自动剖面浮标研究现状及展望
2017-05-12 11:28:58潘彬彬曹正良崔维成
海洋技术学报 2017年2期
陈 鹿 ,潘彬彬,曹正良,崔维成
(1.上海海洋大学 海洋科学学院 深渊科学与技术研究中心,上海 201306;2.上海深渊科学工程技术研究中心,上海 201306)
自动剖面浮标研究现状及展望
陈 鹿 ,潘彬彬,曹正良,崔维成*
(1.上海海洋大学 海洋科学学院 深渊科学与技术研究中心,上海 201306;2.上海深渊科学工程技术研究中心,上海 201306)
回顾了自动剖面浮标的发展历程,自动剖面浮标由Swollow提出的中性浮子发展而来,演变到现在的PROVOR型、APEX型、SOLO型等自动剖面浮标。文中介绍了Argo计划中几种主要的自动剖面浮标,其浮力调节原理主要是通过改变浮标在水中的排水体积实现自动沉浮,从而测量水的温度、盐度、深度等数据。对常规(<2 000 m)和深海(>2 000 m)自动剖面浮标进行比较,大部分深海自动剖面浮标耐压结构已经采用球形设计,浮标受压后变形小且可减轻浮标自重;单冲程柱塞泵改变为体积较小的液压泵,提供超高压的同时可以充分利用球体空间。目前,常规自动剖面浮标已广泛应用到海洋环境数据的调查、收集,而深海自动剖面浮标仍处于研发与试验阶段,面临诸多的技术挑战,对浮标的可靠性提出了更高的要求。
自动剖面浮标;发展历程;浮力调节;技术挑战;发展方向
自动剖面浮标也就是“自律式拉格朗日环流剖面观测浮标”或“自持式剖面自动循环探测仪”,是一种可以在海洋中自由漂移,采用拉格朗日环流法自动测量海面到一定水深的海水温度、电导率(盐度)和压力,并跟踪其漂流轨迹来获取海流的速度和方向的测量仪器[1]。
美国和日本等国家的大气、海洋科学家在1998年提出了全球海洋实时观测计划,构想用3~5 a时间(2000-2004年)在全球大洋中每隔300 km布放一个卫星跟踪浮标,由总计为3 000个的自动剖面浮标组成一个庞大的全球海洋观测网,该计划称之为“Argo计划”,在该计划中使用的自动剖面浮标称为“Argo浮标”[1]。“Argo计划”促进了自动剖面浮标的发展。
自动剖面浮标组网后可以快速、准确、大范围地收集全球海洋上层的海水温度、电导率(盐度)、压力等剖面资料,这些资料的应用有利于提高对全球海洋热储存总量的估算精度,提高对全球温室效应引起的全球气候变暖与海平面上升的预报精度,帮助预测未来发展趋势,在改进季节性气候预报和加深对飓风、台风活动的认识中起到了关键作用。提高气候预报的精度,能够有效防御全球日益严重的气候灾害[2]。
此外,自动剖面浮标获取的资料对预测开阔大洋上溢油的影响以及帮助和指导远洋渔业生产等都具有极高的应用价值。在印度洋已经开始用Argo浮标监测次表层温度与盐度的变化,监测结果将有助于分析这种变化是自然变异的一部分,还是由于人类活动所引发的。
在北大西洋,2 000 m深处的温、盐度关系变化较快,对剖面浮标获取的资料采用延时模式校正十分困难,将自动剖面浮标的观测深度从目前的2 000 m延伸到更大深度上,获取更深的观测资料非常必要[3]。
自动剖面浮标使用的双向通信系统改变其剖面深度、循环时间以及其他参数等,新传感器的使用可增加重要的地球化学和生物学信息,将自动剖面浮标延伸到更大的观测深度、季节性冰区、边缘海和边界流采样,使其覆盖范围和测量范围更广,随着自动剖面浮标资料数量的增加和质量的提高以及应用研究领域的不断扩大和深入,自动剖面浮标所获取的资料在气候监测和气候变化预测、灾害性天气事件的预报、渔业和海洋生态系统的监测和管理以及交通运输和军事等领域的应用成果将会越来越多[3]。
1 自动剖面探测浮标
1.1 自动剖面浮标的发展历程
