基于太阳敏感器的移动式太阳跟踪控制系统研究
2017-05-02 06:30:41刘福才史顺东杨亦强任丽娜
电工电能新技术 2017年4期
刘福才, 史顺东, 王 浩, 杨亦强, 任丽娜
(1. 工业计算机控制工程河北省重点实验室, 燕山大学, 河北 秦皇岛 066004;2. 北京东方计量测试研究所, 北京 100086)
基于太阳敏感器的移动式太阳跟踪控制系统研究
刘福才1, 史顺东1, 王 浩1, 杨亦强2, 任丽娜1
(1. 工业计算机控制工程河北省重点实验室, 燕山大学, 河北 秦皇岛 066004;2. 北京东方计量测试研究所, 北京 100086)
针对移动设备太阳能供电需求问题,开展了高精度移动式太阳跟踪控制系统研究。采用一种新型的大视场、高精度太阳敏感器,基于双轴跟踪方式研制了移动式太阳跟踪装置;并针对移动平台不间断晃动、非直线行驶、转弯导致跟踪不稳、精度降低甚至跟踪目标丢失等问题,结合太阳敏感检测特点,提出了选择性位置式PID跟踪控制策略。对跟踪系统进行了车载试验,结果表明,相比于传统的四象限传感器跟踪,基于太阳敏感器的跟踪系统搜寻视野达120°,精度达±0.5°,具有响应速度快、跟踪精度高、稳定性好、目标丢失后找回快等优点。本文为移动式太阳跟踪提供了一种可靠可行的新方案,该方案稍加改进还可用于高空太阳电池标定等领域。
移动平台; 太阳跟踪; 太阳敏感器; 选择性PID; 动态跟踪性能
1 引言
在化石燃料日渐稀少的今天,太阳能作为一种可持续利用的清洁能源,应用前景日渐广泛。一些移动平台上也引入了太阳能供电装置,为系统辅助供电。移动式太阳跟踪系统与固定式太阳跟踪系统不同,平台移动过程中,跟踪环境复杂,这对太阳跟踪控制系统提出了新的要求。
国内外学者对太阳跟踪控制系统各自开展了大量研究,太阳跟踪方式主要有光电式、视日运动轨迹、光斑跟踪等方法[1]。J. H. Chen设计实现了基于FPGA的太阳跟踪系统,系统采集太阳电池电压、电流值,采用MTTP仿真跟踪太阳[2];P. Roth设计了一种通过闭环伺服系统自动操作的太阳跟踪控制系统,结合视日运动算法和四象限光电探测器跟踪太阳[3];雷元超对光伏电源最大功率点跟踪进行研究,提出改进爬山法的太阳电池最大功率点跟踪,系统在日照强度、环境温度及负载电阻大范围变化时仍能够快速、准确地跟踪太阳电池最大功率点,并具有较好的稳定性[4]。
文献[2-4]的研究主要是针对地面固定式太阳跟踪系统,但随着移动平台太阳能供电需求的提出,一些学者开展了移动式太阳跟踪系统的研究。A. Javadi设计了一种移动式光伏太阳能跟踪系统,并通过太阳能混合动力拖拉机对系统进行了试验验证,与水平固定模式相比该系统可多吸收30%的能量[5];徐从裕研究的车载式太阳自动跟踪方法,以太阳能输出电压和光敏管电平为跟踪参数,对给定目标采取实时调节策略,移动跟踪试验表明系统基本上实现了对太阳的动态跟踪[6]。
