基于变电站状态评价的集配型巡检机器人应用研究
2017-05-12 05:33江贤康王少博
河北电力技术 2017年2期
江贤康,王少博,薛 松,高 上,韩 双
(国网河北省电力公司石家庄供电分公司,石家庄 05000)
基于变电站状态评价的集配型巡检机器人应用研究
江贤康,王少博,薛 松,高 上,韩 双
(国网河北省电力公司石家庄供电分公司,石家庄 05000)
为解决多座变电站共用1台机器人的问题,提出基于变电站状态评价动态设置集配型机器人巡检模式。介绍变电站智能机器人巡检系统的结构、机器人的性能需求,分析变电站状态评价标准、变电站状态巡检、机器人巡检模式。通过实际应用对比证明:基于所研究的方法进行应用不仅保证机器人能完成变电站设备巡检任务,还能减轻变电站运维人员的劳动强度、提高工作效率、提升设备检测水平等。
变电站巡检机器人;集中配置;状态评价;动态设置;巡检模式
随着国家电网“三集五大”的推进,变电站都已实现无人值守,变电站的值班模式也由传统有人值班转换为无人值班模式,依据“大检修”的要求对变电站的实行运维一体化管理模式,即变电站运维人员需承担巡视、操作以及相当部分设备的检修工作,新生产模式与过去发生了较大的变化。
传统的变电站巡检工作是依靠运行人员每天按制订的变电站巡检计划要求到所辖变电站进行巡检,并记录相关设备运行数据,这种巡检方式给运维人员带来了相当大的困难。目前运维人员管辖变电站较多,对应的一次设备数量巨大,每天都要进行重复性的巡检任务,不仅容易产生厌烦心理无法保证巡视质量,而且造成其他工作被迫延迟或取消,这对变电站巡检工作带来很大的挑战,也对电网的安全稳定运行造成重大的安全隐患[1 4]。
为了解决这种矛盾,根据电力的实际情况,结合传统的巡检方式同时兼顾变电站实际的工作和智能机器人技术应用的发展,由智能巡检机器人替代变电站运维人员进行设备巡检将成为必然趋势。目前巡检机器人在500 k V及以上变电站已经广泛应用,都是一座变电站配置1台机器人或者2台机器人,而地区电网的变电运维班组所管辖变电站较多,无法保证每个变电站均配置1台巡检机器人。通过对变电站巡检要求及巡检机器人的特性进行了相应的研究,提出基于变电站状态评价动态设置集配型机器人巡检模式,实现多站共用机器人,不仅能保证完成变电站设备巡检任务,还能提高巡检工作的安全性和可靠性,实现变电站设备和电力系统安全稳定运行。
1 变电站智能机器人巡检系统
整个变电站智能机器人巡检系统包含六大部分:智能巡检机器人(包括手持遥控器)、机器人充电房、微气象信息采集、网络通信系统、机器人远程集控和本地监控后台。机器人系统的架构见图1。

图1 系统架构示意
1.1 智能巡检机器人的功能
为满足变电站设备巡检要求,智能巡检机器人具备以下主要功能[5]:
a.红外测温。红外测温是利用巡检机器人的红外测温功能,在预设的测温点对有关设备进行测温,并对测温数值按照设定的判断条件进行自动计算,判断条件包括设备绝对温度、温差。
b.仪表读取。巡检机器人在对表计进行读取时,除了保存表计图像外,还能自动将各个表计的实际值转换为数字量。转换值与实际值比较,误差在±5%以内。同时转换值与设定的报警值进行对比,超出的列为不合格数据。另外表计值具备曲线查询功能,以反映参数变化趋势。
c.设备状态识别。巡检机器人可利用图形识别比对技术,对断路器、隔离开关等设备的分合状态进行判断,自动识别设备处于断开或运行状态。