浮标雏形是利用欧拉法和拉格朗日法探测海表面和深层海流而制作的一种测量仪器。自动剖面浮标是在中性漂流浮标的基础上发展而来的,综合了传感器技术、卫星定位和通信技术。
1955 年,英国国家海洋研究所的John C Swallow提出了中性浮标的概念,与此同时Stommel也提出了直接测量深海海流中性浮标的概念。随着水声技术的成熟,利用中性浮标实现了对深层海流的测量[5-8],如北大西洋东部海盆的深层流,墨西哥湾流,马尾藻海深层涡流等。自从Swallow等在1961年成功测量墨西哥湾流之后,人们对大洋环流的认识很大一部分来自中性浮标。
在20世纪60年代末70年代初,海洋浮标的研制进程因海洋石油开发为主导的海洋资源开发的兴起得到了加速。
Swollow中性浮标由铝质圆柱外壳、电池、声学脉冲发送器、通讯设备等组成,通过船载声学设备接收数据,可以用来测量深层流与几百千米直径的涡流和环流,但浮标布放深度和漂流范围受声学信号的接收范围限制。
Rossby和Webb[9]于1970开发的基于高能量250 Hz声源的SOFAR型浮标(sound fixing and ranging),可实现大范围跟踪,使用寿命长达数年。但SOFAR型浮标体积庞大,重达430 kg,操作不方便。
1986 年,Rossby等[10]对这些问题进行了改进,也就是沿用到现在的RAFOS型浮标[11]。其工作方式的改进大大减小了浮标的体积和重量,并延长了水下作业时间。
1992 年,Russ Davis和Dou g Webb[12]开始着手研制自动剖面浮标(ALACE),该型浮标具有多年使用寿命,可以在无冰海域对次表层流速进行测量,用Argos卫星系统通信和定位,摆脱了声学定位系统的制约,减少了布放成本,提高了布放作业的机动性,使得应用范围更加广泛。ALACE型浮标改变了RAFOS和SOFAR使用的抛载重物上浮,使用油囊式浮力调节系统,通过改变浮标的排水体积来改变浮力大小,实现了重复从水下到水面的自主上浮下潜。法国的MARVOR型浮标[23]也沿用了该方法。随着法尔茅斯科学仪器和海鸟电子联合开发的高稳定性能CTD的使用,将ALACE型浮标改进为PALACE型浮标[13]。
1996 年,D’Asaro等[14]开发的自动剖面浮标成功地对紊流区域三维海水的运动进行了跟踪,结合压力和温度测量垂直水通量和评估垂直热通量。
1.2 常规自动剖面浮标
常规自动剖面浮标的观测深度小于2 000 m[15]。
PALACE型浮标技术的成熟和成功应用加快了科学家们探索海洋的步伐,并首次提出了全球海洋次表层温、盐剖面观测Argo计划[16],同时也促进了自动剖面浮标的研制。美国、法国、加拿大相继开发和生产出自动剖面浮标,支持国际Argo计划的实施,Argo浮标的测量过程,如图1所示。法国IFREMER研究所与加拿大MetOcean公司共同研制了PROVOR型剖面浮标、美国Teledyne Webb公司研制的APEX型剖面浮标、Scripps海洋研究所研制的SOLO型剖面浮标均用到海洋温、盐、深的剖面观测中[17-18]。

图1 Argo浮标的测量过程[19]
与此同时,Argo核心观测区域也扩大到高纬度海区[3]。随着传感器技术的发展,高纬度浮标装备有探冰传感器,可以等到在无冰海区浮出水面时再发送观测资料,或将观测资料储存起来,等夏天冰盖融化后再把资料发回地面,与铱卫星通讯相结合的高纬度浮标其失效率与无冰海区相当。图2为高纬度浮标的测量过程。

图2 装备有探冰传感器的浮标测量过程[20]