本文针对移动平台跟踪环境复杂性,开展了基于太阳敏感器的移动式太阳跟踪控制系统研究。系统基于双轴跟踪方式,采用太阳敏感器、嵌入式控制器及选择性位置式PID控制算法;并进行了车载试验,验证了系统动态跟踪性能的优越性。
2 移动式太阳跟踪控制系统组成
2.1 太阳跟踪控制系统设计
设计的移动式太阳跟踪控制系统主要由双轴式跟踪机械机构、太阳跟踪控制器、光电式太阳敏感器以及移动试验平台组成,移动式跟踪示意图如图1所示。其中机械结构俯仰转轴方向通过限位开关,可在0~90°间自由调节;方位转轴方向使用了滑环,可以实现360°大范围跟踪。太阳跟踪控制器通过读取太阳敏感器的太阳矢量夹角,经过计算处理,控制方位和俯仰电机及其执行机构,最终达到动态跟踪太阳的目的。

图1 移动式太阳跟踪控制系统图Fig.1 Portable solar tracking control system
控制系统结构如图2所示。太阳敏感器检测太阳矢量夹角,为控制电机跟踪太阳提供判断依据;水平、俯仰电机作为系统的执行机构,通过主控板给出的控制信号控制相应电机驱动器,驱动步进电机运行。

图2 太阳跟踪控制系统总体结构图Fig.2 General structure of solar tracking control system
2.2 太阳光跟踪传感器
太阳光跟踪传感器是一种感应太阳光线确定太阳位置的检测元件。目前,太阳光跟踪传感器种类繁多,根据原理不同,主要分为模拟式和数字式光传感器两种。其中模拟式光传感器有光电二极管传感器、硅电池传感器、PSD传感器和四象限传感器,数字式光传感器有CCD图像传感器和CMOS图像传感器。
(1) 四象限传感器检测原理
如图3所示,四象限传感器根据小孔成像原理,对太阳进行成像。成像光斑投射在四象限传感器上,光斑投射位置不同,A、B、C、D 4个象限光电流大小不同;将光电流转换成电压信号,输入控制器处理计算,驱动步进电机控制系统跟踪太阳。光束的质心(X,Y)可以由式(1)、式(2)计算[7]。经试验验证,设计的四象限传感器检测精度达1°,视野角达20°,较容易捕捉到太阳。
X=(UA+UB)-(UC+UD)
(1)
Y=(UB+UC)-(UA+UD)
(2)
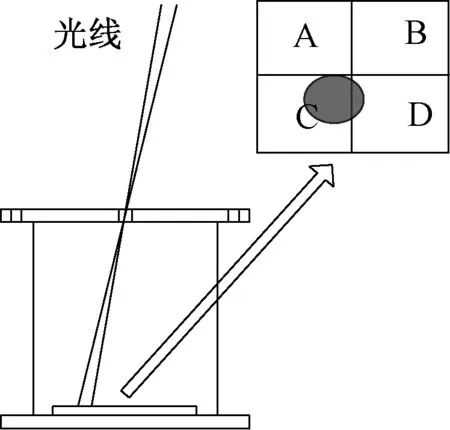
图3 四象限传感器检测原理图Fig.3 Detection principle of four quadrants sensors
(2) 太阳敏感器检测原理
太阳敏感器不仅可以测量微小卫星姿态,还可以用于太阳跟踪装置。太阳敏感器同样是运用光学小孔成像原理对太阳进行成像,使其成像光斑投射在CMOS图像传感器上,然后采用“质心法”求取太阳像光斑中心位置,并用最小二乘法对该太阳敏感器进行标定,测算出太阳入射角,其中成像小孔采用6×6小孔阵列[8]。
