
基于电磁耦合器调速的同步发电机控制研究
2017-05-02 07:35包广清郭风堂
微特电机 2017年5期
包广清,郭风堂
(兰州理工大学,兰州 730050)
0 引 言
目前,风电场运行的变速恒频风电机组主要有双馈异步型和永磁直驱型2种。这2种风电机组都通过变流器与电网连接,其暂态过载能力、对电网电压的支撑能力和频率稳定的能力相对较弱,且输出电压波形畸变,电能质量差。由于风电机组装机规模不断增长,解决上述2种常规风电机组存在的这些问题,变得尤为重要。前端调速型的同步风力发电技术受到国内外研究人员的关注。欧洲推出了液力变距调速的风电机组[1],液力变矩器与同步发电机相连,将齿轮传递的转速调节为同步转速。清华大学柴建云、陈基和等人则开发了基于电磁耦合器调速的新型同步风电机组[2-3]。电磁耦合器调速型的风电机组采用的是与火电和水电相似的发电机并网原理,即风力机的调速装置位于同步发电机前端,同步发电机定子侧与电网直接相连,调速装置负责将发电机转速调节为同步转速,其结构如图1所示。电磁耦合器的传动是一种非接触的柔性传动方式,可实现风电机组的无级调速,提高了机组的变速范围和控制响应速度;实现了能量的平稳传递,避免了电网故障时发电机产生的冲击转矩对齿轮箱的损伤。电磁耦合器所用的变频器功率容量小,控制简单。文献[4-5]通过HAWC2和MATLAB的联合仿真,研究了2 MW电磁耦合器调速风电机组的故障穿越能力和频率支持能力,并取得了满意的效果。文献[6]推导了电磁耦合器的等效电路,分析了电磁耦合器的能量关系。

图1 前端调速型同步风电机组原理图
作为一种新型的前端调速风电机组,关于该风电机组风能追踪的研究尚处于起步阶段。研究该风电机组的风能追踪特性可以充分地利用风力资源,获得更高产业效益,推进该类型风电机组的实用化和产业化。
目前风能跟踪的控制方法主要有叶尖速比法、功率信号反馈法和爬山搜索法[7-8]。叶尖速比法控制简单,响应速度快,但需要实时地进行风速测量。爬山搜索法不需要风力机参数,但是由于风机惯性的存在,使其只适用于小容量系统。功率信号反馈法不需要测量风速,实现该方法的难点在于最优功率曲线难以获得。
本文以电磁耦合器调速的同步风电机组为研究对象,在分析了风力机运行特性和电磁耦合器的工作原理的基础上,采用最优转矩和转速闭环的控制方法,研究了额定风速以下时,阶跃和随机风况下电磁耦合器的调速特性和风电机组的风能捕获特性,实现了不同风速下风电机组的稳定运行和风能有效追踪。
1 风力发电机组模型
基于电磁耦合器调速的风电机组主要由风力机、电磁耦合器和同步发电机等组成,如图2所示。其中前轴系包括风力机、变速齿轮箱和电磁耦合器的内转子;后轴系包括同步发电机和电磁耦合器的外转子。

图2 电磁耦合器调速型风电机组结构示意图
1.1 风力机的运行特性
根据风力机的空气动力学贝茨理论可知[9],在一定风速下,风力机捕获的风能功率函数:
(1)
风能利用系数CP(λ,β)的特性曲线,如图3所示。当桨距角一定时,仅存在一个最佳叶尖速比λopt,使得CP值最大,此时风力机捕获的风能最多。