截至2016年4月份,大约有18种类型的剖面浮标处于正常运行状态,主要以美国和法国为主[21]。其中早期使用的PALACE型剖面浮标已被淘汰,美国产APEX型剖面浮标最多,占4月份月总数的50%左右,其次为法国产APVOR型剖面浮标,约占12%。在18种浮标中,超过100个以上的有8种,约占总数的96%。其中美国产6种(如APEX,SOLO_Ⅱ,NAVIS_A,S2A,SOLO和SOLO_W),占总数的80%左右;法国产2种(如APVOR和PROVOR),占总数的16%左右。表1所列Argo计划中使用的主要浮标性能。

表1 Argo计划中主要使用到的2 000 m浮标性能指标
截至2016年5月底,全球海洋范围内布放的Argo浮标已有3 918个,如图3所示。

图3 全球布放的Argo浮标[4]
自动剖面浮标资料传输的方式也由原来单一的Argos单向通讯,扩展到可选的Iridium、Argos-2或北斗双向通讯,全球Argo实时海洋观测网提供观测信息和数据传输服务的卫星系统中利用Argos卫星系统的浮标最多,约占总数的53%;其次为Iridium卫星系统,约占46%左右[21]。
自动剖面浮标携带的传感器除了测量温度、电导率和压力等物理海洋环境参数之外,传感器开始向生物地球化学领域拓展,一些加装了如溶解氧[22-23]、叶绿素、生物光学、硝酸盐和pH等生物化学要素传感器的剖面浮标正逐年增多,呈快速发展趋势[20]。
我国剖面浮标的研究工作始于“九五”计划末期,期间解决了剖面浮标的若干关键技术。“十五”期间正式立项研制自动剖面浮标。
2003 年,国产自动剖面探测浮标COPEX(China Ocean Profiling Explorer)成功进行了布放试验[8,10]。
我国自动剖面浮标研制虽然起步较晚,但自行研制的北斗卫星导航定位系统具备为用户确定其地理位置的能力。在中国及其周边区域,北斗用户机系统中用户与用户、用户与中心控制系统间均可实现双向简短数字报文通信,用户终端具有双向数字报文通信能力[24-25],已经成功应用在自动剖面浮标上。
目前,我国投向市场的常规自动剖面浮标主要有国家海洋技术中心研制的COPEX浮标和中船重工710所研制的HM2000浮标,其主要性能如表2所示。

表2 国产2 000 m常规自动剖面浮标主要性能指标
1.3 深海自动剖面浮标
深海的水文观测往往受限于船载水文仪器或者海底锚链观测装备。虽然常规自动剖面浮标为科学研究提供了大量的数据,获得更高的时间和空间分辨率,但海洋系统的复杂性和不确定性,以及海洋要素变化导致的气候变化等。使得获取更深的观测资料非常必要。因此,获得深海更密集的采样需求被科学家们广泛认可,这样不仅可以帮助人们建立更加完整的模型来研究海洋中某些因素之间的相互关联和影响,在某种程度上,还可以通过一套复杂的因素在大范围的空间和时间尺度下对地球物理,化学,生态生物量同时产生影响,利用多学科方法综合分析,有效地评估气候变化和人类活动的影响等。深层海水的变化与输送,对全球气候变化的作用和影响甚至更大。因此,国际Argo计划启动深海(大于2 000 m)Argo观测,发起对深海Argo剖面浮标的研制。深海自动剖面浮标可以满足大尺度测量温度、盐度、深度以及观测大洋环流的需求,结合其它观测系统技术,是对常规浮标大尺度观测的补充[15]。

表3 国外深海自动剖面浮标
目前,国际上的深海自动剖面浮标主要有Scripps Institution of Oceanography开发的 Deep SOLO和Teledyne Webb开发的Deep APEX型浮标[26-27],这两款浮标最大下潜深度可达6000m,DeepAPEX型浮标已经推向市场。由日本海洋科技研究中心和Tsurumi Seiki Co.Ltd.(TSK)公司联合开发的Deep NINJA型浮标、由IFREMER开发并由生产商NKE制造的Deep Arvor型浮标的下潜深度已经到达4 000 m[15]。然而,我国在深海自动剖面浮标上仍然是空白。图4为深海自动剖面浮标。