建立如图4所示的坐标系,测得的太阳矢量夹角在俯仰和方位两轴方向上入射角度分别为α、β。主控器根据实时获取的太阳矢量夹角,控制跟踪装置进行实时跟踪。
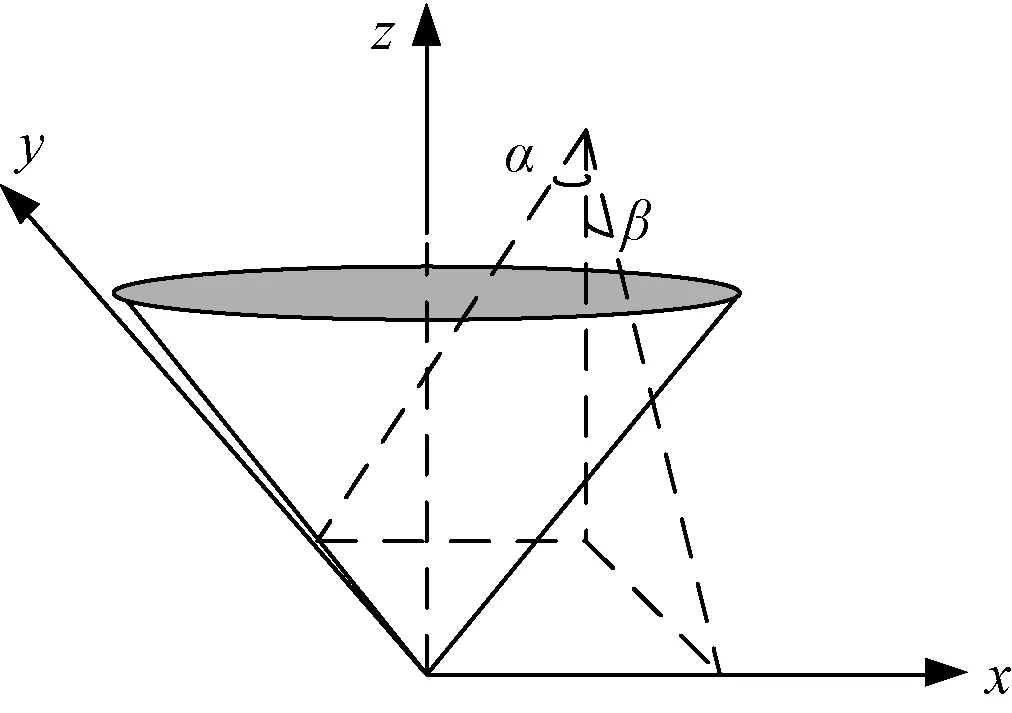
图4 太阳敏感器的太阳矢量角示意图Fig.4 Sun vector angle of sun sensors
光电二极管传感器跟踪范围大、控制简单,缺点是精度低、易受干扰;PSD和四象限传感器跟踪稳定性好、精度高、调节可靠,缺点是跟踪视角小、跟踪丢失后重新找回慢;CCD图像传感器灵敏度高、跟踪视野大,缺点是数据处理量大、编程繁琐。本文最终选用太阳敏感器检测移动式跟踪系统的对日定向偏角,其检测精度达0.05°,视野角达120°,数字通信接口帧频为10Hz。
3 太阳跟踪闭环控制策略
与传统的地面固定式跟踪系统不同,由于移动平台跟踪环境的复杂性,造成移动式太阳跟踪系统跟踪目标容易丢失、丢失后找回慢甚至不易找回、跟踪精度低、跟踪点附近易抖动等问题。针对移动式太阳跟踪系统的复杂性提出了太阳跟踪控制策略,主要包括跟踪系统控制策略、系统搜寻策略以及选择性位置式PID跟踪控制策略等。
3.1 系统控制策略
移动式太阳跟踪系统由于移动平台的运动,造成太阳电池板朝向不定,需要针对其特点研究跟踪控制策略,控制策略如图5所示。系统跟踪启动后,俯仰方向首先降到起始位置(初始俯仰角为根据当地经纬度和时间计算的太阳高度角α,如式(3)所示),采集太阳敏感器的太阳矢量夹角,处理、存储、判断后,执行跟踪或搜寻子程序。在系统运行过程中,若按下停止按键,则系统执行相关动作。
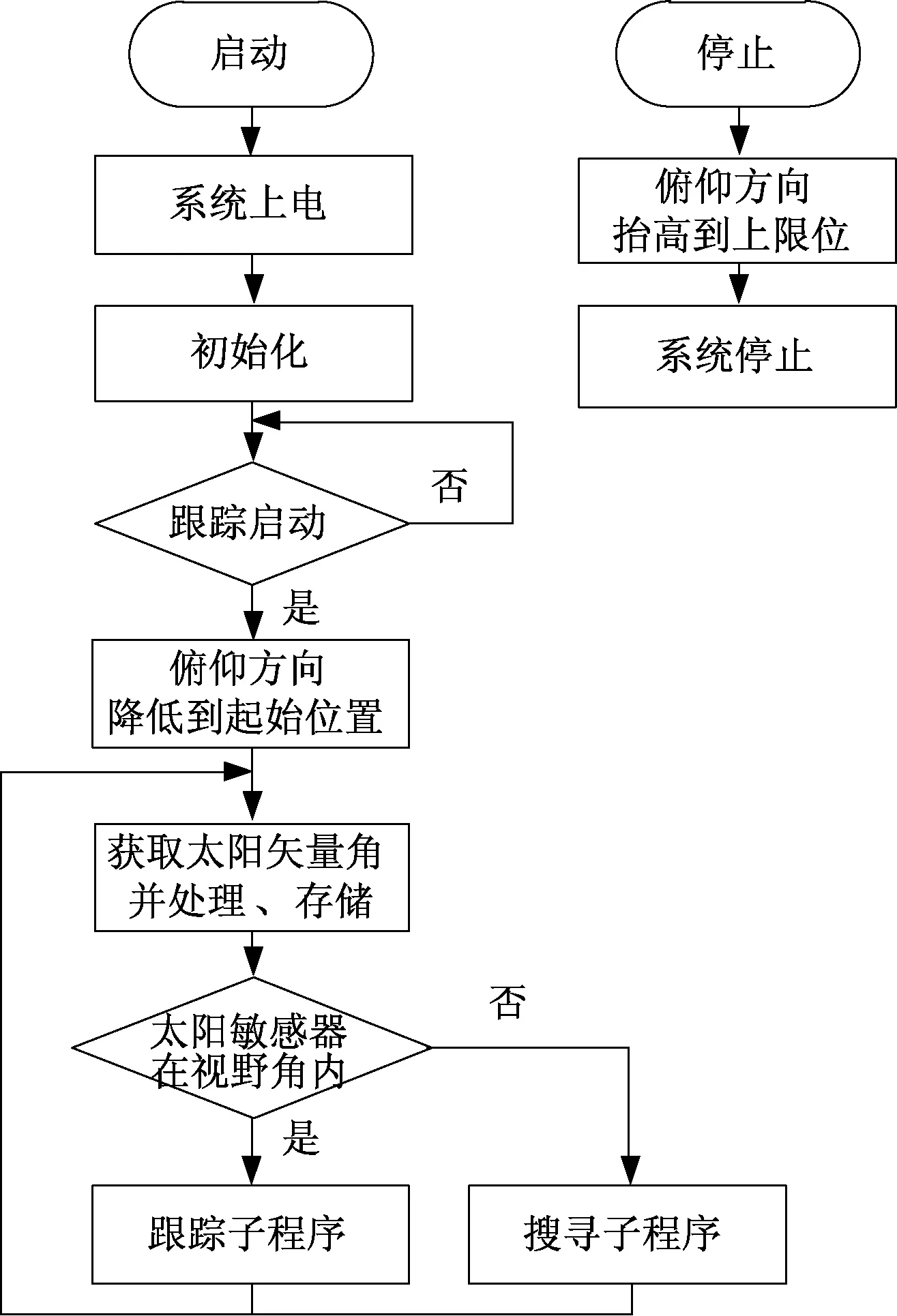
图5 跟踪系统控制策略Fig.5 Tracking system control strategy
太阳高度角α计算公式为[9]:
sinα=sinφsinδ+cosφcosδcosω
(3)
式中,δ为太阳赤纬角,即某天太阳直射点的纬度;ω为时角;φ为当地纬度。ω、σ计算公式为[9]:
σ=23.5°sin[360(284+n)/365]
(4)
ω=15°(12-h)
(5)
式中,n为积日,即一年中的天数,自1月1日起算;h为24小时制真太阳时,计算公式为:
h=hBJ+(γ-120)/15
(6)
式中,hBJ为北京时间;γ为当地经度。
3.2 系统搜寻策略
跟踪系统启动后,由于移动平台的运动,造成太阳电池板朝向不定,需要进行太阳方位搜寻。方位跟踪平台顺时针高速旋转搜寻,并随时检测判断太阳矢量夹角是否在传感器视野角之内,如是则切换到跟踪子程序,否则方位平台继续旋转搜寻;若方位平台旋转一周后仍未找到目标,则俯仰平台向上抬起一定角度后继续搜寻。系统搜寻策略如图6所示。

