基于末端防空的威胁评估
2017-05-11 01:34史秉政王旭烽
指挥控制与仿真 2017年2期
史秉政,王旭烽
(1.上海机电工程研究所,上海 201109;2.上海航天技术研究院,上海 201109)
基于末端防空的威胁评估
史秉政1,王旭烽2
(1.上海机电工程研究所,上海 201109;2.上海航天技术研究院,上海 201109)
针对防空作战中末端防空的特殊需求,结合所需保卫的各防御要地,提出了一种目标威胁评估方法,有针对性地选取威胁评估因素,对各防御要地先分别进行威胁评估,再进行总体综合评估,得出综合威胁值,并通过仿真算例验证了该算法的有效性与可行性。
威胁评估;末端防空;隶属函数
在防空作战指挥控制自动化设计中,对来袭目标进行威胁评估是重要环节。目标威胁评估,是指依据上级作战决心、作战预案、被掩护对象性质和信息场传感器送来的空袭目标信息,评估空袭目标价值或威胁大小的过程[1]。威胁程度是指空中目标对防空阵地和被保卫要地可能造成的危害程度,它是目标分配的重要约束条件。目标威胁评估在整个指挥自动化控制决策过程中的位置如图1所示。
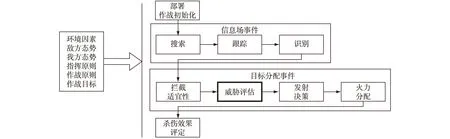
图1 指挥控制主要事件流程图
对目标威胁程度进行评估,首先要进行威胁因素的确定,影响目标威胁程度的因素有很多[2],如果全部纳入考虑,会加大运算压力,而且也是不必要的,一般对起主要作用的威胁因素进行计算,即可对目标的威胁程度进行基本确定。同时,不同的防御作战类型所侧重的威胁因素也不尽相同,因此应根据具体作战定位进行有针对性的选择。
1 末端防空作战特点分析
末端防空作战,处于防空作战的最后一层防御环节,其作战需求具有一定的特殊性,具体表现为以下几点:
1) 决策时间短,要求事先作战预案准备充分,最好实现自动化,因为留给操作手人工决策反应的时间往往不会很长;
2) 反应时间短,要求在敌方做出进一步动作——如投弹、发射等之前,首先将其击落;
3) 敌方意图明显,敌方的攻击目标指向性已较为明确,可能已开始做攻击动作前的准备;
4) 拦截成功率要求高,因为处于最后一道防线,有些情况下并不具备多次拦截的时间与机会,要求最好能一次拦截成功。
鉴于以上末端防空作战的特殊性,可有针对性地进行威胁因素的选取,使威胁评估的结果更符合末端防空的要求。
2 末端防空威胁因素
对于末端防空进行拦截决策,其依据主要是空中目标对末端防空保卫要地的威胁程度,根据末端防空作战的特点,以及目标能力、目标意图和目标机会等方面的考虑,同时权衡目标解算的运算量不宜太大,可选定影响目标威胁度的主要因素包括:目标到达时间、目标航路捷径、目标类型、飞行高度。
到达时间:目标距离、目标速度是表征目标威胁程度的重要因素,而这两个因素又可以合为到达时间。目标与我保卫目标或防空阵地的距离越近、速度越大,则目标到达我保卫目标或防空阵地的时间越短,相应的目标威胁程度就越大。当目标背离或偏离我飞行时,飞抵时间又表现为离远时间,离远时间越长,其威胁度就越小。到达时间可同时反映临近飞行和离远飞行两种不同的情形。
航路捷径:航路捷径是末端防空保卫要地中心(或阵地各作战装备部署位置)到目标航路水平投影的垂直距离。当目标航向直指保卫要地中心(或阵地各作战装备部署位置)时,其对我直接攻击的可能性就越大,攻击成功的可能性就越高,其威胁程度就大;航路捷径越大,敌机攻击企图就越不明显,威胁度就越小。因此,选取目标航路捷径作为一个威胁评估因素。