2 自动剖面浮标的组成
纵观常规型自动剖面浮标,外观基本都是圆柱形耐压壳体设计。主要由水密耐压壳体、机芯、液压驱动装置、传感器、控制/数据采集/存储电路板、数据传输终端(PTT)和电源等部分组成。

图4 深海自动剖面浮标[15]
顶部是半球形上盖,装载剖面测量CTD、通讯定位天线、抽真空密封结构件等。圆柱壳体底部为半球形下盖,下端装一碟形双腔皮囊(如图5所示),一个为气囊,一个为油囊。
浮标内部机芯为一矩形底板,该底板上装有柱塞泵、气泵、液压管路、控制电路板、电池组、电机等。机芯将浮标两端半球形端盖连结成体并使其密封,浮标外观如图6所示。

图5 自动剖面浮标蝶形双腔皮囊

图6 机芯及圆柱形外壳
浮标控制系统主要由CTD测量模块、数据存储模块、定位通讯模块、电源模块、浮力调节模块和舱内传感器组成[28-30,24-25],其控制系统组成如图7所示。

图7 自动剖面浮标控制系统模块图
3 自动剖面浮标浮力调节系统
物体在水中实现沉、浮运动通常有3种途径:(1)改变物体的体积而不改变重量;(2)改变重量而体积不变;(3)增加或减少所施加的外力[1,30]。
3.1 可调压载式浮力调节装置
可调压载式浮力调节装置,即在体积不变的情况下,通过改变自身重量来调节净浮力的大小。此种调节方式的调节能力强、浮力变化范围大,多用于大型潜水设备。一般采用可弃压载物或者可调压载水舱两种方式来实现。
可弃压载调节,调节方式结构简单,实现成本较低,但是不能对浮力重复调节。在水下固体压载物被抛弃后,就无法重新获得压载,因此随着压载物不断的减少,其调节能力也在逐渐的丧失[31]。
可调压载水舱式的浮力调节装置,则是通过改变水舱注水量的大小来调节水舱重量,从而调节净浮力的大小[32]。由于潜水设备处于水中,将水作为压载物就可以实现压载的可重复调节。当需要上浮时,向水舱中充入高压气体将水压出水舱,当需要下潜时,则向水舱中加水。这种调节方式可以实现净浮力的大范围变化,且相比于固体可抛式压载可以实现重复调节。
目前,由于高压海水泵耐腐蚀等一系列问题亟待解决,随着高压海水泵体积小型化的实现,耐腐蚀和可靠性增强等问题的解决,未来可以用此方法设计自动剖面浮标的浮力调节系统。
3.2 可变体积式浮力调节装置
可变体积式浮力调节装置,通过改变自身体积来调节浮力大小,在重量不变的情况下实现净浮力的调节,一般采用可变形油囊、活塞或者气囊来实现[33-34]。此种调节方式的浮力调节范围较小,但更易于实现浮力的精确控制,多用于中小型的水下设备。
可变形油囊调节装置是利用油囊的柔性,对油囊充入或吸出液压油就可以实现油囊体积的改变,从而调节浮力大小。按照泵油方式又可以分为单柱塞式、液压泵式、温差驱动式[1]。
水下滑翔机的浮力调节装置[35-36]与自动剖面浮标的浮力调节原理相同。除了利用油囊或液囊来改变体积的方式以外,中船重工710研究所[37]还提出了利用活塞直接改变体积的浮力调节装置,其活塞一端与海水相通,另一端由推杆驱动,利用活塞的进退实现体积的改变。
此外,利用气囊来改变体积,相比油囊式和活塞式更能够有效减轻系统的重量,减少空间的占用。但由于气体的可压缩性,在水下不同的深度压力环境下的体积压缩量不同,难以实现对于气囊体积的精确控制,目前采用气囊式结构的浮力调节装置尚不多见。
3.3 自动剖面浮标浮力调节系统
Swollow中性浮标通过抛载重物减轻浮标自重获得浮力。ALACE浮标改变了RAFOS和SOFAR浮标使用的抛载重物的方式,通过油囊式浮力调节系统改变浮标的排水体积来实现上浮下潜运动,这种方式不仅降低了成本,而且对环境友好。