图3 风能利用系数CP(λ,β)的特性曲线
基于电磁耦合器调速的风力机的运行工况分为3种:最大风能跟踪区、恒转速区和恒功率区,如图4所示。
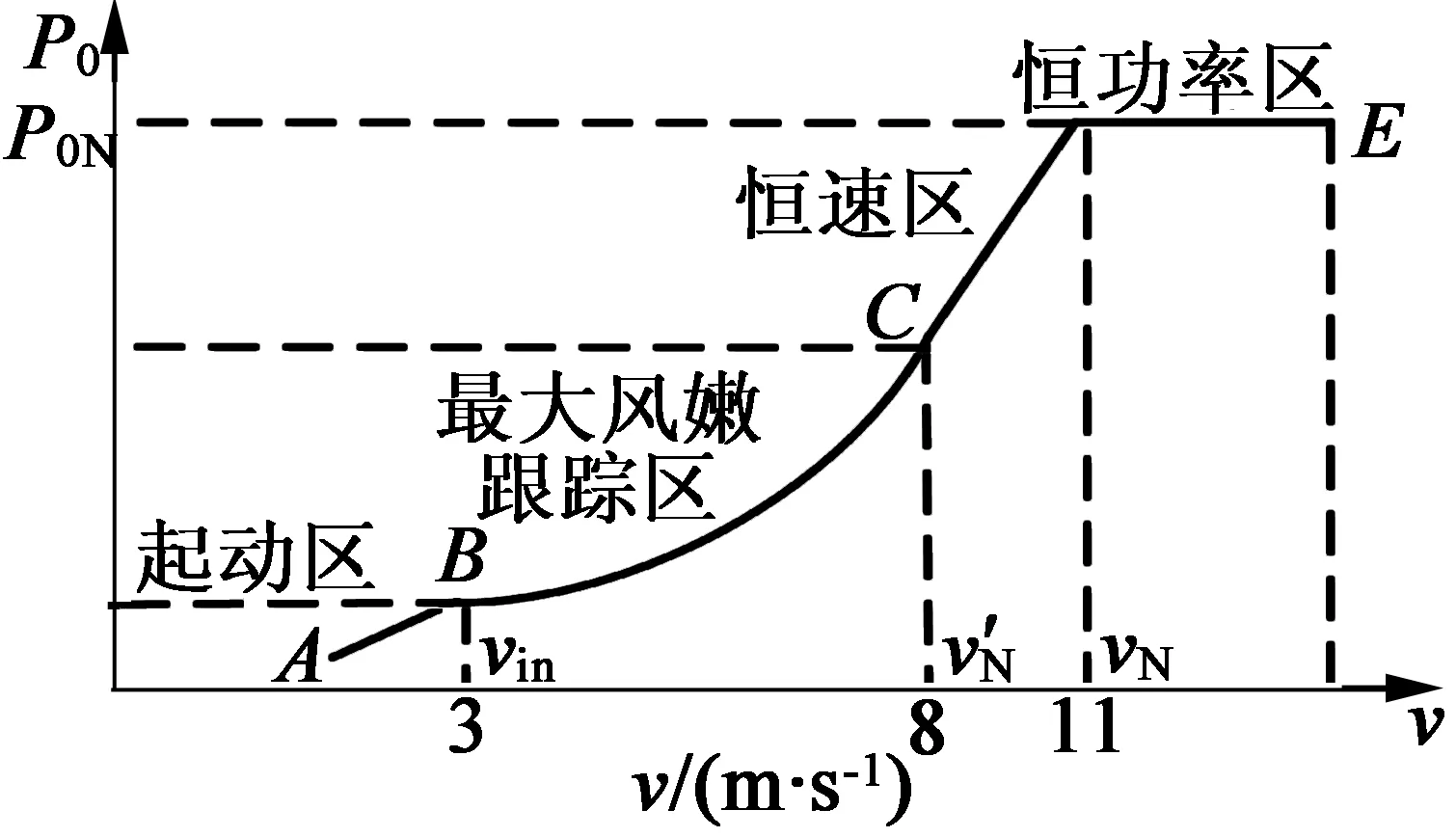
图4 不同区域内风力机输出功率与风速的关系
1.1.1 最大风能跟踪区
在此区间,风速和风力机转速均低于额定值,β=0°。CP只与叶尖速比λ相关,在风速改变的同时调节风力机转速,使之始终对应于最佳叶尖速比λopt,保持风能系数为CPmax。风力机的输出转矩与风轮转速的关系:
(3)
式中:
(4)
1.1.2 恒转速区
在此区间,风力机和电磁耦合器均处于额定运行状态,但风速低于额定风速vN。采用转速闭环控制,使电磁耦合器内外转子转速差为额定值。风力机的输出转矩:
(5)
1.1.3 恒功率区
在此区间,风速超过额定风速vN,变桨机构工作,通过改变桨距角β的大小,使风力机的输出功率稳定在额定功率。此时,电磁耦合器的所需调节的转速差要小于额定值。风力机的输出转矩:
(6)
1.2 电磁耦合器模型
电磁耦合器由内、外2个转子组成,其结构如图5所示。鼠笼式内转子与齿轮箱相连,由变频器供电的外转子为通电电枢,与同步发电机相连。机组并网后,电磁耦合器的外转子转速与同步发电机转速保持一致,被电网频率锁定为一稳定值。通过变频器可以调节电磁耦合器内外转子的转速差,改变内转子转速,实现最佳叶尖速比运行。
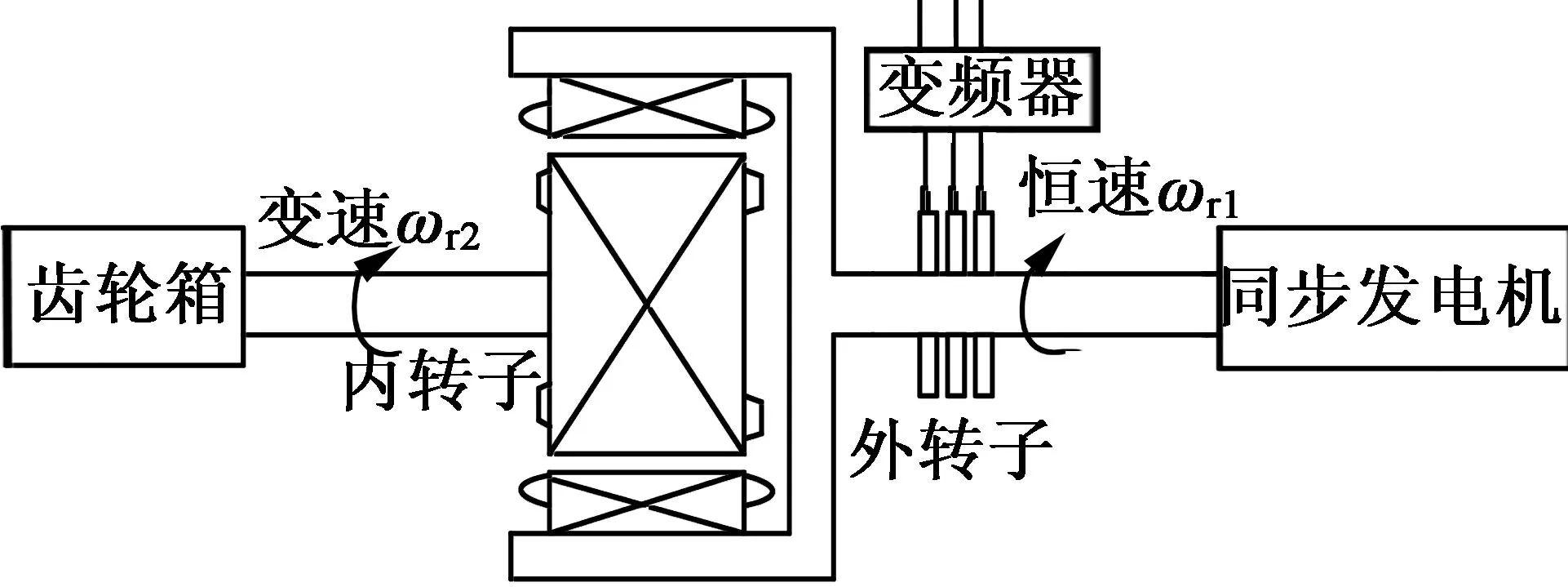
图5 电磁耦合器的结构示意图
电磁耦合器在m-t坐标系下的状态方程[10]:
(7)
转差角频率:
(8)
电磁转矩:
(9)
2 最优转矩的控制策略
风力机的最优机械特性曲线如图6所示。通过最优转矩给定的控制方法能够实现风力机在额定风速以下的最佳功率运行[11-12]。
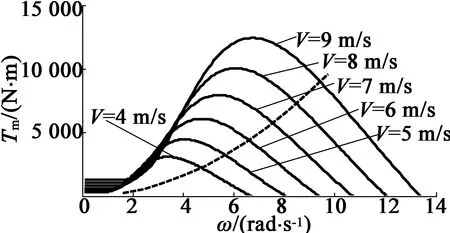
图6 风力机最优机械特性曲线