目标类型:目标的类型决定了其可以执行何种作战任务。例如,空地导弹属于高危目标,表明我保卫中心或防御阵地当前面临攻击,需要立即拦截;武装直升机相对威胁程度较小。依据末端防空需要处理的目标种类,可按照空地导弹、制导炸弹、巡航导弹、反辐射导弹、固定翼飞机、武装直升机区分威胁程度。目标类型作为定性指标,在参与威胁度计算前需要进行定量化处理。
飞行高度:目标降低飞行高度能使其被发现的概率明显减少,同时也是隐蔽接敌的常见攻击战术手段。在目标距要地较远时,目标的飞行高度对我威胁度影响不明显,只有近距离突然出现的低空目标,对我导弹阵地和要地的威胁较大,其威胁度明显提高。
上述四个威胁因素都作为空中目标的属性,从不同侧面反映了空中目标的威胁度。四个因素构成威胁判断的属性集,可以较全面地描述空中目标的威胁度。
3 威胁排序计算方法
威胁程度的计算由隶属函数进行量化处理,其计算方法如下。
3.1 到达时间
1)目标相对保卫点的目标到达时间隶属度函数
相对于防御中的某一点,目标到达时间威胁隶属函数应满足临近飞行时间越小,威胁度越大;临近飞抵时间越大,威胁度越小的要求。反之离远飞行时,时间越小,威胁越小,时间越大,威胁越大。到达时间威胁隶属函数选取正态分布函数;但离远与临近飞行时隶属函数中参数选取不同,故到达时间威胁隶属度函数可表示为:
(1)
式中,k1=1.0×10-5,k2=3×10-4,t为目标到达保卫要地中心(或阵地各作战装备部署位置)的时间。其计算由下式给出:
(2)
式中,d为目标到保卫要地中心的水平距离,V水平为目标的水平飞行速度,规定目标临近飞行时V水平>0、目标离远飞行时V水平<0。隶属函数形状如图2所示。
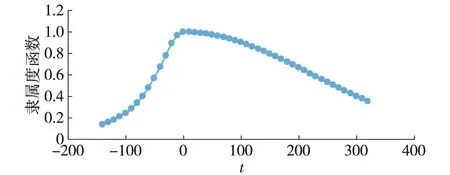
图2 到达时间隶属函数曲线
2)目标相对保卫区域的到达时间隶属度函数
对于防御阵地中的保卫要地区域,目标的到达时间是指目标到达要地区域某边界处的时间,若要地为面状要地,其威胁隶属度函数如下:
(3)
式中,Fin为目标是否在要地区域内的标识;k1、k2取值同上,t为目标到达要地边界的时间。计算如下:
(4)
式中,d为目标到要地边界点的水平距离,V水平同上。
要地形状不同,目标到要地边界点的水平距离计算方式不同。
•若要地为圆面状要地:
(5)
式中,r0为要地圆的半径,r1为目标到要地中心点的距离,r2为要地中心点到目标航线的距离。要地位置如图3所示。
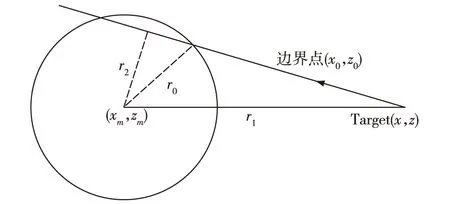
图3 目标到达圆状要地位置示意
•若要地为多边形面状要地:
(6)
如图4所示:
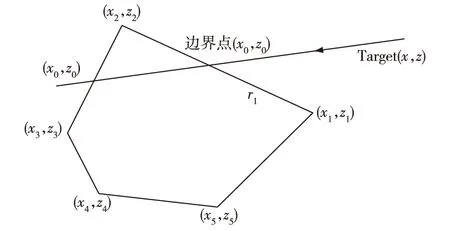
图4 目标到达多边形状要地位置示意
确定目标航线是否与多边形面状要地有交点,其核心是如何确定(x0,z0)的问题。其方法如下:
① 判断目标航线与区域中的哪条边界有交点
假设(x1,z1)、(x2,z2)为要地多边形的两个顶点坐标,f(x,z)为目标航迹函数,则目标航迹与要地多边形是否有交点的判断方法如下:
如果f(x1,z1)≠0,f(x2,z2)≠0;