常规自动剖面浮标依靠改变其自身体积来调节浮力[38]。其浮力调节装置为单柱塞式供油,通过与电机连接的螺旋副带动柱塞往复运动,实现油囊油液的注入和排出。该装置用于改变浮标体积的关键部件是一台单活塞单冲程柱塞泵和置于浮标体之外的可变形油囊。当柱塞正向运行时,柱塞缸内的液压油被推入油囊,浮标体积就增大。反之,柱塞回程时,油囊内的油被抽回柱塞缸,体积就缩小。
现在超过3 000 m的大深度剖面探测浮标的浮力调节主要通过单冲程泵和液压泵实现。由于深度大,深海剖面探测浮标所承受的压力也会随着水深的增加而增大,APEX[26,39]和SOLO型 6 000 m级的浮标均采用球形设计,承压效果更好,且能减小浮标的重量。该球形剖面探测浮标沉浮功能的实现与2 000 m级剖面浮标的原理相似,但液压系统存在较大差异,如图8~图9所示。由于玻璃球耐压壳体体积所限,超高压小体积的液压泵,配套的直流电机,输出转矩足以克服外压使皮囊涨大,改变体积;而按照常规2 000 m自动剖面浮标设计,要产生大推力将使得自动剖面浮标变得十分笨重。
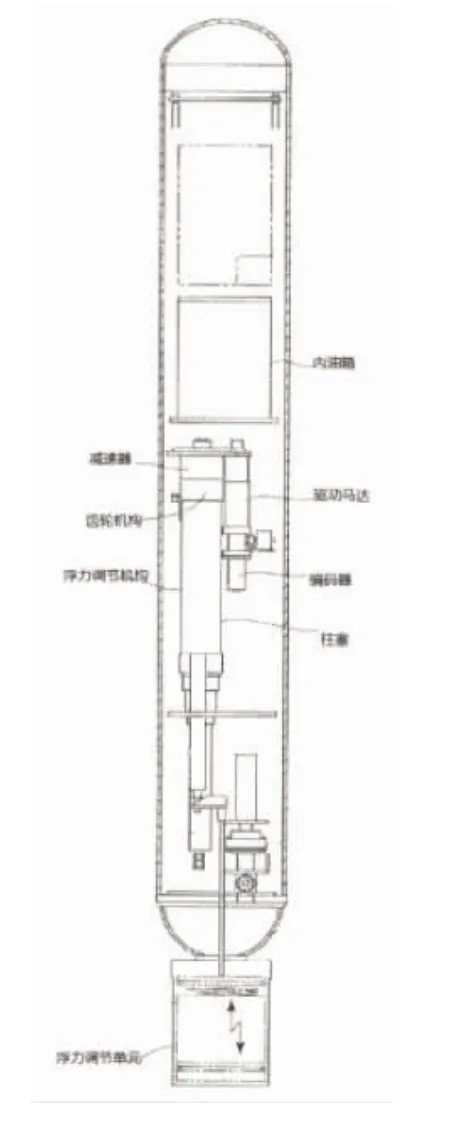
图8 常规自动剖面浮标的液压系统[38]

图9 Deep APEX型自动剖面浮标液压调节系统[26]
4 问题与展望
4.1 遇到的问题及解决方法
(1)电池能量。增大电池能量的一种有效方式就是将碱性电池换成锂电池,增大电池的能量密度。电池的放电容量和放电倍率是功率型锂离子动力电池的重要特性指标,锂离子动力电池的高倍率放电容量随温度的降低而迅速下降,低温下的放电电压明显下降[43]。然而,自动剖面浮标大多时候工作的环境温度都在2℃左右,因此电池组中电池的内部阻抗可能出现突然增大很多的现象。
为了保护电池,延长锂电池的使用寿命,可以适当地改变漂流深度,使得锂电池工作的环境温度稍高。锂电池高能量密度的突破,使得体积更小、重量更轻,有利于改善浮标的整体性能。另一方面,采用低功耗控制器,如低功耗的MSP430单片机;在控制程序设计过程中,优化算法,也可适当减少能量消耗。
(2)核心部件依赖国外。虽然我国常规自动剖面浮标的总体集成取得了一定的成功,然而就浮标的关键部件仍然受制于国外,如现在自动剖面浮标中使用最广泛的SBE-41和SBE-61 CTD传感器,均由美国的海鸟公司提供;而自动浮标中的电机和液压泵等均由国外公司提供,核心部件完全依赖国外进口。我国应加快基础部件的研发投入,提高核心部件的可靠性。
(3)虽然我国已经有自己的北斗卫星定位通讯系统,然而北斗的通讯范围仅限我国及东南亚的部分区域,且短报文通讯1 min只能发送77个字节。目前使用的短报文通讯属于民用通道,通讯速度较慢,采用数据压缩方法,可以减少数据传输时间;或通过军用通道,提高数据传输速率。
(4)自动剖面浮标寿命和稳定性出现衰退,原因尚不清楚,例如在整个Argo计划中浮标的稳定性是非常不均匀的。浮标技术上的改进,将有助于提高浮标的稳定性。从深海自动剖面浮标的布放情况来看,CTD传感器均存在偏差[15],具体偏差原因可以会同CTD传感器厂商联合解决。
4.2 展望
Argo计划中使用的自动剖面浮标主要以欧美国家为主。虽然我国的COPEX和HM2000A浮标满足Argo计划提出的测量要求[44],但国产自动剖面浮标的性能仍是落后于欧美国家。随着我国海洋强国战略的推进,深海自动剖面浮标的研制也必将是一个备受关注的话题,未来自动剖面浮标将在以下几个方面获得突破:
(1)随着当前人类对海洋研究领域的逐步扩展,很多新技术、新材料不断涌现,并使用到自动剖面浮标上,降低成本、提高可靠度、使用新的节能方法来延长工作寿命,使用新能源等是未来海洋新技术应用和发展的趋势。