在最大风能追踪区电磁耦合器的内外转速差Δω会超过额定值Δωn,因此需采用弱磁控制实现转速调节。本文采用传统的弱磁控制方法,即当转速差Δω超过额定转速差Δωn时,转子磁链与转速成反比:
(10)

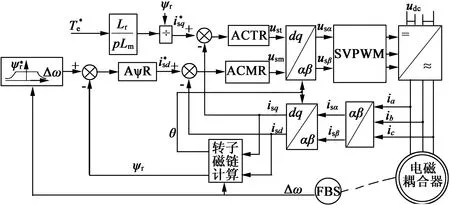
图7 转子磁场定向的电磁耦合器控制结构图

3 系统仿真研究
本文采用MATLAB/Simulink仿真软件对不同风况下电磁耦合器调速同步风电机组的风能跟踪控制进行仿真研究。
仿真所用风力机的主要参数:PN=100 kW,vN=11 m/s,R=10 m,ωmN=60 r/min,风速范围为3~25 m/s,齿轮箱变比为22。电磁耦合器的参数:额定功率为15 kW,额定线电压400 V,额定频率18 Hz,外转子漏感Ls1=1.04 mH和电阻r1=0.045 Ω,内转子漏感Ls2=1.623 mH和电阻r2=0.058Ω,互感Lm=50.1 mH,极对数p=6。λopt=8.1,CPmax=0.48。同步发电机的主要参数:Pn=110 kW,额定线电压UN=380 V,同步转速n=1 500 r/min ,额定功率因数为0.85。
3.1 风能利用系数和输出功率的变化
如图8所示,风速在t=0~1 s时为4 m/s,t=1~8 s时风速从4 m/s逐渐上升至11 m/s,t=8~11 s时风速为11 m/s。从图8(c)中可以看出,在最大风能跟踪区风能利用系数CP=0.48,实现了最大风能跟踪的目标;风速为8~11 m/s时风能利用系数CP逐渐减小,但风力机的输出功率持续增加,风力机进入恒转速运行区。
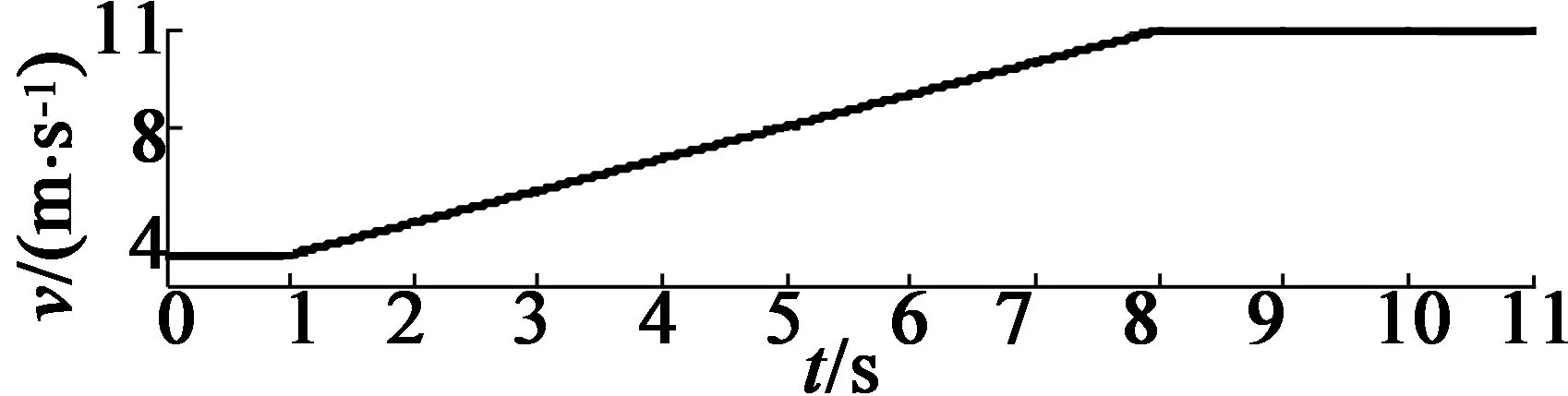
(a) 风速变化曲线

