自助跟随平衡车的电子控制器设计与实现
2017-05-10 07:02彭远哲
计算机测量与控制 2017年4期
彭远哲
(西南科技大学 信息工程学院,四川 绵阳 621010)
自助跟随平衡车的电子控制器设计与实现
彭远哲
(西南科技大学 信息工程学院,四川 绵阳 621010)
随着科技的不断发展,多种智能感应技术被广泛使用,为人们的生活、工作、学习带来便利;平衡车作为新生的代步工具,具有体积小巧、携带方便、操作简单、代步快捷等优点,正被越来越多的年轻人所接受;但是,传统自主跟随平衡车的电子控制器存在多传感器交互性差、传感器数值运算逻辑滞后、控制响应度差等问题,导致用户体验度降低,限制了自助跟随平衡车的研究与发展;针对问题根源,提出了自助跟随平衡车的电子控制器设计与实现方法;采用多维运算逻辑、动态传感电路、瞬态信号回传技术,对传统自主跟随平衡车的电子控制器存在的问题进行改进设计;通过仿真实验测试证明,提出的自助跟随平衡车的电子控制器设计与实现方法,具有多感应器数据交互运算准确、执行响应度高、指令运行稳定等优点。
自助跟随;平衡车;电子控制器;传感器
0 引言
几年来,随着科技的飞速发展,各种传感技术被广泛应用,如重力传感器、红外感应器、速度传感器、温度传感器、电频传感器等一系列传感设备,已经应用于人们生活、工作、学习的各个领域,为人们提供高效、安全、快捷的使用体验与保障。同时,现代化建设进程不断推进,加快了城市中人们的生活步伐,工作节奏快速化导致城市中车流量不断增加,大量的尾气排放严重影响环境的空气质量,雾霾天气的大范围出现,为人们敲响了环境污染的警钟。因此,选择一种绿色环保、高效便捷的交通工具成为人们的诉求。
自助跟随平衡车的出现,极大地满足了上述人们的愿望,自助跟随平衡车上装载了大量的传感器,通过传感器之间的数据交互,完成人工指令的接收到处理,最后执行一系列运算,保障准确运算的关键就在于自助跟随平衡车的电子控制器。传统的自助跟随平衡车的电子控制器设计上,存在一系列的指令运算问题,如:1)多传感器交互性差[1-2],导致平衡车执行结果出错,极易为使用者带来危险;2)传感器数值运算逻辑滞后[3-4],造成指令发送与指令执行不能同步,影响使用者使用体验;3)控制响应度差[5-6],人工指令已发送,但传感器没有接收到,无法按照使用者意愿运行,降低产品的可用度。