(2)随着科学研究的需要,海洋剖面观测不再仅仅局限于温度、盐度、深度、溶解氧、叶绿素等传感器,更多新功能的传感器必将大量出现,用来测量特性的生物化学参数,以及检测海洋污染等,使得自动剖面浮标的测量参数更多。
(3)由于海洋环境的复杂多变,除了降低浮标的丢失概率之外,就是研究环境友好型的可降解材料,一旦浮标丢失,一定时间后可自动降解。
(4)减小剖面浮标关键部件体积,从而减小浮标总体体积和重量,不仅方便布放,也可降低成本和能耗。
5 结语
随着Argo计划的提出,目前Argo浮标的种类繁多,性能更加优越。现在Argo浮标中主要还是以欧美国家占绝对优势,我国处于相对落后的状态。虽然我国的COPEX和HM2000A浮标满足Argo计划提出的测量要求,但国产浮标的性能和使用寿命等还是不及欧美国家的浮标产品。国外的深海自动剖面浮标已有部分投向市场,而国内的深海自动剖面浮标仍然处于空白,因此,发展我国的深海自动剖面浮标迫在眉睫。
[1]许建平.阿尔戈全球海洋观测大探秘[M].北京:海洋出版社,2002:1-6.
[2]许建平,刘增宏,孙朝辉,等.全球Argo实时海洋观测网全面建成[J].海洋技术,2008,27(1):68-70.
[3]刘仁清,许建平.Argo:成功的十年[J].中国基础科学,2009(4):15-21.
[4]http://www.argo.ucsd.edu/About_Argo.html
[5]SwallowJ C.Aneutral-buoyfloat for measuringdeep current[J].Deep Sea Research,1953,3(1):74-81.
[6]SwallowJ C.Some further deep current measurements usingneutrallybuoyant floats[J].Deep-Sea Research,1957,4:93-104.
[7]SwallowJ C.The Aries current measurements in the Western North Atlantic[J].Philosophical Transactions ofthe Royal Society London AMathematical Physical and EngineeringSciences,1971,270(1206):451-460.
[8]SwallowJ C,Worthington LV.Measurements ofdeep currents in the western North Atlantic[J].Nature,1957,179:1183-1184.
[9]Rossby T,Webb D.Observing abyssal motion by tracking Swallow floats in the SOFAR channel[J].Deep-Sea Research,1970,17: 359-365.
[10]RossbyT,Dorson D,Fontaine J.The RAFOSsystem[J].Journal ofAtmospheric and Oceanic Technology,1986,3(4):672-679.
[11]http://www.webbresearch.com/rafos.aspx
[12]Davis R E,Webb D C,Regier L A,et al.The autonomous Lagrangian circulation explorer(ALACE)[J].Journal of Atmospheric and Oceanic Technology,1992,9:264-285.