图6 搜寻子程序流程图Fig.6 Flow chart of search subroutine
3.3 选择性位置式PID跟踪控制策略
动态跟踪控制策略直接影响系统跟踪精度、跟踪稳定性和响应性能。施阁根据太阳能光伏输出特性,采用最小二分法实现最大功率点跟踪,提高了太阳能电池输出功率及太阳能利用率[10];徐从裕研究的车载太阳跟踪方法采取双跟踪PI控制算法,跟踪精度达5°;M. M. Sabir使用群体智能算法对PID控制器进行优化,提高了系统控制精度[11];刘景艳针对常规的PID控制太阳跟踪精度低、超调大等特点,提出了双模糊控制方案,提高了系统跟踪精度[12]。
移动平台不间断晃动,会对太阳跟踪系统水平和俯仰方向的跟踪造成干扰,极可能导致跟踪不稳;移动平台非直线行驶,会对系统跟踪造成较大干扰,不做处理甚至会导致跟踪精度严重降低;移动平台转弯,极可能导致跟踪目标丢失;跟踪控制策略设计时应对这些情况进行快速处理,提高系统的跟踪精准性、稳定性、实时响应性。此外,由于移动式跟踪环境的复杂性,难免会出现跟踪目标丢失的状况,这时要求跟踪系统具备快速自动找回太阳并继续跟踪的功能。
移动平台方位不定,系统跟踪启动后,极可能的情况是太阳能电池板定向对日偏差很大,传统的PID会造成积分累积,引起系统超调,针对系统此特点,设定阈值,选择性对积分累积;二维跟踪机构转动部分的转动惯性以及机构中存在的间隙,容易导致系统跟踪过程中出现延时滞后,并且处理不当容易造成系统在跟踪稳定点附近出现高频抖动,需要设定稳定精度范围阈值,使系统对日定向偏差小于稳定阈值。针对上述问题,提出选择性位置式PID跟踪控制策略,其控制系统框图如图7所示。
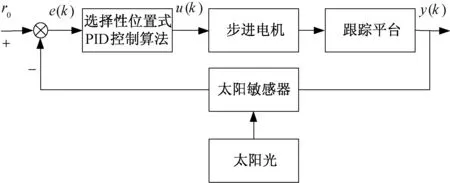
图7 太阳跟踪控制策略框图Fig.7 Control strategy of sun tracking
由于通过太阳敏感器获取的是太阳光线和太阳电池板法线的夹角,故令r0=0(r0为太阳电池板法线方向与太阳光线角度偏差值),即表示最终控制目标是太阳光线和太阳电池板垂直。太阳矢量夹角作为选择性位置式PID输入,控制跟踪装置动态跟踪太阳,跟踪框图如图8所示。
选择性位置式PID跟踪根据太阳敏感器定向对日夹角进行控制。从图8可以看出,当太阳位置在太阳敏感器视野角以外时,即定向对日夹角大于传感器视野夹角(|e(k)|>ε1),此时需要对太阳进行动态搜寻,其中e(k)为k时刻跟踪误差,ε1为太阳敏感器视野夹角阈值。

图8 选择性位置式PID跟踪框图Fig.8 Flow chart of selective position PID sun tracking
当太阳位置在太阳敏感器视野夹角以内时,系统采用选择性位置式PID策略控制,其中当定向对日夹角很大时,传统的PID会造成积分累积,引起系统超调,考虑当对日偏差在设定积分阈值以外时,将积分分离出去,即在太阳敏感器视野角内、偏差值较大时(ε2<|e(k)|<ε1,其中ε2为积分阈值),只采用PD调节,使系统有较快的响应,同时能够避免过大超调引起振荡,系统有较高的动态跟随性能。