针对上诉问题,提出了自助跟随平衡车的电子控制器设计与实现方法。采用多维运算逻辑对传统电子控制器的多传感器交互运算逻辑进行优化修正;通过动态传感电路对传统电子控制器的信号传输电路进行改进,使其满足在多种感应信号回馈汇总处理状态下,实时调整各部分传感器参数,保证指令操作的同步性;最后,采用瞬态信号回传技术,对传统自主跟随平衡车的电子控制器存在的感应指令传输滞后问题,进行信号传输逻辑重新运算,提升传输信号传输频率,优化电频干扰;将传感器与控制器指令端进行点对点绑定,彻底解决传感器无响应的问题。
通过仿真实验测试证明,提出的自助跟随平衡车的电子控制器设计与实现方法,具有多感应器数据交互运算准确、执行响应度高、指令运行稳定等优点。
1 自助跟随平衡车的电子控制器设计与实现方法
1.1 电子控制器架构设计及实现思路
电子控制器架构由设计环境、架构描述文件和架构运行环境构成。在设计环境用户可进行重构操作,设计符合工程要求的控制器参数,且自动保存在电子控制器描述文件中;运行环境导入该文件,调用解析器解析且自动生成相应的数据。电子控制器架构如图1所示。
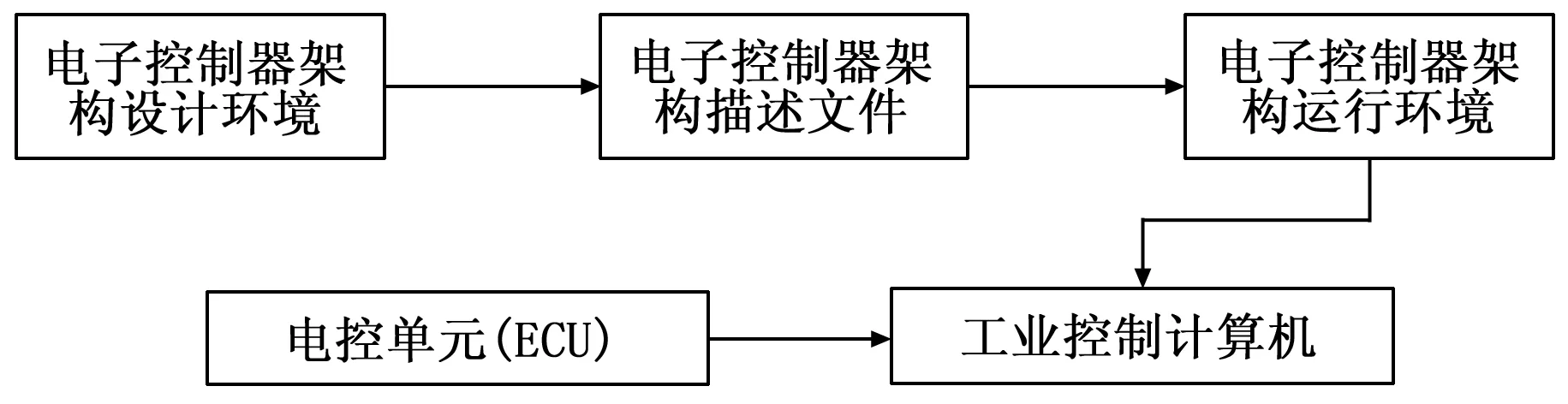
图1 电子控制器架构
在电子控制器架构设计的基础上,本文采用多维运算逻辑工作原理,提出自助跟随平衡车的电子控制器设计与实现方法。
1.2 多维运算逻辑
自助跟随平衡车内部有多种感应传感器分别负责车体的平衡、速度、方位等数据。多种感应数据的交互、处理、执行有电子控制器进行综合分析处理。传统电子控制器在使用中发现,经常出现使用者做出前进的动作指令,而车体做出转弯或间歇前进的错误动作,给使用者造成很大的不便[7-8]。经过对车体内部的各区域感应器的数据分析发现,自助跟随平衡车的各区域感应数据正常,错误出现在多类数据汇总后处理分析执行的过程当中。通过对传统电子控制器主控的分析逻辑深入分析后发现,传统电子控制器内部的主控分析逻辑存在多指令数据交汇处理逻辑滞后性错误。
简单说,当车体的陀螺仪感应到车体角度发生前倾至48度角时,会将数据信号回传至电子控制器主控数据采集端;同时,距离、速度等感应数据也会第一时间汇集到主控数据采集端,多数据汇总后,由主控分析逻辑进行综合分析处理,处理结果以电频信号形式经电频传感器传至电机驱动,完成指令操作。但是,主控分析逻辑存在错误时,多数据出现信号滞留现象,缺陷逻辑无法做出正确分析,固然无法下达正确电频信号给电机驱动,车体运动出错也在所难免。由此不难得出,对传统电子控制器主控内部的分析逻辑进行修正,是解决上述问题的关键。