[13]Davis R E,Sherman J T,Dufour J.Profiling ALACEs and other advances in autonomous subsurface floats[J].Journal ofAtmospheric and Oceanic Technology,2001,18(6):982-993.
[14]D’Asaro,Eric A,Farmer,David M,et al.A Lagrangian float[J].Journal of Atmospheric and Oceanic Technology,1996,13(6): 1230-1246.
[15]Nathalie Zilberman,Guillaume Maze.Report on the Deep ArgoImplementation Workshop[C]//Deep ArgoImplementation Workshop. Hobart,May5-7th,2015.
[16]http://www.argo.ucsd.edu/About_Argo.html
[17]W John Gould.From Swallow floats to Argo—the development of neutrally buoyant floats[J].Deep-Sea Research II,2005,52: 529-543.
[18]孙朝辉,刘增宏,朱伯康,等.全球海洋中Argo剖面浮标运行状况分析[J].海洋技术,2006,25(3):127-134.
[19]http://www.argo.ucsd.edu/How_Argo_floats.html
[20]http://www.argo.org.cn/index.php?c=index&catid=17&contentid=453&f=show&m=content
[21]卢少磊.北斗剖面浮标在全球Argo实时海洋观测网中的地位岌岌可危[N].Argo简讯,2016,42,(2):16-18.
[22]Emerson S,Stump C,Johnson B,et al.In-situ determination of oxygen and nitrogen dynamics in the upper ocean[J].Deep-Sea Research I,2002,49(5):941-952.
[23]Bishop J K,Davis R E,Sherman J T.Robotic observations of dust-storm enhancement of carbon biomass in the north Pacific[J]. Science,2002,298(5594):817-821.
[24]张少永,商红梅,李文彬.北斗定位通信系统在自持式剖面循环探测漂流浮标的应用初探[J].海洋技术,2009,28(4):126-129.
[25]吴维,齐久成,张静,等.基于北斗系统的ARGO浮标设计[J].气象科技,2013,41(3):459-463.
[26]Teledyne Webb Research.Variable BouyancyProfilingFloat:US,8,875,645 B1[P].2014.
[27]Petzrick E,Truman J,Fargher H.ProfilingFrom6,000 Meters With the APEX-Deep Float[J].Sea Technology,2014,55(2):27.
[28]余立中,张少永,商红梅.我国Argo浮标的设计与研究[J].海洋技术,2005,24(2):121-129.
[29]余立中.我国的海洋剖面探测浮标-COPEX[J].海洋技术,2003,22(3):47-55.
[30]余立中,商红梅,张少永.Argo浮标技术研究初探[J].海洋技术,2001,20(3):34-40.
[31]延安庆,方学红,杨邦清.浅谈潜水器浮力调节系统的研究现状[J].水雷战与舰船防护,2009,17(2):55-59.
[32]刘银水,吴德发,李东林,等.大深度潜水器海水液压浮力调节技术研究进展[J].液压与气动,2014,(10):1-10.
[33]Song F,Smith S M.Design of sliding mode fuzzy controllers for an autonomous underwater vehicle without system model[C]//USA: Oceans 2000MTS/IEEE Conference and Exhibition,2002,835-840.
[34]Aoki T,Tsukioka S,Yoshida H,et al.Advanced technologies for cruisingAUV“URASHIMA”[J].Internetional Journal ofOffshore and Polar Engineering,2008,18(2):81-90.
[35]赵伟,杨灿军,陈鹰.水下滑翔机浮力调节系统设计及动态性能研究[J].浙江大学学报:工学版,2009,43(10):1772-1776.
[36]Webb D C,Simonetti P J,Jones C P.SLOCUM:An underwater glider propelled by environmental energy[J].Oceanic Engineering, 2002,26(4):447-452.
[37]谷军.活塞调节升降式信息战水下平台技术及应用[J].舰船电子工程,2008,28(12):25-27.
[38]Wantanabe et al.FLOATDEVICE:US,8:601,969 B2[P].Dec.10,2013.
[39]Yoshida et al.Profilingfloat and usage ofthe profilingprofilingfloat:US:2008/0087209 A1[P].Apr.17,2008.