当定向对日偏差小于积分阈值,且偏差角度在稳定区间外时(ε3≤|e(k)|≤ε2,其中ε3为稳定区间阈值),引入积分量,在系统有较快响应的基础上,避免了由于移动平台干扰造成的跟踪不稳、不准,保证了系统的跟踪精度。
当|e(k)|<ε3时,即偏差值很小时,认为系统完成了跟踪,为了避免移动平台晃动造成系统跟踪不稳,此时令u(k)=0(u(k)为k时刻控制值),步进电机静止,这样能有效避免振荡造成的跟踪不稳。
选择性位置式PID公式具体实现如式(7)所示:
(7)

偏差较大时采用PD调节,使系统快速响应的同时能避免过大超调引起振荡;偏差较小时采用PID控制,避免移动平台干扰造成跟踪不稳,保证系统控制精度;偏差在稳定精度内,令控制量为0,避免系统在跟踪稳定点附近高频振动、耗能且跟踪不稳。针对PD和PID控制分别选取合适的参数,以便能达到最好的跟踪效果。
为了更好地说明改进的选择性位置式PID更适用于移动式太阳跟踪系统,分别对传统PID和选择性PID策略进行了车载移动式太阳跟踪试验,移动式太阳跟踪曲线如图9所示。可以看出,采用传统PID策略跟踪时,系统超调大,系统动态跟踪对日偏差超出±1°,严重时甚至达到±2°,系统动态跟踪准确性不好,稳定性也不高;采用改进的选择性位置式PID控制策略跟踪时,系统跟踪曲线超调减小,动态跟踪对日偏差将能够保持在±0.5°以内,跟踪精度高、稳定性好,具有良好的动态跟踪性能。

图9 移动式太阳跟踪试验Fig.9 Moving solar tracking test
4 移动式跟踪试验及数据分析
系统调试完成后,需要进行车载试验,验证设计的基于太阳敏感器移动式太阳跟踪系统的动态跟踪性能。本节首先对基于太阳敏感器的跟踪系统进行车载试验,通过跟踪过程中太阳矢量夹角分析系统的跟踪状态和性能;然后对应用四象限传感器的跟踪系统进行车载试验,对比说明新设计的系统比采用四象限的系统更具优越性。
4.1 太阳敏感器车载试验及数据分析
2015年12月18日11∶40~12∶40进行了车载试验,平台移动速度为60~70km/h。系统将跟踪试验的太阳矢量角数据存储到SD卡中,图10为太阳敏感器跟踪状态曲线。

图10 太阳敏感器跟踪曲线Fig.10 Tracking curve with sun sensors
从图10(a)可以看出,t=0时刻系统启动跟踪,大约25s后系统捕捉到目标并进行实时动态跟踪;大约260s时刻系统跟踪目标丢失,并于15s内重新找回,考虑是由于90°拐弯时导致跟踪短暂丢失并快速找回;约545s时刻系统再次出现目标丢失,并于30s内重新找回,考虑是由于长达15s的建筑物遮挡造成跟踪丢失并重新搜寻找回。将图10(a)中100~160s区间放大,得到图10(b)。可以看出,系统对日定向偏差保持在±0.5°以内,系统跟踪精度满足动态跟踪要求。