(b) 风力机输出功率
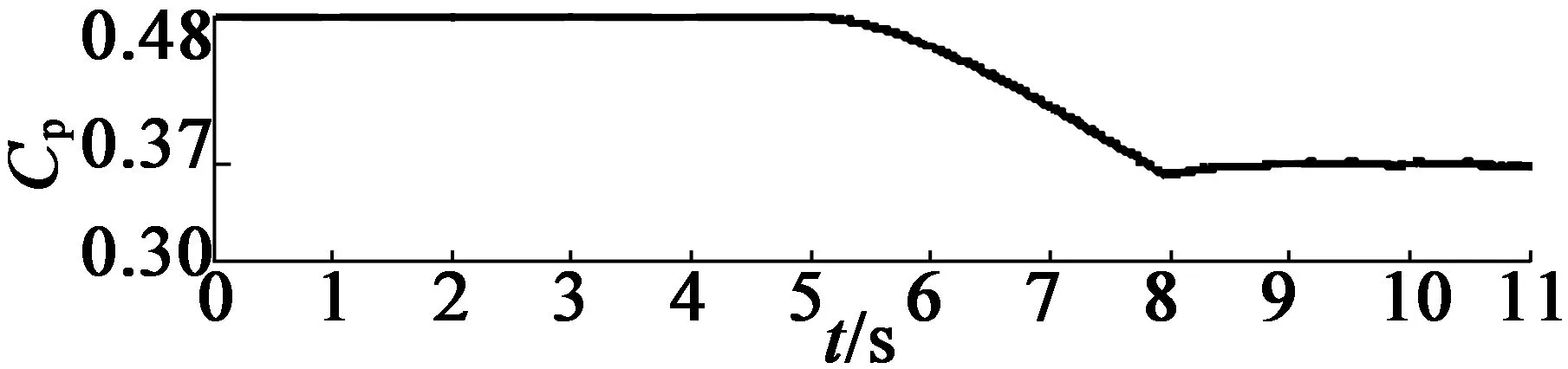
(c) 风能利用系数
3.2 阶跃风速下的仿真分析
最大风能跟踪区阶跃风速下风电机组各部分的仿真波形如图9~图11所示。由图可见,在风速急剧增大和减小时,风力机输出功率和转矩随之快速变化,前轴转速即内转子转速,快速地跟踪风速的变化以保持最大风能捕获的运行状态;风能利用系数CP曲线发生较小波动后能较快地恢复到稳定值0.48,实现了最大风能跟踪的目的。在此过程中,电磁耦合器外转子转速即后轴转速始终稳定在1 500 r/min,保证了同步发电机输出电压、电流频率的稳定性。从图中还可看出,风速稳定时同步发电机输出的有功功率要高于风力机的输出功率,说明同步发电机输出的有功功率分别来自于风力机输出的机械功率和电磁耦合器的电功率,即电磁耦合器在调节转速差,传递转矩的同时还能够补偿风力机和同步发电机之间的功率差值。
(a) 阶跃风速