提出的自助跟随平衡车的电子控制器设计与实现方法中,针对传统电子控制器内部的分析运算逻辑错误做了相应的单元设计。采用多维运算逻辑单元对传统自助跟随平衡车主控内部,分析运算逻辑进行滞后数据偏差矫正处理,利用外围数据执行式进行数据升级修复,替换传统电子控制器主控底层数据框架,更新多维数据综合处理分析逻辑执行式。提升控制器对各区域感应器回传数据信号分析下浅度,提高指令执行准确度。多维运算逻辑关系式有三部分构成如下所示。
(1)
式(1)在主控多传感器数据处理出现逻辑错误的状态下,由外部电频信号反馈激活,算法将对传统自助跟随平衡车的电子控制器内部错误运算逻辑进行错误补偿处理,并对传统自助跟随平衡车的电子控制器内部错误运算逻辑进行逻辑错误点修正。
(2)
式(2)在主控多传感器数据处理出现逻辑错误,且满足式(1)无法对其进行修复的条件下,由外部电频信号反馈激活,算法将对传统自助跟随平衡车的电子控制器内部错误运算逻辑进行逻辑底层数据强制更新,达到修成错误的目的。
ifhsed/*kdshμ∴(Y/N)
(3)
式(3)在接收到外部电频信号回馈后,进行自重选择性引导启动式(1)或(2),对传统自助跟随平衡车的电子控制器内部错误运算逻辑进行修正命令执行。
上述式(1)~(3)分别为多维运算逻辑的错误补偿式、逻辑升级式与执行引导式。式(1)~(3)共同构成提出的自助跟随平衡车的电子控制器设计与实现方法中多维运算逻辑单元。
上述提出的自助跟随平衡车的电子控制器设计与实现方法中,多维运算逻辑单元式(1)与(2)的执行状态是由提出的自助跟随平衡车的电子控制器设计与实现方法中多维运算逻辑单元式(3)的动态分析决定。
提出的自助跟随平衡车的电子控制器设计与实现方法中多维运算逻辑单元多维运算逻辑工作原理如图2所示。
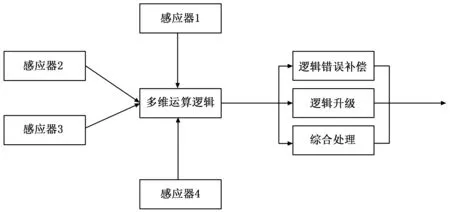
图2 多维运算逻辑工作原理
对提出的自助跟随平衡车的电子控制器设计与实现方法中,多维运算逻辑单元进行性能与可行性仿真测试。测试设置:在6种传感器模拟信号中,随机选取3种信号回传至传统自助跟随平衡车电子控制器,当信号处理出现错误时,进行多维运算逻辑单元切入修正,对比前后信号处理准确度,具体参数如表1所示。
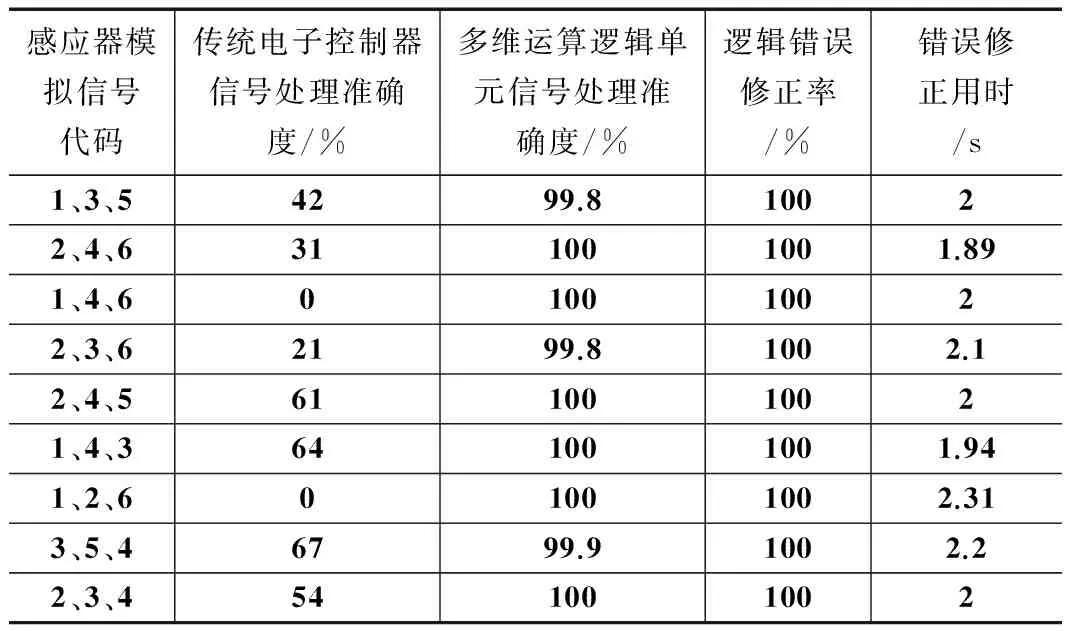