4.2 四象限传感器车载试验及数据分析
2016年1月10日12∶00~13∶00对应用四象限传感器的跟踪装置进行车载试验,平台移动速度为60~70km/h。
通过光电状态检测传感器检测跟踪系统的跟踪性能。当太阳在跟踪精度(≤2°)范围时,光电状态检测传感器将输出0.4~0.6V电压,否则其输出电压为≤0.37V。通过数据采集器CR1000每隔1s采集1次传感器数据,图11为四象限传感器跟踪状态曲线。t=0时刻系统启动跟踪,大约40s后系统捕捉到目标并动态跟踪;约285s时刻系统出现目标丢失,并于40s内重新找回,考虑是由于90°拐弯或者建筑区遮挡时导致跟踪目标丢失并搜寻找回;约560s时刻系统再次出现跟踪丢失,并于40s内重新找回,考虑是由于长达15s的建筑物遮挡造成跟踪丢失并重新搜寻找回。从图11中只能断定系统完成跟踪时,对日定向偏差保持在小于2°范围内。

图11 四象限传感器跟踪曲线Fig.11 Tracking curve with four-quadrant photodiode
对比太阳敏感器跟踪试验和四象限传感器跟踪试验可知,由于太阳敏感器视野角大、检测精度高,使用太阳敏感器进行太阳跟踪具有动态跟踪快速性好、跟踪精度高、跟踪稳定性好的优点,并且当系统在丢失目标时能够快速找回。
5 结论
(1) 为了最大限度地提升移动平台太阳光伏电池的光量有效利用率,针对移动平台环境复杂性,设计了一款基于太阳敏感器的移动式太阳跟踪控制系统。系统通过太阳敏感器获取太阳矢量夹角,采用了选择性位置式PID闭环控制策略,驱动步进电机,控制双轴式装置跟踪太阳。
(2) 对设计的移动式跟踪系统进行了车载测试试验。试验数据分析表明,利用太阳敏感器进行跟踪,搜寻视野达120°,精度达±0.5°。对比四象限传感器车载跟踪试验可知,使用太阳敏感器进行太阳跟踪,具有响应速度快、跟踪精度高、稳定性好、目标丢失后找回快等优点。为移动式太阳跟踪控制系统提供了一种新方案,该方案稍加改进还可用于高空太阳能电池标定及飞机、渔船、游艇等移动平台的太阳能供电装置中,提升系统的太阳能有效利用率。
[1] 马帅旗 (Ma Shuaiqi). 高精度太阳方位跟踪系统设计与实现 (Design and implementation of high precision solar azimuth tracking system) [J]. 计算机与应用化学 (Computers and Applied Chemistry), 2014, 31(10): 1257-1261.