(b) 风力机的输出功率

(c) 风力机经齿轮箱输出的转矩
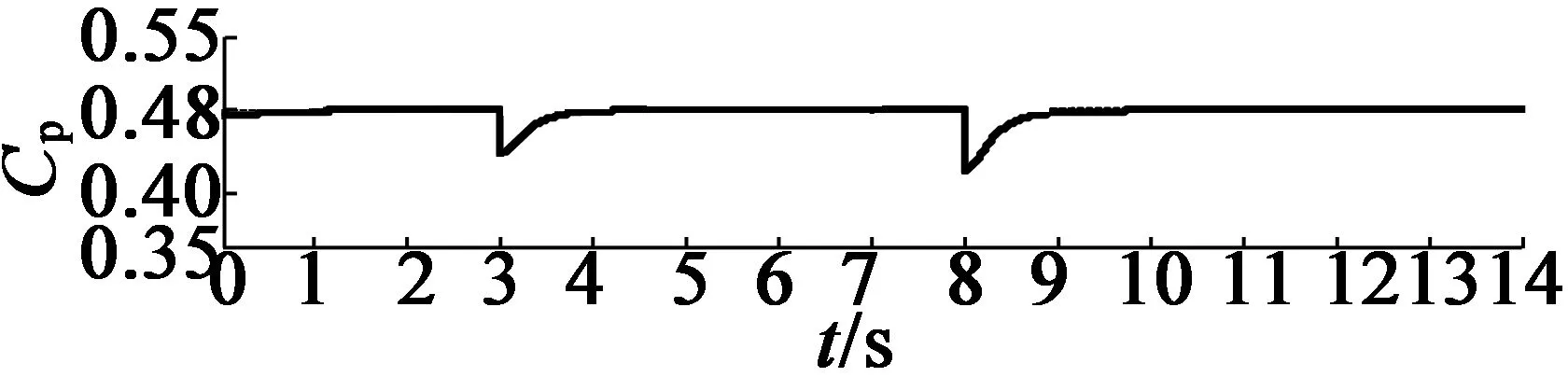
(d) 风能利用系数

(a) 外转子转速
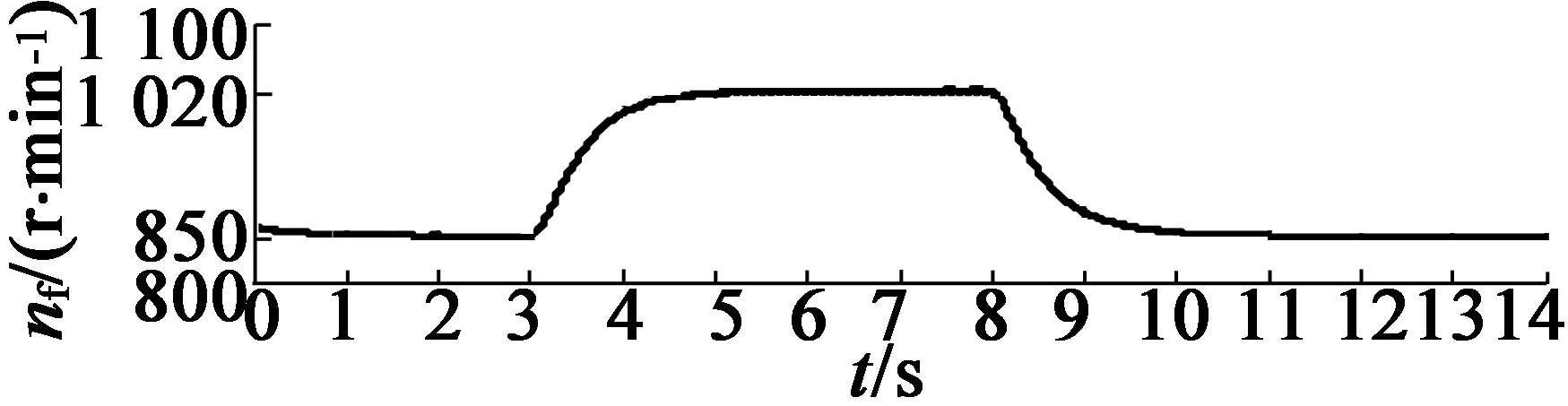
(b) 内转子转速
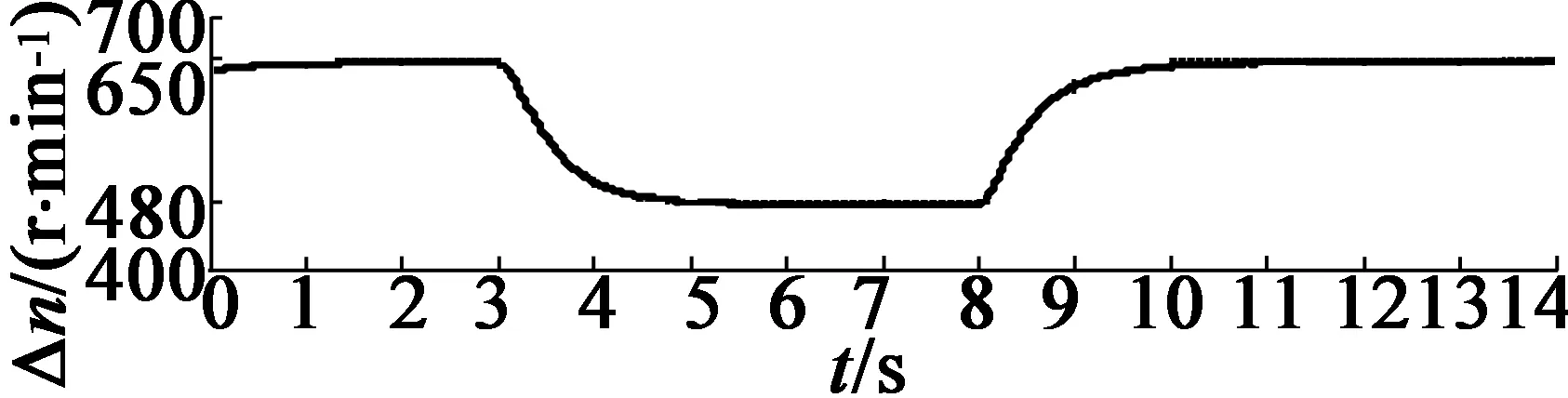
(c) 内外转子转速差
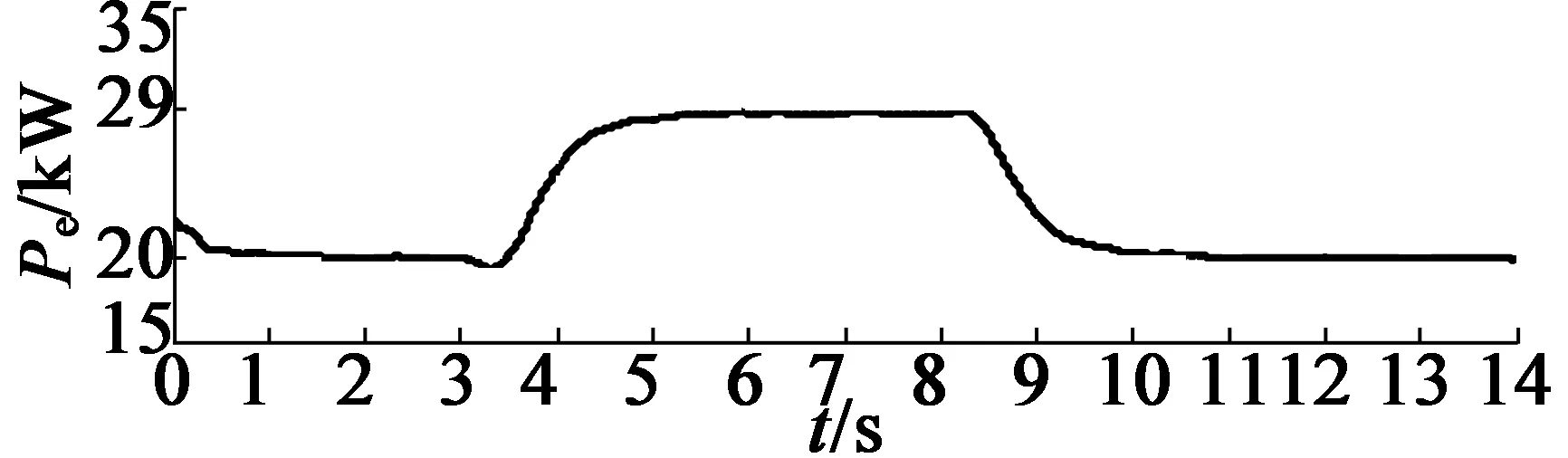
(a) 同步发电机输出的有功功率