表1 多维运算逻辑单元进行性能与可行性测试参数
通过上述表1的测试数据可以充分证明,提出的自助跟随平衡车的电子控制器设计与实现方法中,多维运算逻辑单元具有多路传感器数据信号处理速度快、准确度高、错误逻辑修正速度快、修正率高、整体运行稳定等优点,能够彻底解决传统自助跟随平衡车的电子控制器中多传感器交互性差,导致平衡车执行结果出错的问题。
1.3 动态传感电路
传统自助跟随平衡车在日常使用中除上述问题外,还出现执行指令不同步的现象。通过对20位使用者的随机抽取,测试发现,20位使用者在使用传统自助跟随平衡车的过程中都不同程度的出现了操作指令执行响应时间过长、指令信号处理滞后的问题。具体参数如表2所示。
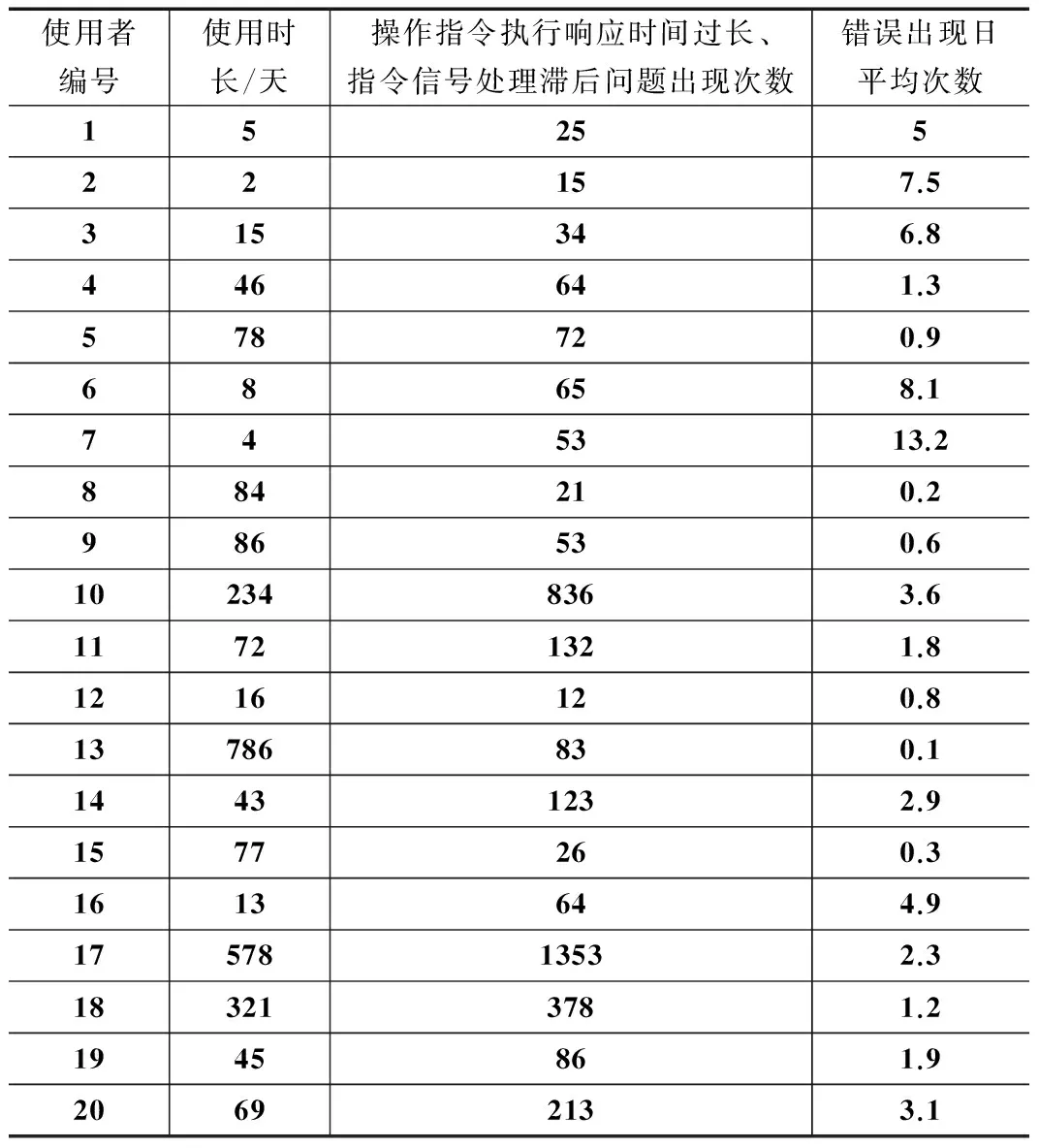
表2 传统自助跟随平衡车日常使用错误数据采集表
通过对上述表2的数据进行分析发现,传统自助跟随平衡车存在很严重的操作指令执行响应时间过长、指令信号处理滞后问题,且具有普遍性。为了从问题根源彻底解决,对传统自助跟随平衡车的控制器进行拆解分析,通过深入研究发现,导致传统自助跟随平衡车操作指令执行响应时间过长、指令信号处理滞后问题的根源在于传统控制器的感应器传感电路的设计上。如图3所示,传统自助跟随平衡车电子控制器内传感器电路的设计采用单路供电二次助传的方式,虽然可以保证数据传输的供电稳定,但是当数据电频信号频率多时间增大时,会出现电阻制衡,产生指令延迟。
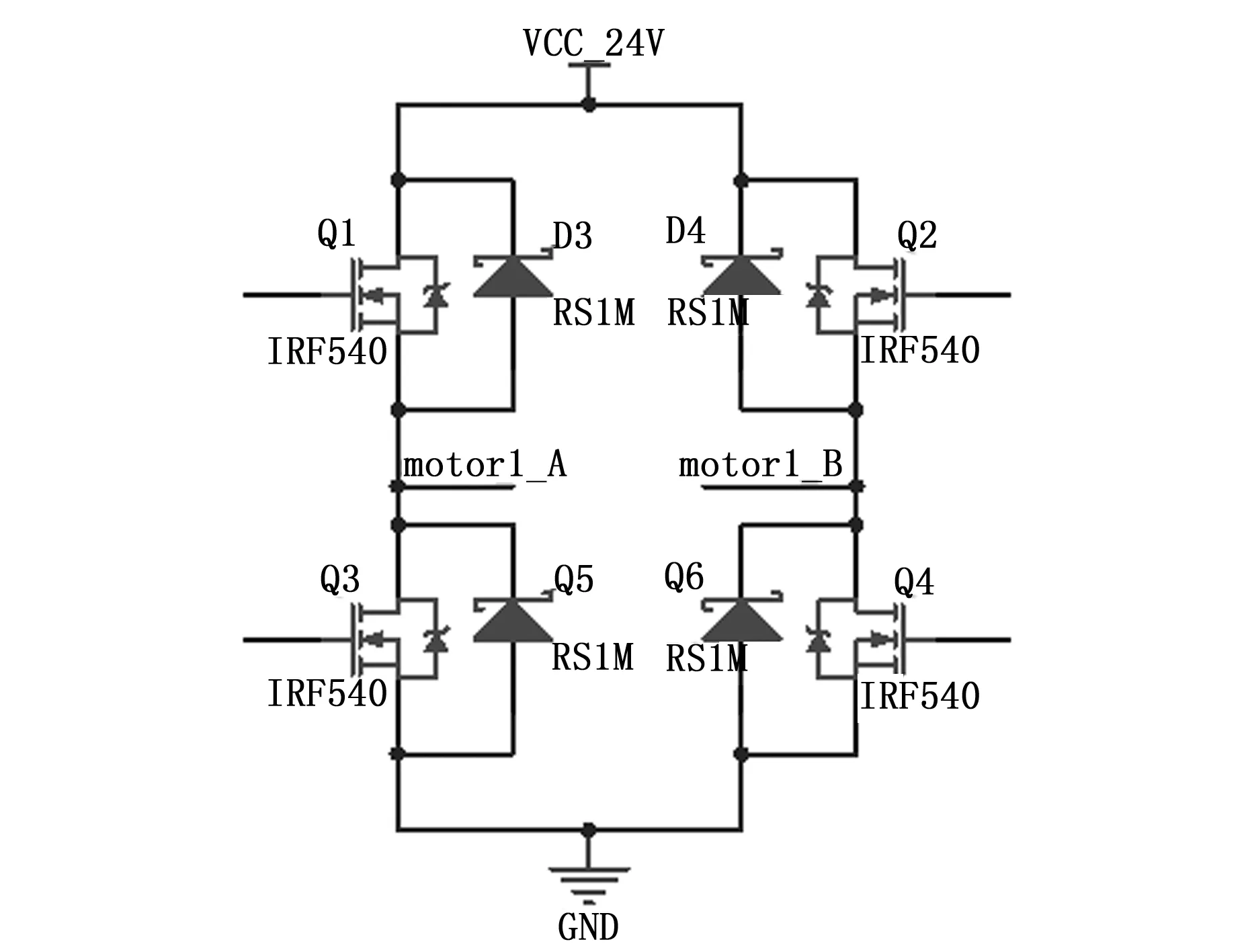
图3 传统自助跟随平衡车电子控制器内传感器电路
为此,若想彻底解决传统自助跟随平衡车电子控制器内传感器电路存在的问题,就必须对传统自助跟随平衡车电子控制器内传感器电路进行重新设计。提出的自助跟随平衡车的电子控制器设计与实现方法中,采用动态传感电路设计方式,改变传统自助跟随平衡车电子控制器内传感器电路的供电与指令信号的传导方式,减少电阻安装组数,优化电频信号的传输功率算法,稳定供电,动态监测电路中的信号点,实时对信号传输参数进行修正,动态调整电路整体参数。动态传感电路采用多路信号补偿回传的设计方式,实现单路电路数据错误时,辅助电路可以进行信号补偿传导,保证传感器信号执行传导的连续性,从根源彻底解决传统自助跟随平衡车电子控制器内传感器电路存在的操作指令执行响应时间过长、指令信号处理滞后、执行指令不同步的问题。动态传感电路如图4所示。