[40]Alok Agrawal,Bhuneshwar Prasad,Vinothkumar Viswanathan,et al.Dynamic Modeling of Variable Ballast Tank For Spherical Underwater Robot[C]//Cape Town:Industrial Technology(ICIT),IEEE International Conference,2013,58-63.
[41]BambangSumantri,MNKarsiti,H Agustiawan,Malaysia.Development ofvariable ballast mechanismfor depth positioningofspherical URV[C]//Kuala Lumpur,Malaysia:International Symposiumon Information Technology,2008,4:1-6.
[42]董涛,杨庆保.自持式剖面循环探测漂流浮标水下运动过程实例分析[J].海洋技术,2006,25(1):20-23.
[43]王元奎,魏平芬.功率型锂离子动力电池的高低温容量特性[J].电源技术,2015,39(10):2079-2081.
[44]卢少磊,孙朝辉,刘增宏,等.COPEX和HM2000与APEX型剖面浮标比测试验及资料质量评价[J].海洋技术学报,2016,35 (1):84-92.
Research Status and Prospects of Automatic Profiling Floats
CHEN Lu,PAN Bin-bin,CAO Zheng-liang,CUI Wei-cheng
1.Hadal Science and Technology Research Center,College of Marine Science,Shanghai Ocean University,Shanghai 201306,China; 2.Shanghai Engineering Research Center of Hadal Science and Technology,Shanghai 201306,China
This paper reviews the development process of automatic profiling floats,which has evolved from neutral floats proposed by Swollow to currently used PROVOR,APEX and SOLO type automatic profiling floats. Then this paper introduces several major automatic profiling floats of the Argo Plan.Their buoyancy regulation principles is mainly based on changing the displacement volumes of the floats to control the motion,so as to measure the water temperature,salinity,depth and other data.Compared with the design of deep-sea automatic profiling float(>2000 m)and conventional float(<2000 m),most of the pressure-proof structures of deep-sea automatic profiling floats have been designed in a spherical shape,the float thus has small deformation and lighter weight under enormous pressure;The single stroke plunger pump is replaced by a smaller hydraulic pump, in order to provide ultrahigh pressure and make full use of the sphere space.At present,the conventional automatic profiling floats have been widely used in the investigation and collection of marine environmental data, while the deep-sea automatic profiling floats are still in the development and testing stage.The floats still face many technical challenges,and more strict requirements have been put forward for the reliability of the automatic profiling floats.
automatic profiling floats;development process;buoyancy regulation;technoligical challenge; development direction
P715.2
A
1003-2029(2017)02-0001-09
10.3969/j.issn.1003-2029.2017.02.001
2016-06-27
上海市科委科技创新行动计划资助项目(14DZ1205500,15DZ1207000);上海深渊科学工程技术研究中心筹建项目(14DZ2250900);上海深渊科学工程技术研究中心(筹)开放基金资助项目——大深度剖面浮标浮力调节系统研究;国家自然科学基金资助项目(41374147)。
陈鹿(1987-),男,博士研究生,主要研究方向为水下工程装备可靠性及多学科优化设计。
崔维成(1963-),男,教授,博士生导师,主要从事船舶极限承载能力计算新方法研究、船舶疲劳寿命预报的统一方法研究、大型海洋浮体的流固耦合分析及多学科优化设计。E-mail:wccui@shou.edu.cn
猜你喜欢
家教世界·创新阅读(2023年3期)2023-06-09 00:19:23
家教世界·创新阅读(2023年2期)2023-06-07 23:53:42
家教世界(2023年7期)2023-03-22 12:11:24
家教世界(2023年4期)2023-03-04 07:31:28
中学生数理化·八年级物理人教版(2022年5期)2022-06-05 06:57:44
中学生数理化·八年级物理人教版(2022年5期)2022-06-05 06:57:40
中学生数理化·八年级物理人教版(2022年5期)2022-06-05 06:57:36
——工程地质勘察中,一种做交叉剖面的新方法
中国设备工程(2021年2期)2021-01-28 07:51:10
电子测试(2017年12期)2017-12-18 06:35:46
北京航空航天大学学报(2016年6期)2016-11-16 01:50:44