d.数据分析。巡检机器人获取的数据与设定的报警限值进行对比,超出限值的为不合格数据并在管理后台的“报警信息”栏中显示,同时发出报警声响,在巡检报告“异常告警数据”中列出。
1.2 智能巡检机器人的性能
各个变电站的巡视环境有所不同,巡检机器人的性能要满足现场条件。机器人主要由驱动部分、承载底盘、充电部分和外壳等几部分组成,行走速度为0~1 m/s,结构为防护等级55的高强度全金属材质,能连续巡检时间可达到10 h,有低电压报警功能,并在电压达到返回充电等级时,自动返回充电房进行充电。机器人的驱动部分为轮式结构,前面的两轮为驱动轮,后面的两轮为万向随动轮,该结构能实现机器人以两驱动轮中心点为原点做原地转弯运动,爬坡能力不小于15°,涉水深度为110 mm,越障能力为60 mm,紧急停车距离小于0.15 m。机器人配有1 080 P、30倍变焦可见光相机、红外热成像仪,云台水平360°连续旋转,俯仰(-90°)~(+90)°,这些硬件设备能够保证机器人满足变电站巡检的要求。
2 变电站状态评价
2.1 设备缺陷定性
设备缺陷按照对电网运行的影响程度,分为危急、严重和一般三类。
危急缺陷是指设备或辅助设施发生了直接威胁安全运行并需立即处理的缺陷,否则,随时可能造成设备损坏、人身伤亡、大面积停电、火灾等事故。
严重缺陷是指对人身或设备有重要威胁,暂时尚能坚持运行,不及时处理有可能造成事故理的缺陷。
一般缺陷是指除了危急、严重缺陷以外的设备缺陷,指设备缺陷性质一般,情况较轻,对安全运行影响不大、尚能坚持运行的缺陷。
2.2 变电站状态评价标准
变电站状态评价值以设备缺陷发生评测值及设备红外测温情况进行评分,基准分为100分。设备缺陷评分标准如表1所示。
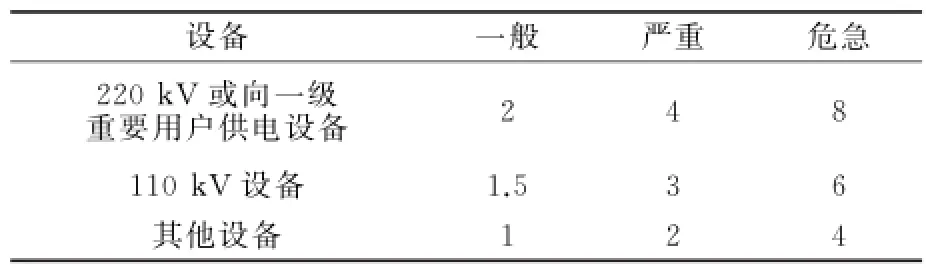
表1 设备缺陷评分标准
设备测温按照测温特征值进行对比并结合现场实际经验,温度特征值包括设备相间温差、测温点温度,其温度规定值如表2所示[6]。

表2 温度特征值
a.良好状态。同时满足以下条件,评定为良好状态:变电站状态评测值在80分及以上;变电站内设备、生产设施不存在影响设备安全运行的隐患;变电站周边环境良好,无影响设备安全运行的因素。
b.不属于良好状态的变电站,评定为一般状态。
c.关注状态。满足以下条件之一时,即转为关注状态:变电站当月发生缺陷总扣分值达到10分及以上;3天内主变负荷经常出现超过80%及以上的情况;变电站内设备、生产设施存在影响设备安全运行的隐患;变电站周边环境不满足要求;其他需要特殊巡视的情况。
2.2 变电站状态巡检
变电站状态巡检以设备状态评价结果为基础,辅以变电站内设备(生产设施)现存隐患影响安全运行程度、变电站周边环境对设备的影响程度等进行综合分析与评价,将变电站评定为“良好”、“一般”和“关注”3种状态,制定不同的例行巡检方案,巡视周期如表3所示。
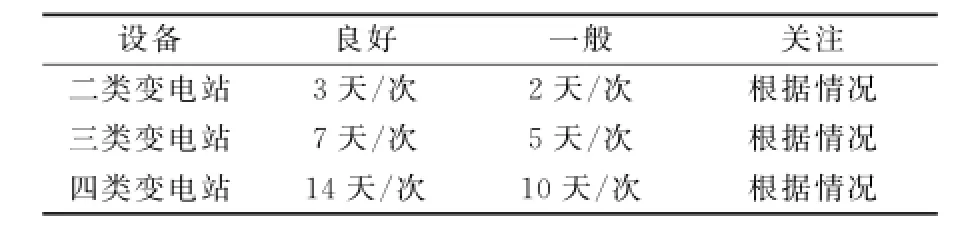
表3 变电站巡检周期
3 机器人巡检模式
为保证机器人完成变电站巡检工作,首先依据变电站的分类及变电站状态评价的原则对变电站巡检周期进行设置。机器人按照制订的计划进行巡视,并开展变电站状态动态评价,发现影响变电站安全运行的因素,确认变电站的状态时,修订例行巡视周期。
