ANSYS梁体组合连接计算方法的讨论
2017-05-08 12:09卢星辅
科技创新与应用 2017年12期
卢星辅
摘 要:在有限元分析中,常常需要采用桿梁、板壳、实体单元之间的组合建模以实现对实际工程结构的模拟,这就需要考虑不同单元间的连接。文章讨论了梁体连接中cerig命令、ceintf命令以及MPC算法的差异,并通过相关算例进行了对比,总结了各种方法的优缺点及适用范围。
关键词:ANSYS;梁单元;壳单元;实体单元;单元连接
1 概述
有限元分析中,实体单元在理论上可以用于各个结构的模拟。而实际工程中的结构是十分复杂的,若都采用实体单元进行模拟,首先是建模困难,效率低下;其次是划分网格后节点众多,造成求解代价巨大,并且有些结构,如板壳结构、杆梁结构,采用实体单元分析的精度并不理想。因此,建模分析时常常是采用“杆梁壳体”组合模拟。因为自由度不协调的问题,采用ANSYS分析时,需要处理各个单元之间的连接。而壳体、梁体、壳梁的组合是经常要用到的,比如桥梁工程中墩台与桥面板之间的连接,根据分析精度的不同可以选择梁体或壳梁组合。
在梁体的组合建模中,梁体之间只要有公共节点就可以连接,不需要约束方程。而梁体之间有公共节点的连接是铰接,不是刚接。要实现其他形式的连接,则必须通过耦合自由度来实现连接,或通过MPC算法实现连接。
2 ANSYS中的实现方式
2.1 耦合与约束方程
对于不同单元之间的连接问题,常用的办法是耦合自由度或写约束方程。耦合自由度是指:使两个或多个自由度“相等”,耦合集中包含一个主自由度和多个从自由度,只有主自由度保存在矩阵中,而其他自由度则删除,所以耦合自由度实际上是降低了平衡方程的个数。而约束方程就是把某个节点的自由度与其他一个或多个节点的自由度通过“方程”联系起来。约束方程可以代替自由度耦合,并且比自由度耦合更加通用。Cerig与Ceintf命令都是通过自动生成约束方程这种方式实现连接。
2.2 MPC多点接触算法
Multi-Point Constraints即多点约束方程。它定义了一种节点自由度之间的耦合关系,使用内部生成的约束方程在接触面上保证变形协调,以一个节点的某几个自由度为标准值,将其它节点的指定自由度与这个标准值建立关系。多点约束采用接触单元实现,可以通过keyopt的设置处理一些特定的连接问题,比如刚性连接、铰接,除此之外还可用于连接非协调网格,施加远端载荷等。
3 算例对比
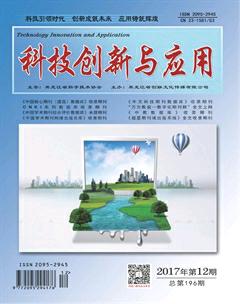
梁体连接中,实体为方形柱5m*5m*10m,梁长度为5m*10m。自由端根据命令的不同选择不同的约束,施加集中力1000N。模型如图1:
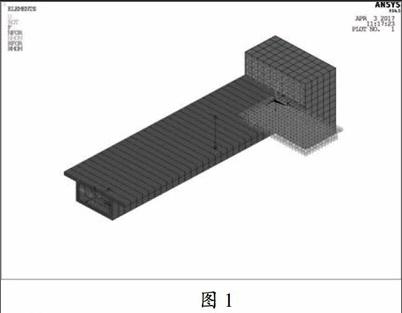
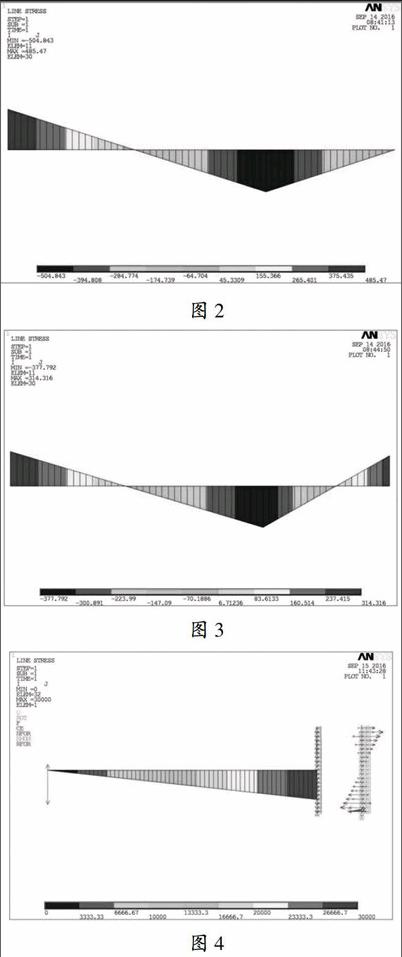
梁体连接的cerig、ceintf与MPC法对比:
建立模型,分别采用cerig、ceintf以及MPC处理梁与实体之间的连接。采用ceintf在界面上自动生成约束方程,约束所有自由度。弯矩图如图2。采用MPC连接,通过接触单元的keyopt设置约束,约束所有自由度,弯矩图如图3。由弯矩图可知当采用ceintf约束所有自由度时表现出的仍然是铰接。建立模型,采用cerig命令处理连接,弯矩图如图4。由图4可知,cerig只能形成刚性连接,且刚性界面上的节点不能被约束。
4 结束语
通过计算对比得出结论如下:(1)cerig命令只能实现刚性连接。施加自由度约束时,刚性界面上的节点不能被约束,并且(壳体连接)在进行网格划分时要求两个相邻单元网格对齐。(2)ceintf在约束平动自由度时能实现铰接,而约束所有自由度时并不能实现刚性连接,而是介于铰接和刚接之间的一种绑定接触。(3)MPC算法能实现刚性连接与铰接,并且不需要网格对齐。
综上所述,简单的小模型可以采用耦合约束方程,而大的复杂模型推荐采MPC算法,采用接触单元的MPC算法在处理单元连接问题上可以取代耦合约束方程。
参考文献
[1]王勖成.有限单元法[M].北京:清华大学出版社,2003:378-418.
[2]王新敏.ANSYS工程结构数值分析[M].北京:人民交通出版社,2007:385-400.
[3]谢元丕,冯刚.ANSYS三维实体单元与板壳单元的组合建模研究[J].机械设计,2009,26(4):1-2.