一种娱乐静态机器人装置研究
2017-05-08 18:12程志杰李文锦
大陆桥视野·下 2016年9期
程志杰+李文锦

【摘 要】提出了一种新型娱乐静态机器人装置机器控制方法,提供了结构简单,设计新颖的一种静态机器人装置。实践证明,该系统结构简单,设计新颖合理,与电控元件相配合能实现特定动作并自动出币。
【关键词】娱乐机器人;MCU;出币
引言
机器人是自动执行工作的机器装置。它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动,机器人一般由执行机构、驱动装置、检测装置和控制系统和复杂机械等组成,国际上对机器人的概念已经逐渐趋近一致,即机器人是靠自身动力和控制能力来实现各种功能的一种机器[1]。
本文的目的是针对以上不足之处,提供了结构简单,设计新颖的一种静态机器人装置。
1.静态机器人系统设计
1.1 静态机器人的结构设计
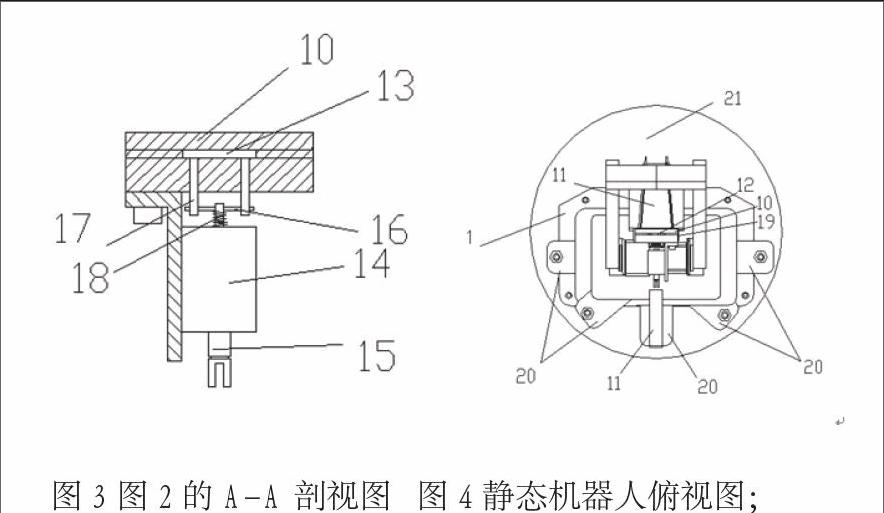
本文所解决技术问题所采用的方案是,如图1~6所示,一种静态机器人装置,包括底座1,底座1安装固定于固定座21上,底座1中部设置有直立的步进电机2,底座1上部设置有若干个延伸臂20,延伸臂的末端设置有金属传感器24;底座1上方连接有由步进电机2驱动的基座3,基座3与底座1之间设置有轴承4,基座3上设置有与下方的延伸臂20上的金属传感器24相配合以进行限位的感应板11,基座3上设置有由电机7驱动的吊臂装置及由电磁吸合装置控制9的出币装置,吊臂装置与吊臂抓手22相配合;吊臂装置包括对称设置在基座上的两基板5,两基板5外侧铰接肋板6,肋板6与转动吊臂8相连接,两基板5之间设置有电机7,电机7输出轴穿过一侧基板5后与肋板6固定连接,以实现对对吊臂8的转动控制;出币装置包括纵向设置的与ATM连接的开设有出币槽13的板体10,板体10一侧设置有若干电磁吸合装置9,板体10另一侧设置有挡板19,挡板19下方设置有出幣口,为了能更顺利快速的出币,出币口处连接有斜置的出币滑道12;的固定座21上设置有一电路安装盒,的电路安装盒内设置有一电路板,电路板上设置有一MCU以及与该MCU连接的无线通信模块、步进电机驱动电路、电机驱动电路、继电器驱动电路、蜂鸣器、LED显示电路和LED灯驱动电路;的步进电机驱动电路用于驱动的步进电机,电机驱动电路用于驱动电机;继电器驱动电路驱动一继电器控制电磁吸合装置工作,金属传感器与MCU连接;LED灯驱动电路用于驱动一指引LED灯。
如图3所示,在本设计中,所述电磁吸合装置9包括电磁铁14和贯穿电磁铁14的活动柱15,为了实现对出币的控制,所述活动柱15前端设置有带有锁止销17的可被电磁铁14吸合的铁质圆盘16,为了保证电磁铁14断电后铁质圆盘16能够回位,所述铁质圆盘16与电磁铁14之间的活动柱15上套设有弹簧18。在本实施例中,所述板体10上设置有与锁止销17相对应的销孔,这样通过电磁吸合装置的锁止销,锁定出币槽13内的硬币,在出币时,MCU控制电磁吸合装置动作,硬币则从出币槽掉入出币滑道12。
本实施例的工作过程如下:基座3装有轴承4,由步进电机2驱动,可实现360度旋转,吊臂8与基座3一起旋转,延伸臂20通过金属感应传感器配合感应板11结合限位,可控制吊臂8与基座4的旋转角度,MCU通过程序控制电机7实现吊臂8的转动升降,请参见图5,等待接应运动机器人到达目的地后,静态机器人上的吊臂8可以旋转到任意角度,使得该动态机器人的吊臂抓手22与设置在静态机器人上的吊臂8相配合,该动态机器人可以被吊臂8提到适当高度,同时动态机器人上的接币滑道23与出币滑道12对接,设置在静态机器人内的电磁铁14得电,硬币则从出币滑道12滑到接币滑道23内;当滑出的硬币数达到一定时,则停止出币,静态机器人将该动态机器人放至地面,同时接币滑道23与出币滑道12分开,且该动态机器人的吊臂抓手22与静态机器人上的吊臂8松开,动态机器人顺利的将ATM内的硬币接走。
2. 结论
本系统运动稳定,可靠性好,能够有效快速完成该娱乐机器人既定的工作任务。
参考文献:
[1] 李瑞峰.中国工业机器人产业化发展战略[J]. 航空制造技术. 2010(09)