按照变电站状态评价的方法对石家庄地区韩化运维班所辖无人值守变电站的状态巡视周期进行设置,如表4所示。
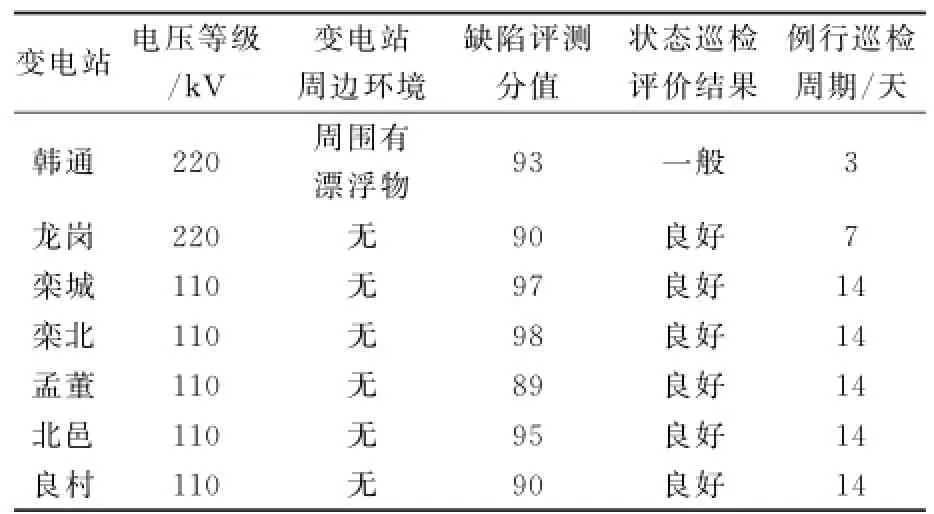
表4 韩化运维班无人值守变电站状态巡检周期表
遇有特殊情况时,变电站立即转入关注状态,利用机器人做到实时动态巡视,确保巡视的可控、在控、能控。
4 集配型巡检机器人的应用
4.1 应用情况
目前韩化运维班负责13座变电站的运维工作,配置有2台集配型智能巡检机器人,2座220 k V变电站共用1台机器人,5座110 k V变电站共用1台机器人,依据变电站状态评价结果制定巡视计划,220 k V变电站每次巡检需6 h,110 k V变电站每次巡检需4 h,恶劣天气、保电等特殊时期,根据要求对重要设备进行特巡。
2016年8月1日至8月31日期间,运维人员依据变电站状态评价的结果制订的巡视任务,应用巡检机器人执行日常巡检任务24次、特殊巡检任务4次、累计运行时间140多小时、收集红外图谱26 670张、设备状态照片1 402张、读取仪表数据7 665项。在一个月的周期内,机器人共发现设备红外缺陷3项。
以220 k V韩通站巡视点设置为例,韩通站共有表计111块,机器人已实现95块表计的自动巡检和数值读取,并能将巡检数据进行分析形成曲线和报表,具备自动报警等功能。经与人工巡视数据比较,机器人表计读取误差在5%之内,满足巡检工作要求。韩通站红外测温检测点设置了541处,覆盖了所有一次设备,与人工相比具有定位准确、检测精度高、标准统一、图谱自动保存等优点。红外测温数据对比实例如表5所示。

表5 红外测温数据
4.2 应用效果
4.2.1 经济效益
应用集配型智能机器人巡检系统可减少以下工作量:每座变电站每月一次的红外测温工作,减少2小时;设备现场巡视记录数据工作,每周减少10小时;当危及人身且安全风险较大时,机器人可代替人工对特殊设备进行检测,减少2小时/月。
巡检机器人应用以来先后多次检测到设备缺陷并及时报警,避免了重大事故的发生。如果按照每年发现一次严重发热缺陷,预防一次设备损坏故障计算,直接节约资金约400余万元。
4.2.2 安全效益
变电站智能机器人巡检系统采用模式识别技术、数据分析等技术,完成变电站内设备温度测量、设备外观异物识别,实现全站设备监控。机器人投运以来,已发现9起缺陷,避免了事故的发生,为安全供电提供了有力保障。
5 结束语
通过对集配型智能巡检机器人应用的研究,实现了基于变电站状态评价方法动态设置巡检机器人巡检周期,能有效保证变电站的巡视范围、巡视标准和巡视质量。对比通过运维班利用机器人巡检与人工巡检效果,机器人巡检具备检测效率高、智能性强、结果客观、无人身安全风险等优点,有效地提升了变电站巡检效率和效益,减轻了班组员工的工作负担。
[1] 鲁守银,钱庆林,张 斌,等.变电站设备巡检机器人的研制[J].电力系统自动化,2006,30(13):94-98.
[2] 赵家庆.220 k V无人值班变电站远方监控系统建设[J].电力系统自动化,2003,27(8):78-80.
[3] 孙国凯,韩 刚.变电站巡检方式对比及智能巡检机器人[J].农村电气化,2008,04(24):30-33.
[4] 鲁守银,苏建军.机器人在变电站设备巡检中的应用[J].机器人技术与应用,2007,(05):33-36.