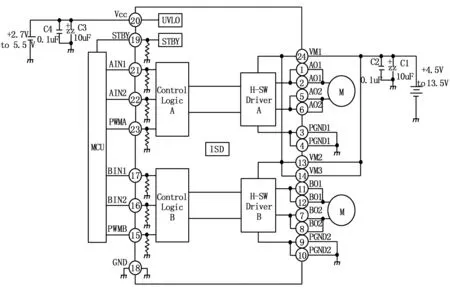
图4 动态传感电路
对提出的自助跟随平衡车的电子控制器设计与实现方法中动态传感电路进行可行性仿真实验测试。对动态传感电路进行连续1500小时的连续性测试,测试动态电路对随机模拟传感器指令执行响应速度、执行准确度与稳定性,随机抽取18组时间点数据,具体参数如表3所示。
通过表3的仿真测试数据可以充分证明,提出的自助跟随平衡车的电子控制器设计与实现方法中动态传感电路具有传感器指令执行响应速度快、执行准确度高、稳定性好的特点,从根源解决了传统自助跟随平衡车电子控制器内传感器电路存在的问题。
1.4 瞬态信号回传技术
通过提出的自助跟随平衡车的电子控制器设计与实现方法中多维运算逻辑与动态传感电路的优化改进,基本解决了传统自助跟随平衡车电子控制器内传感器电路存在的问题。但是,考虑到优化后的电子控制器的整体执行响应速度与传统自助跟随平衡车电子控制器执行响应速度差距较小,无法更好的提升用户使用体验。为此,提出的自助跟随平衡车的电子控制器设计与实现方法中采用瞬态信号回传技术,对电子控制器主控核心AD采集交互点进行信号算法优化,提升信号通道内的电频活跃系数,加速信号回传节点通透度。从而,达到信号响应零延迟的目的。
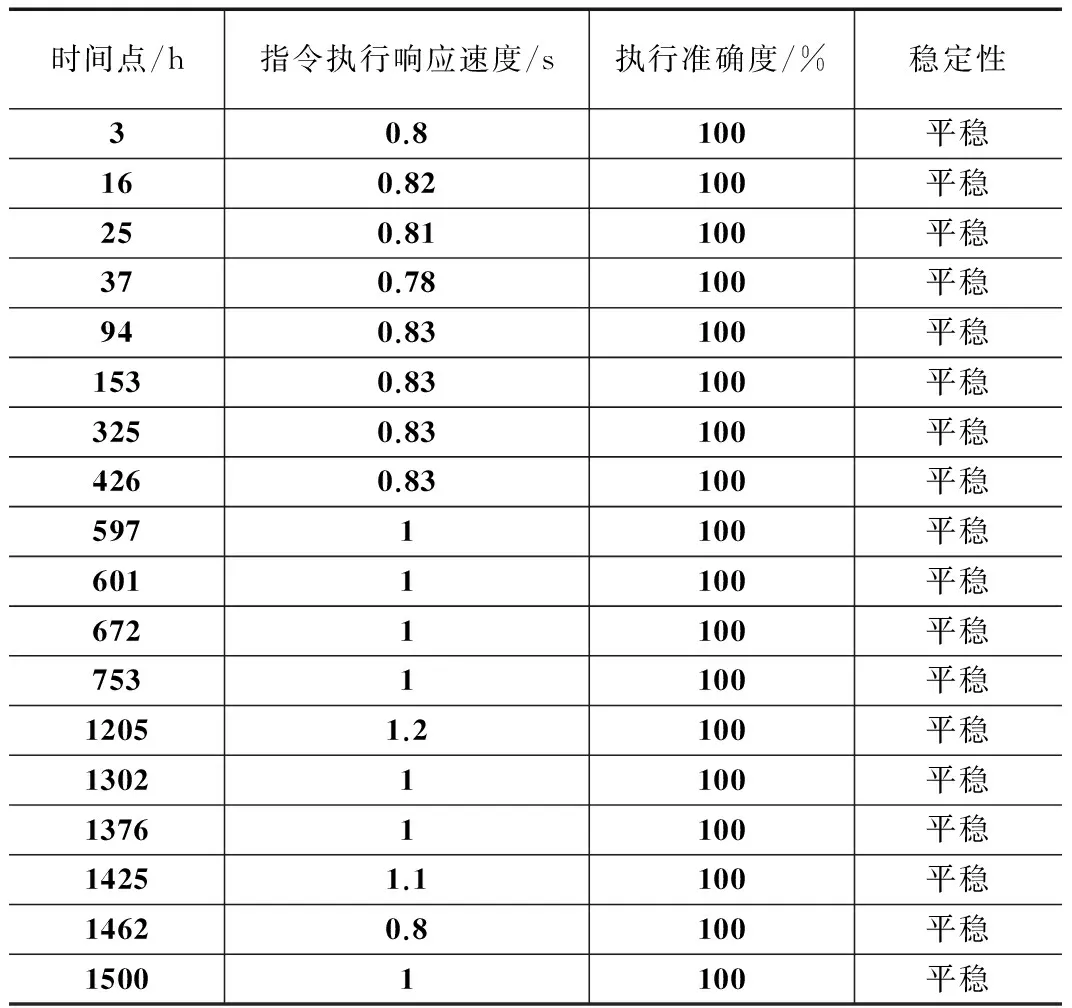
表3 动态电路可行性测试随机抽取数据参数
瞬态信号回传技术采用FS信号瞬导算法,对传统自助跟随平衡车的电子控制器主控的核心AD采集交互点进行针对性运算逻辑优化,加强原有主控节点运算力,利用BEX逻辑框架替换原有核心AD采集交互点底层框架,瞬态执行优化后的节点传输逻辑,保证FS信号瞬导算法高权限执行效果。FS信号瞬导算法关系式如下所示:
(4)
关系式中,当电频系数x与节点通透系数n相等时,关系式为:
(5)
对瞬态信号回传技术进行信号回传速度仿真测试,并对测试结果进行曲线图生成,通过与传统自助跟随平衡车电子控制器的信号回传曲线进行对比,证明其优越性,曲线图如下所示。
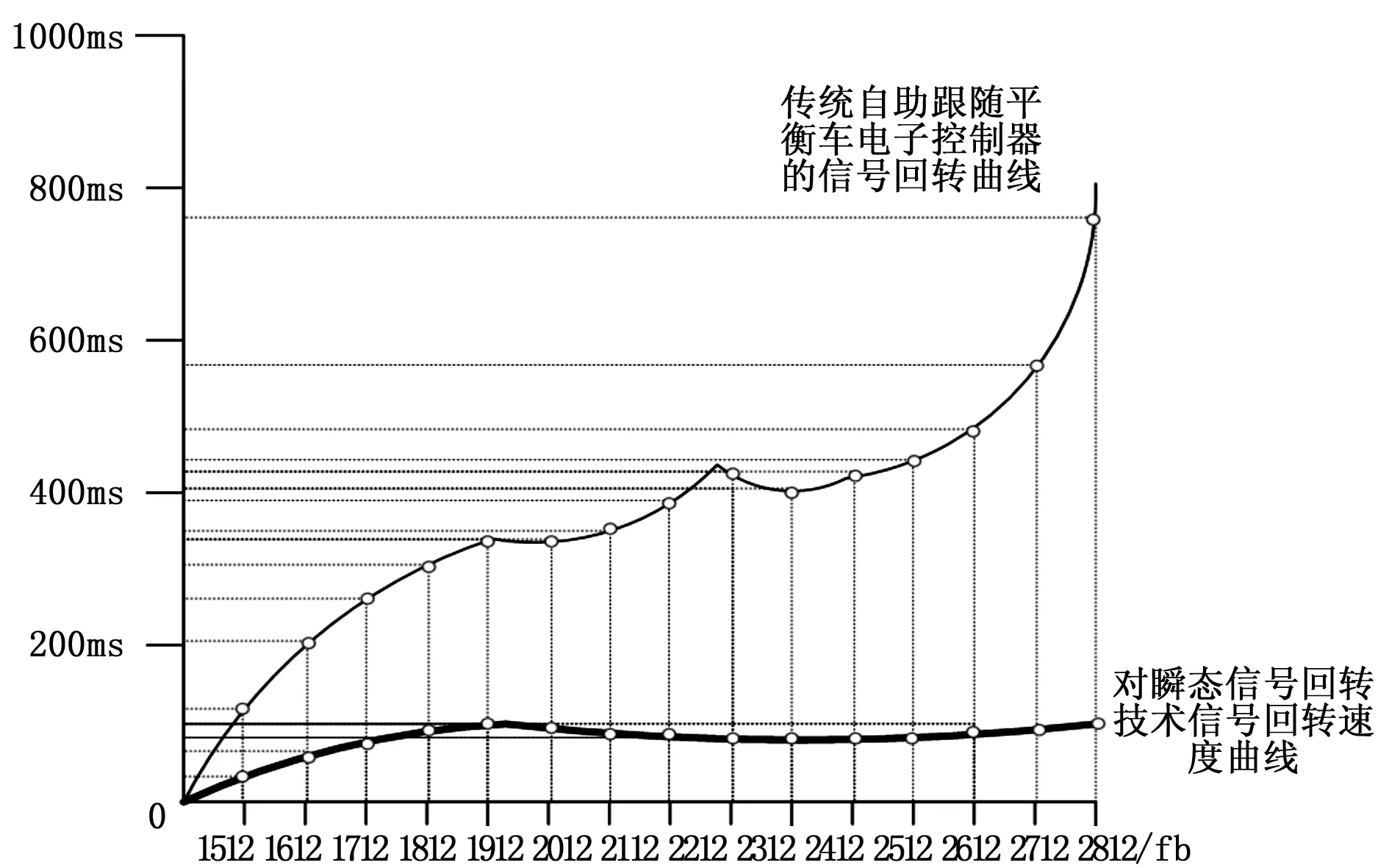
图5 对瞬态信号回传技术信号回传速度与传统自助跟随平衡车电子控制器的信号回传速度对比曲线
通过图5可以充分证明,提出的自助跟随平衡车电子控制器设计与实现方法中瞬态信号回传技术,对提升自助跟随平衡车的电子控制器信号传输具有显著作用。