[2] J H Chen, H T Yau, T H Hung. Design and implementation of FPGA-based Taguchi-chaos-PSO sun tracking systems[J]. Mechatronics, 2015, 25: 55-64.
[3] P Roth, A Georgiev, H Boudinov. Design and construction of a system for sun-tracking[J]. Renewable energy, 2011, 29(3): 393-402.
[4] 雷元超, 陈春根, 沈骏, 等 (Lei Yuanchao, Chen Chungen, Shen Jun, et al.). 光伏电源最大功率点跟踪控制方法研究 (Research on control method of maximum power point tracking for photovoltaic power system) [J]. 电工电能新技术 (Advanced Technology of Electrical Engineering and Energy), 2004, 23(3): 76-80.
[5] H Mousazadeh, A Keyhani, A Javadi, et al. Design, construction and evaluation of a sun-tracking system on a mobile structure[J]. Journal of Solar Energy Engineering, 2011, 133(1): 1-6.
[6] 徐从裕, 史莅全 (Xu Congyu, Shi Liquan). 基于太阳能输出电压的跟踪方法研究 (Study on tracking method based on output voltage of solar cell) [J]. 电子测量技术 (Electronic Measurement Technology), 2012, 35(6): 73-76.
[7] 冯静, 张龙, 刘先立 (Feng Jing, Zhang Long, Liu Xianli). 四象限太阳跟踪传感器的设计 (Design of four quadrant solar tracking sensor) [J]. 能源研究与利用 (Energy Research & Utilization), 2010,(4): 12-15.
[8] 樊巧云, 江洁, 张广军 (Fan Qiaoyun, Jiang Jie, Zhang Guangjun). 小型 CMOS 太阳敏感器 (Micro CMOS sun sensor) [J]. 光电工程 (Opto-Electronic Engineering), 2007, 34(2): 133-136.
