
交叉口处现代有轨电车与其他机动车的平衡感应信号控制方法
2017-05-10 08:09:53吕柯兴
城市轨道交通研究 2017年4期
吕柯兴
(西南交通大学交通运输与物流学院,610031,成都//硕士研究生)
交叉口处现代有轨电车与其他机动车的平衡感应信号控制方法
吕柯兴
(西南交通大学交通运输与物流学院,610031,成都//硕士研究生)
介绍了现代有轨电车与机动车在交叉口的平衡感应信号控制方法,通过对现代有轨电车交叉口各入口排队车辆数的监测,实时改变信号配时,从而平衡各入口车辆排队长度;通过赋予现代有轨电车更高的排队权重,使现代有轨电车与同向机动车流减少停车时间,获得更多的通行时间,从而在保证其他机动车辆通行效率的同时,间接地实现现代有轨电车优先通行权。运用交通仿真软件对比分析各入口车辆平均排队长度、最大排队长度、总停车次数、平均延误与平均排队时长,确定各信号相位近似最优的最大感应绿灯信号时长。仿真结果表明,在排队长度与车辆延误方面,感应信号配时远优于定时信号配时;相比单纯的公共交通信号优先,感应信号控制更注重现代有轨电车和机动车每个乘客的通行权利。
现代有轨电车; 交叉口; 平衡感应信号控制; 最大感应绿灯时长
Author′s address School of Transportation and Logistics,Southwest Jiaotong University,610031,Chengdu,China
现代有轨电车凭借运量大、速度快、成本低、环境友好等特点逐渐应用于各大城市的主干道路中。随着城市优先发展公共交通政策的出台[1],为提升公共交通服务品质,现代有轨电车作为大运量公共交通方式在交叉口应享有一定优先通行权。但目前的现代有轨电车信号优先控制方式[2]并没有考虑到交叉口其他机动车辆的运行效率与通行权利。若现代有轨电车遵循传统的定时信号控制,则不能凸显公共交通在运行效率上面的优势;若对现代有轨电车实施强制信号优先,则会严重影响高峰时段冲突车流的运行效率,造成拥堵。本文提出的现代有轨电车与机动车在交叉口的平衡感应信号控制方法可保证各个机动车的通行权利,并间接实现现代有轨电车优先通行的策略,保证交叉口通行效率的最大化。
1 交叉口信号相位设计
现代有轨电车轨道在交叉口多采用平面交叉设计,以有效节约建造成本,方便乘客上下车。但这种设计使得现代有轨电车在交叉口必须遵守信号控制策略,同时造成冲突车流的跨轨道行驶。现代有轨电车轨道具有多种平面排布方式,常用的现代有轨电车轨道断面布置形式如图1所示[3]。

图1 现代有轨电车线路横断面布置形式
本文以现代有轨电车双线轨道中央布置形式为例,其平面布置形式如图2所示。现代有轨电车轨道铺设于城市主干道路之中,与之交叉的是城市次主干道或次干道。这里的城市干道等级是通过高峰时段车流量划分的。

图2 现代有轨电车交叉口平面图
由于现代有轨电车轨道采用中央布置形式,所以交叉口的所有入口左转车流都要横跨轨道,这对现代有轨电车的运行效率影响很大;又由于左转车流一般需要单独安排一个相位,所以交叉口各相位绿信比大大降低,车辆延误也随之增加。因此,该示例中实行机动车禁左通行,需要左转的车流可在直行后在下一次级交叉口左转,当前现代有轨电车交叉口信号相位由原来的四相位缩减至二相位[4]。如图3所示。
2 感应信号逻辑设计
由于交叉口主次干道到达车流数量随时间具有很强的随机性,因此感应信号控制系统应实时监测交叉口各入口路段的车辆到达数量,以改变信号相位的绿灯时长和转换相位。示例中通过在各入口路段添加车辆感应器来实时记录路段内运行车辆的数量,如图4所示。以路段1为例,在停车线各车道上设置车辆感应器,并在距停车线约100 m的路段上游位置各车道设置车辆感应器,通过计算两组车辆感应器感应到的车辆数目之差,可准确计算出当前时刻两组感应器之间的运行车辆数目。实时改变信号配时与转换相位,以平衡东西向路段1、3和南北向路段2、4的车辆数量。