2 实验与结论
通过上述针对性测试实验可以充分证明,提出的自助跟随平衡车电子控制器设计与实现方法中的每一独立单元都符合设计要求。为了证明提出的自助跟随平衡车电子控制器设计与实现方法整体具有较强的错误修正能力与稳定的可行性,进行针对性仿真模式测试。对提出的自助跟随平衡车电子控制器设计与实现方法进行整形性能仿真测试,并与传统自助跟随平衡车电子控制器处理数据进行对比,具体参数如表4所示。
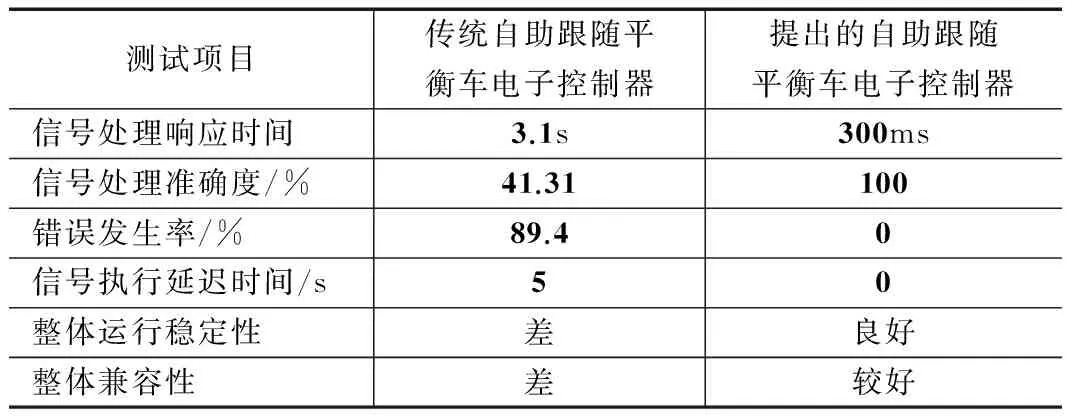
表4 整体性能测试参数
通过上述数据的对比充分证明,提出的自助跟随平衡车电子控制器设计与实现方法,具有较强的信号错误修复能力与快速执行能力,并且整体运行稳定性与兼容性好。从问题根源解决了传统自助跟随平衡车电子控制器存在的一系列问题,满足设计改进要求。
3 结束语
通过对传统自助跟随平衡车电子控制器存在的问题,进行分析研究,找到问题产生根源。提出自助跟随平衡车电子控制器设计与实现方法,通过多维运算逻辑、动态传感电路、瞬态信号回传技术对传统自主跟随平衡车的电子控制器存在的问题进行改进设计。通过仿真实验测试证明,提出的自助跟随平衡车的电子控制器设计与实现方法,具有多感应器数据交互运算准确、执行响应度高、指令运行稳定等优点。
[1] 高银平. 两轮自平衡车的变结构控制与参数整定方法研究[D].合肥:合肥工业大学, 2014.
[2] 梁光胜, 杜梦楠, 周子豪,等. 基于互补滤波的两轮自平衡车姿态控制[J]. 测控技术, 2015, 34(5):72-74.
[3] 赵 曜, 龚见素, 张雨涵. 基于K60的动态闭环自主循迹平衡车控制系统硬件设计[J]. 山东工业技术, 2016,10(4):260-267.
[4] 高银平. 两轮自平衡车的变结构控制与参数整定方法研究[D]. 合肥:合肥工业大学, 2014.
[5] 魏乐乐. 独轮自平衡车控制系统的开发[D]. 杭州:浙江大学, 2016.
[6] 杨 彬, 陈裕平. 纯电动车无刷直流电机控制器设计[J]. 山东工业技术, 2015,12(16):110-114.
[7] 李子轩, 林贵平, 曾 宇,等. 基于LabVIEW的电子式氧调器PID控制系统的设计[J]. 计算机测量与控制, 2016, 24(3):80-83.