[9] 向平, 毕玉庆, 程建民, 等 (Xiang Ping, Bi Yuqing, Cheng Jianmin, et al.). 基于 ARM 的太阳跟踪控制系统设计 (Design of a sun-tracking system based on ARM) [J]. 计算机测量与控制 (Computer Measurement & Control), 2009 (6): 1102-1105.
[10] 施阁, 胡敬敏, 楼洪, 等(Shi Ge, Hu Jingmin, Lou Hong, et al.). 太阳能最大功率点跟踪的航模电调设计 (Design of an electronic speed controller for solar maximum power point tracking) [J]. 中国计量学院学报 (Journal of China University of Metrology), 2013, 24(2): 151-155.
[11] M M Sabir, T Ali. Optimal PID controller design through swarm intelligence algorithms for sun tracking system[J]. Applied Mathematics and Computation, 2016, 274: 690-699.
[12] 刘景艳, 李玉东, 杨晓邦 (Liu Jingyan, Li Yudong, Yang Xiaobang). 基于 ARM 的太阳自动跟踪双模糊控制系统 (Solar automatic tracking double fuzzy control system based on ARM) [J]. 计算机测量与控制(Computer Measurement & Control), 2012, 20(8): 2139-2142.
Control technology of portable solar tracking based on sun sensor
LIU Fu-cai1,SHI Shun-dong1,WANG Hao1,YANG Yi-qiang2,REN Li-na1
(1. Key Laboratory of Industrial Computer Control Engineering of Hebei Province, Yanshan University, Qinhuangdao 066004, China; 2. Beijing Orient Institute for Measurement & Test, Beijing 100086, China)
Aiming at the solar power demand of mobile devices, a high precision portable solar tracking control system is studied. A new type of sun sensors with wide field and high accuracy is chosen, and a portable solar tracking device was developed based on two-axis tracking. In view of the difficulties in tracking practice of the mobile platform, such as continuous vibration, non-straight driving even turning direction, the problems of tracking target missing will arise. In the paper, the selective PID tracking control strategy combining with the test characteristics of the sun sensor is proposed. Vehicle tests of the tracking system have been carried out, and the results show that the tracking system based on sun sensors has a range search view up to 120°, and the precision of ±0.5°, and has the advantages of fast response speed, high tracking precision, good stability and fast recovery after a target is lost, as compared to the four quadrants sensor tracking system. This paper provides a reliable and feasible new scheme for portable solar tracking control system, and the scheme with a little improvement can also be used in the area of high-altitude solar cell calibration.
mobile platform; sun tracking; sun sensor; selective PID; dynamic tracking performance
2016-06-01
国家高技术研究发展计划(863计划)项目(2011AA)、 国家自然科学基金项目(60134025)、 河北省自然科学基金项目(2015203362)
刘福才(1966-), 男, 黑龙江籍, 教授, 博士, 研究方向为太阳能系统计算机控制、模糊系统辨识与预测控制; 史顺东(1989-), 男, 河北籍, 硕士研究生, 研究方向为太阳能系统计算机控制。
TP273.5
A
1003-3076(2017)04-0076-07
猜你喜欢
中学生数理化·高一版(2022年3期)2022-04-05 08:17:14
中学生数理化·七年级数学人教版(2020年12期)2021-01-18 06:57:42
语数外学习·高中版上旬(2020年8期)2020-09-10 07:22:44
西南石油大学学报(自然科学版)(2018年4期)2018-08-02 05:42:38
电子测试(2018年11期)2018-06-26 05:56:04
中学生数理化·七年级数学人教版(2017年4期)2017-07-08 11:48:34
广西电力(2016年5期)2016-07-10 09:16:44
肿瘤预防与治疗(2015年1期)2015-09-26 07:26:23
中学生数理化·七年级数学人教版(2015年3期)2015-05-30 10:48:04
水电站机电技术(2014年1期)2014-09-26 11:59:53