(b) 同步发电机输出的三相电流
3.3 运行工况改变时的仿真分析
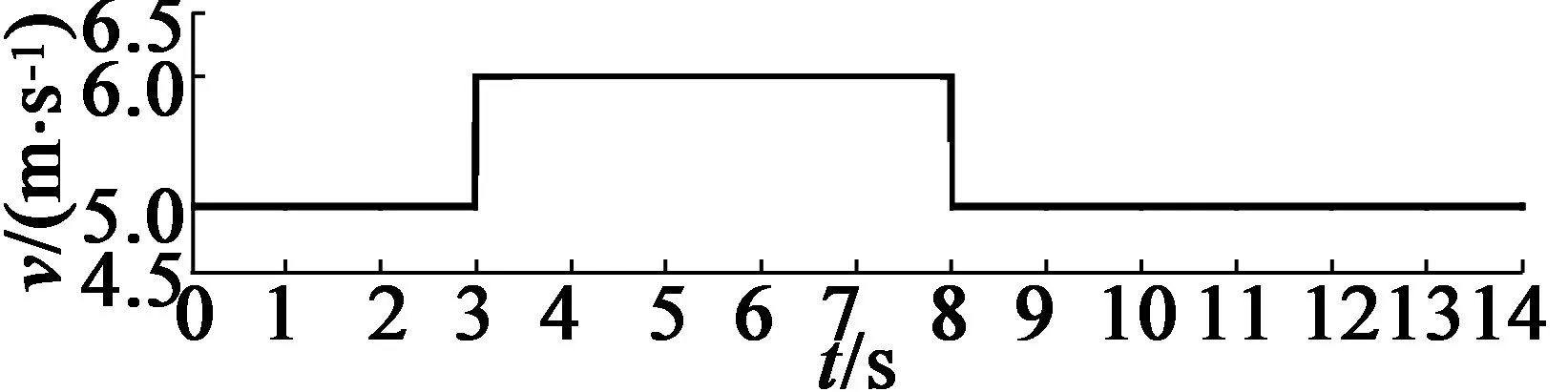
风速由7 m/s到9 m/s再到11 m/s时,风力机从最大风能追踪区进入到恒转速区,仿真波形如图12~图14所示。当风速变化使得风力机的运行区域发生变化时,电磁耦合器内转子转速快速地跟踪风速的变化,外转子转速虽然发生轻微波动,但仍稳定在1 500 r/min,使转矩控制和转速闭环控制之间平稳过渡。风力机进入到恒转速运行区后,转速差为额定值150 r/min,内转子转速稳定在1 350 r/min。在恒转速区,风速发生阶跃变化时,电磁耦合器的内、外转子转速都保持在额定值。风速增加时,CP值减小,但风力机的输出功率和转矩增加。
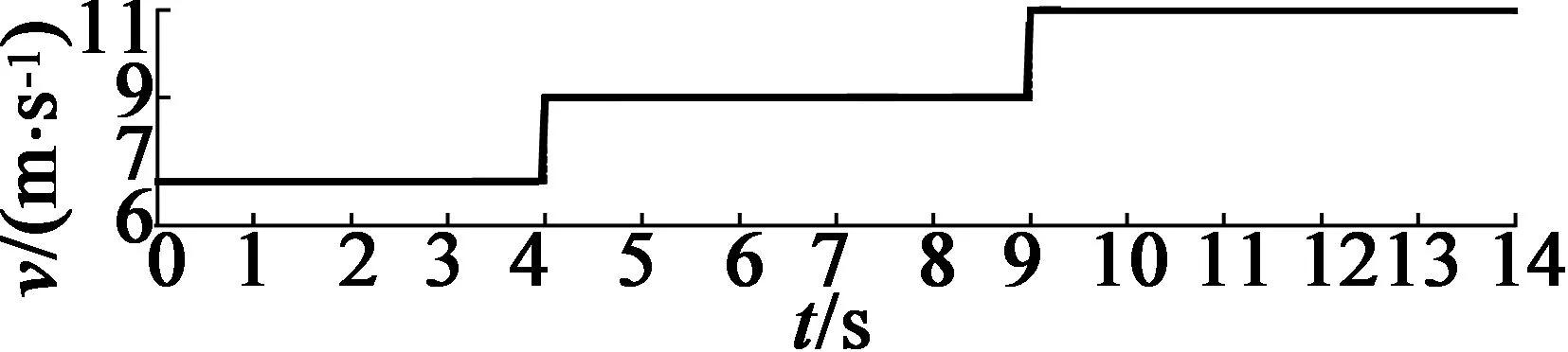
(a) 阶跃风速