如果f(x1,z1)·f(x2,z2)<0,则目标航迹与要地多边形边是有交点;
如果f(x1,z1)·f(x2,z2)>0,则目标航迹与要地多边形边是没有交点
如果f(x1,z1)=0,则(x1,z1)为交点;
如果f(x2,z2)=0,则(x2,z2)为交点;
如果f(x1,z1)=f(x2,z2)=0,则重合。
② 若存在交点,则计算交点坐标;再选择离目标最近的交点距离作为目标到要地区域的距离d。
③ 若目标航线与多边形面状要地无交点,则(x0,z0)取要地中心点,据此计算d。
3.2 航路捷径
1)目标相对保卫点的航路捷径威胁隶属函数
航路捷径威胁隶属函数应满足航路捷径越小,威胁度越大;当航路捷径逐渐增大时,威胁度逐渐减少;当航路捷径为零时,威胁度最大,因此,航路捷径威胁隶属函数符合中间型正态分布函数形式。其威胁隶属度函数为:
μp(p)=e-kp2
(7)
式中,k=9×10-3,p为目标相对保卫点的航路捷径(单位取km)。隶属度函数曲线如图5所示。
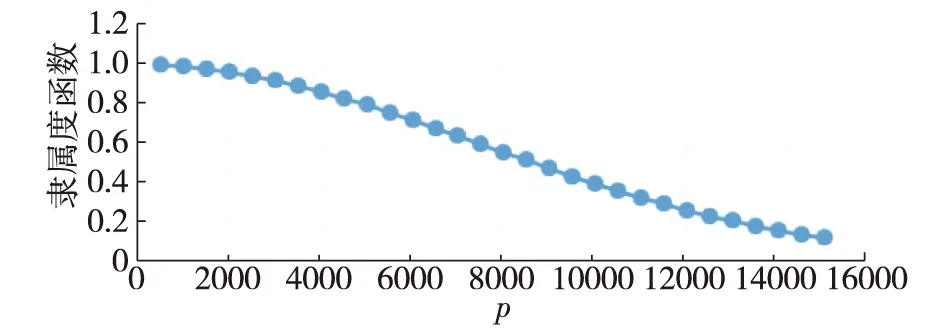
图5 航路捷径隶属函数曲线
2)目标相对保卫区域的航路捷径威胁隶属函数
目标相对保卫区域的航路捷径威胁隶属度的建立要考虑目标航线是否穿越被保卫区域,若目标航向不穿越被保卫区域,则目标航向威胁度较小。当目标航向穿越被保卫区域时,航路捷径越小威胁越大。
可将穿越标志记作Fcy,Fcy=1表示穿越,Fcy=0表示不穿越。
Fcy确定方法:对于圆形要地:若目标与要地中心的距离小于要地半径,则Fcy=1;对于多边形型要地,若存在一条边,其端点为(x1,z1)、(x2,z2),使得f(x1,z1)·f(x2,z2)<0,则Fcy=1。f(x,z)为目标航迹函数。

(8)
Fcy=0时,航路捷径隶属度函数定义如下:
(9)

若要地为多边形,则dmax、dmin为要地中心点到要地各顶点距离的最大值、最小值;若要地为圆形,则dmax、dmin分别取要地半径与0。
3.3 目标类型
目标类型属于定性的威胁因素,而定性因素参与运算需要经过定量化处理,可采用专家打分的方法,对目标类型威胁程度进行量化。
根据目标类型威胁程度,进行归一化的专家打分,目标类型威胁隶属函数如下:
(10)
若目标是由系统指定的重点目标或干扰目标时,目标类型威胁隶属函数的调整方法如下:
重点目标:可将目标类型隶属函数分量定为1,即以μl(l)=1进入后续的威胁程度判断计算;
干扰目标:可将目标类型隶属度函数在其原威胁度基础上进行增加,μl(l)=μl(l)+0.1;若μl(l)>1,则令μl(l)=1。
3.4 目标高度
从空中目标的作战方式看,目标的高度越低(尤其是近距离目标),其威胁程度越大。当目标高度小于某一阈值时,其威胁值最大;当目标高度大于该阈值时,随高度值递减,其威胁值递减。因此,飞行高度威胁隶属度函数可取偏小型的降半正态分布函数(阈值高度定为500m),其形式为:
(11)
式中,k=8×10-9,α=500m。隶属度函数曲线如图6所示。
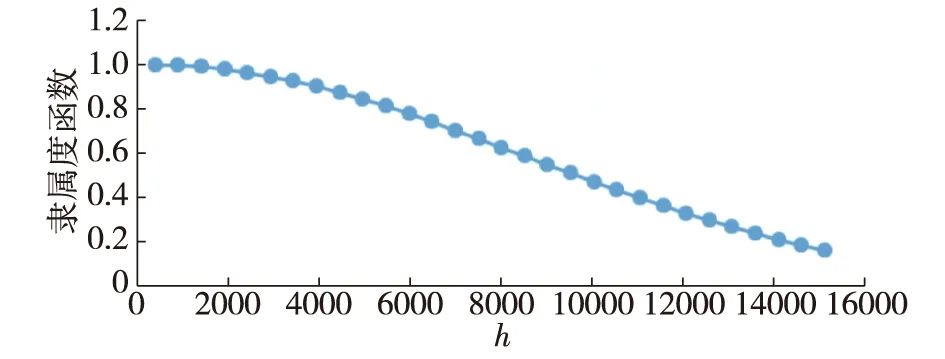
图6 目标高度隶属函数曲线
3.5 威胁度值的计算
在计算出上述各威胁因素后,威胁值的计算还需要明确上述各威胁因素的权值,各因素的权值反映了其相对重要程度,是属性的偏好信息,对决策结果有较大的影响。属性的权值也是分析决策问题的基本信息,由各权值组成的权向量为:
(12)
各威胁度的权值可由保卫目标指挥所或防空部队指挥中心指定,也可依据末端防空作战的特点,按照各属性因素对威胁程度的影响大小,根据专家打分的统计结果给出各因素的权重系数。这里根据专家打分的结果确定各权值:w1=0.55,w2=0.15,w3=0.2,w4=0.1。
在建立了上述威胁因素隶属度函数和各因素的权重后,可利用下式计算目标i相对于保卫点/保卫区域s的威胁值:
μi,s=w1×μt(ti,s)+w2×μp(pi,s)+w3×μl(l)+w4×μh(h)
(13)
3.6 目标威胁度的综合计算
以上只是目标针对单个保卫点/保卫区域的威胁值计算方法,但在末端防空作战中,阵地中需要保卫的要地可能不止一个,各要地的重要程度也不尽相同,因此需要进一步计算目标对整个阵地各保卫要地的综合威胁值。
使用Iimp(yd)表示阵地中要地的重要程度。在评估时,将防卫区域的所有要地(民用和军用)综合考虑,可暂设定为指挥所、机场、高价值兵器、发射阵地、桥梁、港口六种要地。且军用要地的重要度一般不低于民用要地的重要度。根据专家打分确定Iimp(yd)取值如下:
将目标对阵地中所有要地的威胁值进行计算,并取最大值,做为该目标在整个末端防空作战中的最终威胁值。目标最终威胁值μi的计算如下:

4 具体算例
下面通过具体算例来进行算法的检验。
4.1 要地布阵情况
设置某阵地有一个指挥所,表示为保卫点,一个发射阵地,表示为一个圆形的保卫区域,一个机场,表示为矩形的保卫区域。以指挥所作为坐标系的原点,要地布阵情况如图7所示。其具体位置参数如表1所示。
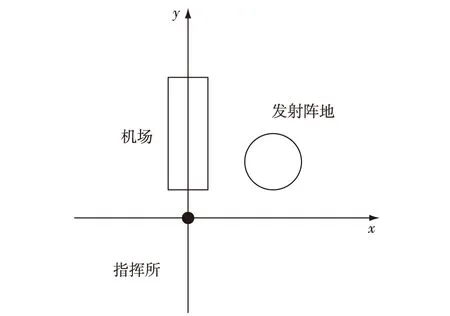
图7 布阵图
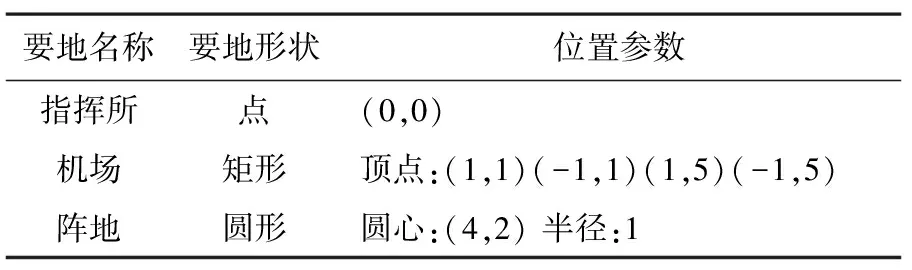
表1 要地位置参数 (单位:km)
4.2 目标参数情况
假定我方探测到5批来袭目标,其以指挥所为原点的参数如表2所示。其中角度表示目标航向与x轴的夹角。
4.3 威胁度计算
各目标对阵地各要地威胁度,以及综合威胁度计算结果如表3所示。

表2 目标参数

表3 目标威胁值
4.4 结果分析
从目标综合威胁度值结果可以看出,目标的综合威胁度排序为目标2>目标3>目标1>目标4>目标5,即针对多个保卫要地而言,保卫要地价值越高、目标到达时间越短、攻击意图越明显,则其综合威胁度越大,符合末端防空作战的战场实际态势情况。
5 结束语
本文提出了一种在末端防空中对多保卫要地进行目标威胁评估的方法,通过选取关键威胁因素,形成威胁因素的隶属函数,并分别对各个不同的保卫要地进行威胁评估再进行综合的方法,得出目标的综合威胁值,并通过仿真算例验证了该方法的有效性。
[1] 娄寿春.地空导弹射击指挥控制模型[M].北京:国防工业出版社,2009.
[2] Libhaber M,Feher B. Naval air defense threat assessment:cognitive factors and model[C]. Command and Control Research and Technology Symposium. USA:Naval Postgraduate School,2000:1-30.
