
Kalman filter algorithm;current loop;cascade PID control;MK60DN512ZVLQ10
2015年国家级大学生创新创业项目(201510058052)。
TP212.9;TP273
A
迪娜
2017-01-09)
猜你喜欢
汽车实用技术(2022年7期)2022-04-20
房地产导刊(2020年11期)2020-12-28
铁道通信信号(2019年4期)2019-10-10
四川冶金(2018年1期)2018-09-25
北京航空航天大学学报(2017年9期)2017-12-18
通信电源技术(2016年1期)2016-04-16
通信电源技术(2016年1期)2016-04-16
电源技术(2016年9期)2016-02-27
电源技术(2015年1期)2015-08-22
电机与控制应用(2015年3期)2015-03-01