(b) 风力机的输出功率
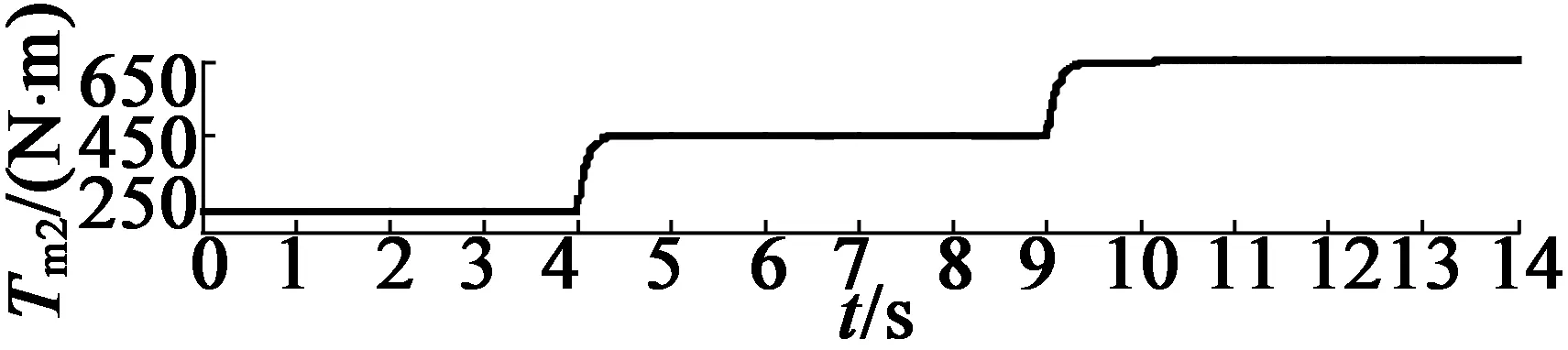
(c) 风力机经齿轮箱输出的转矩

(d) 风能利用系数

(a) 外转子转速

(b) 内转子转速
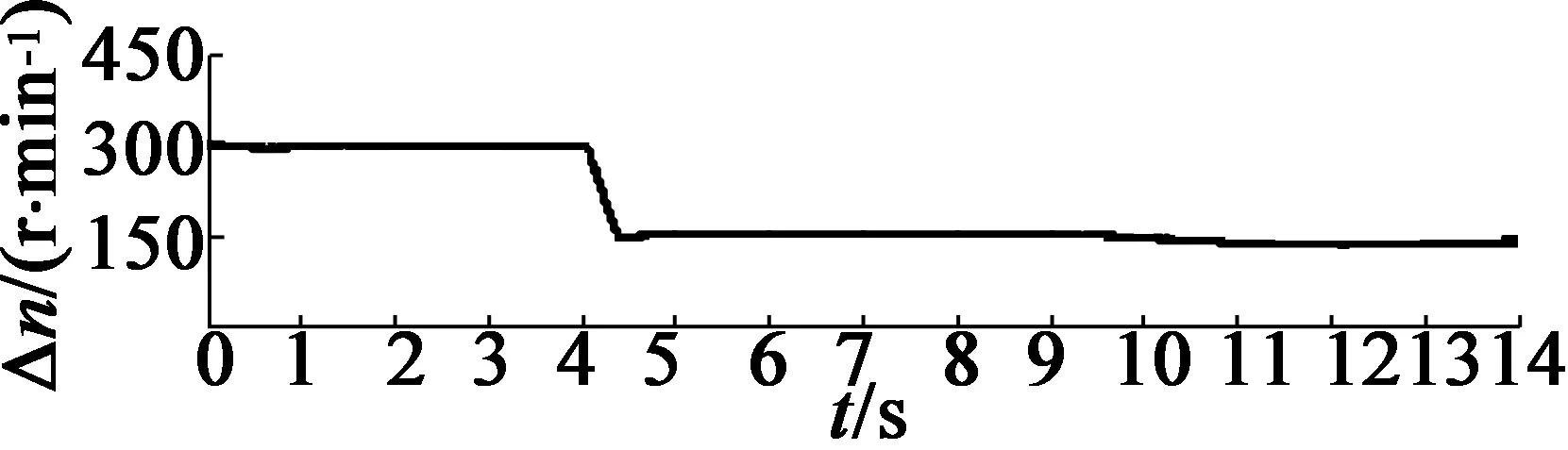
(c) 内外转子转速差
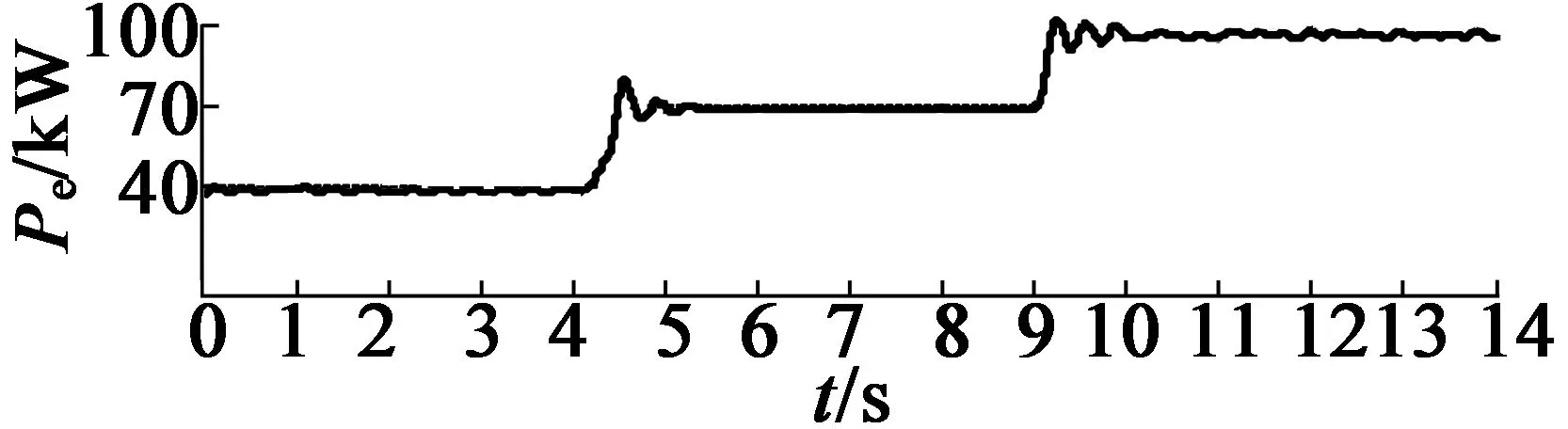
(a) 同步发电机输出的有功功率
(b) 同步发电机输出的三相电流
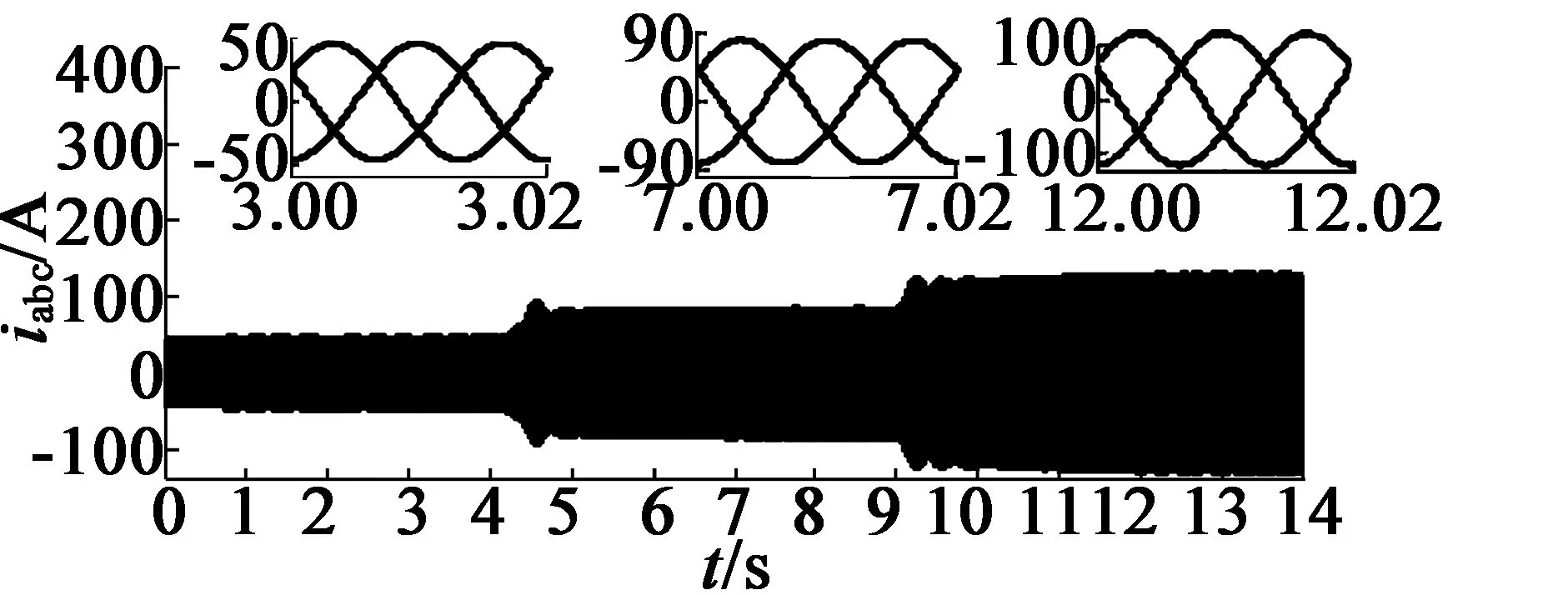
3.4 随机风速下的仿真分析
随机风速下仿真波形如图15~图17。随机风速采用丹麦奥尔堡大学开发的风速仿真模型[13]。由图可见,t=0~6 s,风速低于8 m/s,风力机处于最大风能跟踪区,其输出的功率、转矩以及前轴转速均能够快速地跟随风速的变化,使风力机保持最佳叶尖速比的运行状态。此时风能利用系数稳定在0.48附近,实现了最大风能跟踪的目标。t=6~14s时,风速高于8 m/s,风力机处于恒转速区,CP值始终低于0.48,电磁耦合器内转子的转速稳定在额定值。整个过程中后轴转速稳定在1 500 r/min,保证了同步发电机输出电压、电流频率的稳定。