[8] 关俊强, 左丽丽, 吴维林,等. 基于FPGA和CAN控制器软核的CAN总线发送系统的设计与实现[J]. 计算机测量与控制, 2016, 24(3):281-284.
Buffet with Balanced Car Electronic Controller Design and Implementation
Peng Yuanzhe
(Department of Information Engineering, Southwest University of Science and Technology, Mianyang 621010,China)
With the continuous development of science and technology, a variety of intelligent sensing technology is widely used, brings about lots of conveniences for people’s life, work and study. Balance of the car as a new transport, has small volume, convenient to carry, simple operation, and the advantages of walking fast, is accepted by more and more young people. But the traditional electronic controller independently with balanced car multi-sensor poor interactivity, sensor lagging numerical arithmetic logic, control, poor responsivity, results in the decrease of user experience degrees, limits the self-help balanced car research and development. For root causes, and puts forward the buffet with balanced car electronic controller design and implementation method. The multidimensional operation logic, dynamic sensing circuit, the transient signal back technology to the traditional independent follow balance problems existing in the electronic controller to improve the design of the car. Through the simulation test proves that the proposed buffet with balanced car electronic controller design and the realization method of data interaction operation with multiple sensors accurately and to execute commands high responsivity, stable operation, etc.
self-help to follow; balanced car; electronic controller; sensor
2017-01-12;
2017-02-09。
西南科技大学大学生创新基金项目(CX2016-103)。
彭远哲(1995-),男,河南南阳人,主要从事嵌入式系统方向的研究。
1671-4598(2017)04-0096-04
10.16526/j.cnki.11-4762/tp.2017.04.027
TP23
A
猜你喜欢
法律方法(2022年2期)2022-10-20
中学生数理化(高中版.高考数学)(2022年1期)2022-04-26
中学生百科·大语文(2021年11期)2021-12-05
纺织科学研究(2021年7期)2021-08-14
数码世界(2020年12期)2021-01-20
数学小灵通(1-2年级)(2020年6期)2020-06-24
学校教育研究(2020年11期)2020-06-08
37°女人(2017年11期)2017-11-14
中学生数理化·八年级数学人教版(2017年2期)2017-03-25
科技传播(2015年20期)2015-03-25