[5] 周立辉,张永生,孙 勇,等.智能变电站巡检机器人研制及应用[J].电力系统自动化,2011,35(19):85-88.
[6] DLT 664-2008,带电设备红外诊断应用规范[J].
本文责任编辑:杨秀敏
Application Research of Centralized Patrol Robot Based on Substation State Evaluation
Jiang Xiankang,Wang Shaobo,Xue Song,Gao Shang,Han Shuang
(State Grid Hebei Electric Power Company Shijiazhuang Electric Power Supply Branch,Shijiazhuang 050051,China)
At present,the number of substations in the regional power grid is more,and the substation is equipped with centralized intelligent patrol robot.This paper introduces the structure of intelligent robot inspection system and the performance requirements of robot,analyzes the substation state evaluation standard,substation state patrol,robot patrol mode.Through the practical application proved:method research based on not only to ensure that the robot can complete substation patrol tasks, but also can reduce the maintenance personnel's labor intensity,improve work efficiency,lifting equipment detection level.
substation patrol robot;centralize equip;state evaluation;dynamic set;patrol mode
TM764.2
B
10019898(2017)02001603
20161117
江贤康(1987-),男,工程师,主要从事变电站运维工作。
猜你喜欢
环球时报(2022-05-23)2022-05-23
金桥(2021年4期)2021-05-21
哈尔滨轴承(2020年3期)2021-01-26
石油化工建设(2019年4期)2019-10-10
电子制作(2019年7期)2019-04-25
电子制作(2019年7期)2019-04-25
中国实验诊断学(2017年8期)2017-09-03
电子制作(2017年8期)2017-06-05
电子制作(2016年21期)2016-05-17
自动化与仪表(2014年10期)2014-02-26