图3 现代有轨电车交叉口信号相位

图4 路段上的车辆感应器位置设置
监测各入口路段车辆数的优势在于:第一,在车辆制动进入排队之前就监测出可能发生排队的车辆数,从而使系统提前判断是否延长绿相时长或切换到红灯相位;第二,监测路段内的车流在该信号控制下可以形成车队,从而尽量避免二次排队的发生。现代有轨电车是大运量公共交通,可在现代有轨电车路段单独设置车辆感应器,若监测到现代有轨电车,则给现代有轨电车的车辆数目增加一定倍数的权重,并累加到同向车流的车辆数目之中。示例中,当监测到现代有轨电车时,在原有东西路段车辆数目的基础之上增加20,以缩短东西走向车流的停车时间或延长通行时间,从而间接实现现代有轨电车的优先通行。感应信号控制系统的逻辑图如图5所示。

图5 感应信号控制逻辑图
在实际交叉口中,可通过其他技术手段监测各入口路段的车辆数目,如视频监测、GPS (全球定位系统)监测、车辆指纹识别、电子车牌识别等[5]。
3 示例仿真
示例为一个简化的现代有轨电车交叉口模型。模型中不考虑行人过街,且所有机动车辆禁止左转,机动车右转不受限制;东西走向机动车流量为2 400辆/h,南北走向机动车流量为1 600辆/h,且两个方向的机动车流量均衡,由东至西和由西至东的现代有轨电车发车间隔为2.5 min。机动车辆的产生均服从泊松分布,且机动车辆速度满足一定的线性分布,这样可很好地拟合到达车辆的随机性。模型的建立使用PTV Vissim交通仿真软件实现。感应信号控制的逻辑算法使用Vissim的Visvap模块实现[6]。为体现现代有轨电车交叉口感应信号控制的优势,本文以最佳定时信号控制为参照,制定了几组最大感应绿灯时长。通过Synchro交叉口配时仿真软件,确定了该模型的最佳定时信号配时方式[7],如图6所示。其中相位1分配时长26 s,相位2分配时长24 s,周期为50 s。为保证交叉口车辆的安全疏散,在感应配时与定时配时中设置了3 s的全红时长,3 s黄灯时长,1 s红黄灯时长[8],但这里的Synchro软件中没有设置红黄灯时长,因此相位1的绿灯时间(G1)约为20 s,相位2的绿灯时间(G2)约为18 s。

图6 Synchro交叉口配时结果
感应信号控制的各相位最大绿灯时长是根据定时配时确定的,表1为几组仿真中的最大感应绿灯时长。

表1 感应信号控制仿真环境 s
从表1中可以看出,每个仿真的相位1与相位2最大绿时比相似;仿真2的最大绿时和定时信号的绿时相同。通过对定时信号和4组感应信号的仿真,得到了5组仿真环境下各交叉口入口车辆的平均排队长度、最大排队长度、总停车次数、平均延误与平均排队时长。
3.1 平均排队长度与最大排队长度
表2为5组仿真环境下各车流入口处在每个仿真步长的平均排队长度。其中入口1~4为机动车流入口,入口5~6为现代有轨电车入口。由于现代有轨电车车流量远小于机动车流量,所以平均排队长度很小,入口6在仿真1、仿真3和仿真4环境下平均排队长度为零,表示入口6的现代有轨电车在这三种仿真环境下没有发生排队。