[3] 付涛,王军.防空系统中空中目标威胁评估方法研究[J].指挥控制与仿真,2016,38(3):63-69.
[4] 刘健,王献锋,聂成.空袭目标威胁程度评估与排序[J].系统工程理论与实践,2001,21(2):142-144.
[5] 吴智辉,谢磊峰.空袭目标威胁判断及作战使用[J].情报指挥控制系统与仿真技术,2003,25(7):41-43.
[6] 张肃.空中目标威胁评估技术[J]. 情报指挥控制系统与仿真技术,2005,27(1):41-45.
Threat Assessment Based on Terminal Air Defense
SHI Bing-zheng1, WANG Xu-feng2
(1.Shanghai Electro-Mechanical Engineering Institute, Shanghai 201109;2.Shanghai Academy of Spaceflight Technology, Shanghai 201109, China)
According to the special demand of end defense air defense operations, combined with the guarded defense area, thepaper raises a method of target threat assessment, targeted selection of threat assessment factors, and the defensive area are subjected to threat assessment, and then a comprehensive assessment of the overall, get the comprehensive threat assessment, and through a simulation example to verify the feasibility and effectiveness of the algorithm.
threat assessment;terminal air defense;membership function
2017-01-13
2017-02-19
史秉政(1984-),男,山西太原人,硕士,工程师,研究方向为指挥控制系统。 王旭烽(1979-),男,高级工程师。
1673-3819(2017)02-0090-05
TJ762.1+3;E917
A
10.3969/j.issn.1673-3819.2017.02.018
猜你喜欢
作文小学高年级(2021年6期)2021-07-05
少先队活动(2020年8期)2020-09-11
少先队活动(2020年7期)2020-08-14
火力与指挥控制(2020年2期)2020-04-02
电子技术与软件工程(2020年7期)2020-02-05
弹道学报(2019年4期)2020-01-10
文苑(2019年24期)2020-01-06
意林·全彩Color(2019年8期)2019-09-23
弹道学报(2018年4期)2019-01-05
文苑(2016年32期)2016-11-26