表2 不同仿真环境下各入口车流平均排队长度
由表2可知,定时信号的入口1、3平均排队长度最长,仿真1、3、4各入口平均长度较短且分布均衡,没有出现某个入口平均排队长度过长的情况。仿真2的平均排队长度表现一般,其中入口2、4的平均排队长度相比主干道明显长出很多,通过观察仿真动画,该仿真环境下的次主干道容易发生二次排队,在现实情况下容易产生拥堵。
平均排队长度只能反映交叉口各入口整体排队情况,而最大排队长度可反映各仿真环境下最差的排队情况。最大排队长度可体现各仿真环境对二次排队和交叉口拥堵的容错与疏散能力[9]。表3为各仿真环境下所有仿真步长中的最大排队长度。2节编组的现代有轨电车的排队长度等同于40辆机动车(有轨电车的排队权重为20)。由表3可知,现代有轨电车没有出现在同一入口多辆车同时排队的情况。
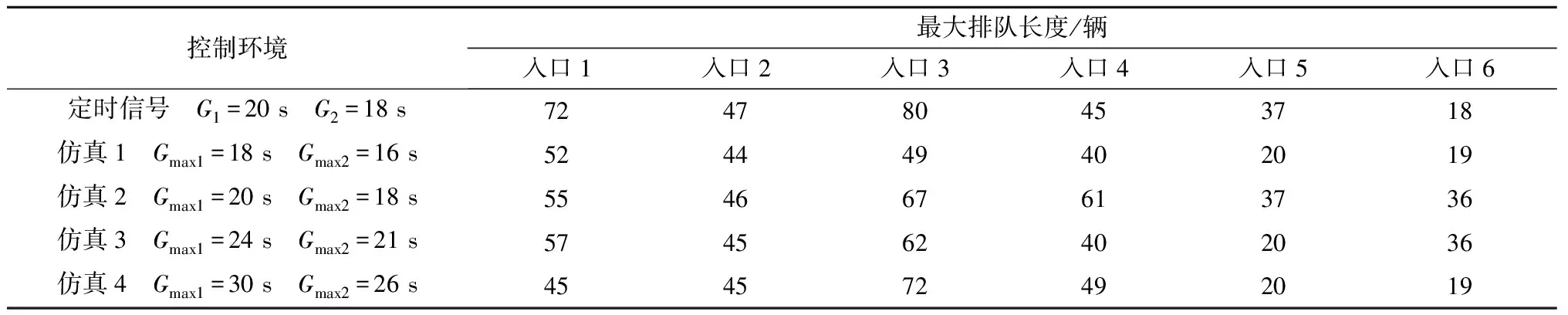
表3 不同仿真环境下各入口车流最大排队长度
由表3可知,所有感应信号控制环境的1、3车流入口的最大排队长度均小于定时信号控制的1、3入口最大排队长度,体现出该模型中感应信号控制在疏散较长车流排队的效率。
综合平均排队长度和最大排队长度来看,仿真1、3、4表现良好。
3.2 总停车次数和平均停车时间
表4统计了在1 h的实际仿真时间里,不同仿真环境下各车流入口的总停车次数。总停车次数可反映各入口车流通过交叉口的流畅度。

表4 不同仿真环境下各入口车流总停车次数
由表4可知,定时信号控制在入口1、3的总停车次数高于其他仿真环境的总停车次数,而感应信号控制的2、4入口的总停车次数相比定时信号控制表现一般。现代有轨电车在各仿真环境下的总停车次数变化不大,所以现代有轨电车的优先通行权利在停车次数上没有反应出来。
表5为不同仿真环境下各入口车流的平均停车时间。平均停车时间可很好地体现出现代有轨电车在各仿真环境下相比其他机动车辆在停车时间方面的优势,也能体现交叉口车辆运行的流畅度。

表5 不同仿真环境下各入口车流平均停车时间
由表5可以看出,所有感应信号控制环境的现代有轨电车平均停车时间均优于定时信号控制环境,但感应信号控制环境下与现代有轨电车冲突的2、4入口的平均停车时间要大于1、3入口的平均停车时间。这是由于现代有轨电车具有更高的排队权重,与现代有轨电车同向的车流也能够享受高权重带来的高通行率的好处。事实上,给现代有轨电车增加排队权重,是将车辆的通行利益平均分配给了乘客个人。现代有轨电车的乘客人数要远大于私家车乘客人数,模型中赋予现代有轨电车20倍的排队权重,相当于现代有轨电车的乘客人数是普通私家车乘客人数的20倍。这一数值也可根据实际情况做相应改变。对比仿真与定时信号控制环境的平均停车时间可知,仿真1、3在各入口平均停车时间上普遍优于定时信号。
综合来看,仿真1、3在缩短停车次数与停车时间上表现良好。
3.3 平均延误
平均延误可以体现一个交叉口在疏散交通上的效率[10],表6为各车流入口在不同仿真环境下的车辆平均延误。从表中可以看出,感应信号控制环境下的现代有轨电车入口5、6的平均延误远小于定时信号控制环境下的平均延误。感应信号控制环境在车流入口1、3上缩短车辆延误具有优势,仿真1、3在入口2、4的车辆延误上也表现良好。

表6 不同仿真环境下各入口车辆平均延误
综合来看,仿真1、3的表现远优于其他感应信号控制环境和定时信号控制环境。
3.4 结果分析
综合以上各种指标,仿真3的表现最优。在仿真3的运行环境下,虽然现代有轨电车的总停车次数相比定时信号控制环境没有优势,但平均停车时间和车辆平均延误大大减少,有效提高了现代有轨电车的通行效率,相当于间接赋予了现代有轨电车一定的优先通行权利。比较各类参数可知,该平衡感应信号控制可有效缩短车辆排队长度,从而减少二次排队和交叉口拥堵的发生;同时,机动车的平均停车时间比定时信号控制环境下缩减了许多,保证了机动车通过交叉口的流畅度;且各机动车流入口的车辆平均延误也远小于定时信号控制环境下的机动车平均延误。
4 结语
本文提出的平衡感应信号控制方法可在提高现代有轨电车通行效率的同时,保证其他机动车的通行权利。赋予现代有轨电车更高排队权重的做法,相当于把车辆的通行利益分配给了个人,能够凸显公交先行、以人为本的策略,有利于城市公共交通的发展。该平衡感应控制系统在提高交叉口通行效率上具有优势,且算法设计简单,硬件易于实现。在实际应用中,可根据该交叉口各入口车流随时间分布的大致情况,通过多次仿真确定各时间段近似最优的最大感应绿灯时长,从而协调现代有轨电车与其他机动车流的运行,达到整体运行效率最优的目的。
今后将进一步研究各相位最大感应绿灯时长与车流量的关系,从而确定各车流密度下最大绿时的判断方法,并将单点控制拓展到现代有轨电车线网的混合感应信号控制。
[1] 中华人民共和国国务院.关于城市优先发展公共交通的指导意见:国发(2012)64号[S].北京:中华人民共和国国务院,2012.
[2] 李凯,毛励良,张会,等. 现代有轨电车交叉口信号配时方案研究[J]. 都市快轨交通,2013(2):104-107.
[3] 李际胜,姜传治. 有轨电车线站布置及交通组织设计[J]. 城市轨道交通研究,2007(5):38-41.
[4] 张海军,杨晓光,张珏. 两种交叉口信号相位设计方法的比较[J]. 交通与计算机,2005(1):3-7.
[5] 刘相莹.智能交通中的车辆检测技术及其发展[J]. 科技信息(学术研究),2007(28):263-264.
[6] 王玉鹏.基于VISSIM的感应信号控制交通仿真研究[J]. 交通与运输(学术版),2009(1):43-46.
[7] 邹志云,陈绍宽,郭谨一,等. 基于Synchro系统的典型信号交叉口配时优化研究[J]. 北京交通大学学报,2004(6):61-65.
[8] (德)道路与交通工程研究学会.交通信号控制指南:德国现行规范RiLSA[M]. 北京:中国建筑工业出版社,2006:16.
[9] 姚荣涵,王铁成,王建丽,等. 协调信号交叉口间路段上的车辆排队模型[J]. 吉林大学学报(工学版),2011(6):585-591.
[10] 张卫华,陆化普. 公交优先的预信号控制交叉口车辆延误分析[J]. 中国公路学报,2005(4):78-82.
Equalized Actuated Signal Control for Modern Trams and Moter Vehicles at Intersection
LYU Kexing
The equalized actuated signal control for modern trams and moter vehicles at intersection is introduced.The signal timing is changing over the detection of the number of approaching vehicles at a tram intersection in order to balance vehicle queue length at each approach.By assigning a higher queuing weight to the tram,the stopping time of the approaching trams and motoer vehicles on the same direction is reduced and more passing time is provided.As a consequence,the tram enjoys indirectly a transit priority without increasing the delay time of motor vehicles,and the passing right for both trams and vehicles is equalized.By studying the average vehicle queue length,the maximum vehicle queue length, the total vehicle stopping time,the average vehicle delay time and the average vehicle stopping time,an approximate optimal maximum actuated green time is confirmed.By analyzing the output of a traffic simulation software,the equalized actuated signal control outperforms the optimal fixedtime control in respect of vehicle queue length and vehicle delay time.In comparison with aggressive transit signal priority,the equalized actuated control focuses more on every passenger′s passing right.
modern tram; intersection; equalized actuated signal control; maximum actuated green time
U482.1
10.16037/j.1007-869x.2017.04.015
2015-05-26)
猜你喜欢
工会博览(2022年33期)2023-01-12 08:52:32
小学生学习指导(低年级)(2021年4期)2021-07-21 01:59:26
扬子江(2019年3期)2019-05-24 14:23:10
小学生学习指导(低年级)(2018年9期)2018-09-26 05:59:44
学生天地(2018年18期)2018-07-05 01:51:42
重庆交通大学学报(自然科学版)(2017年3期)2017-05-17 03:37:32
浙江大学学报(工学版)(2016年9期)2016-06-05 09:20:55
中国房地产业(2016年2期)2016-03-01 01:25:37
数学教学通讯·初中版(2015年5期)2015-06-17 15:33:29
系统工程学报(2015年3期)2015-02-28 19:54:01