(a) 随机风速
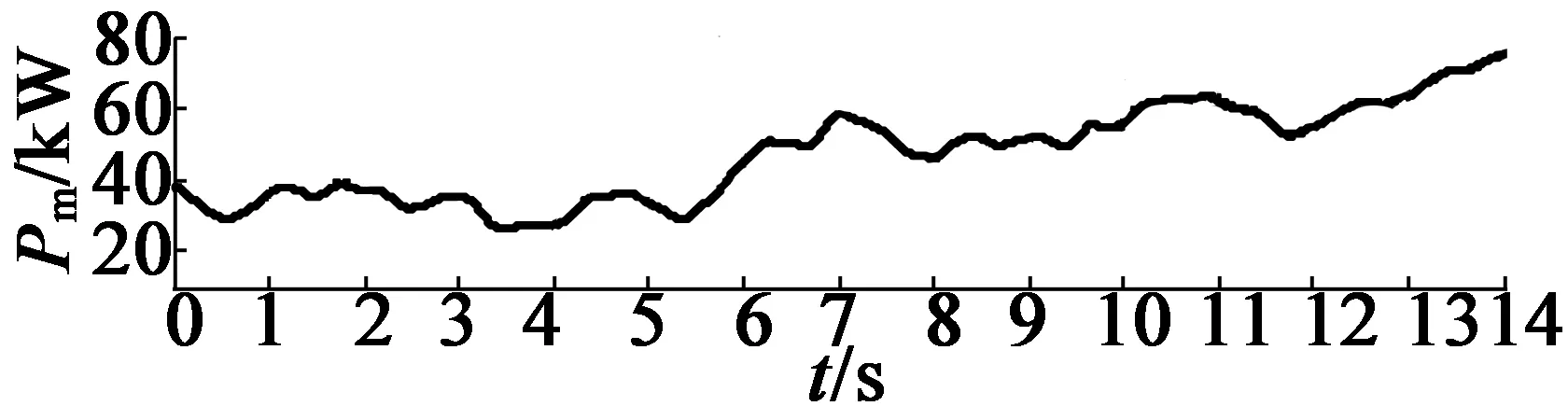
(b) 风力机的输出功率

(c) 风力机经齿轮箱输出的转矩

(d) 风能利用系数
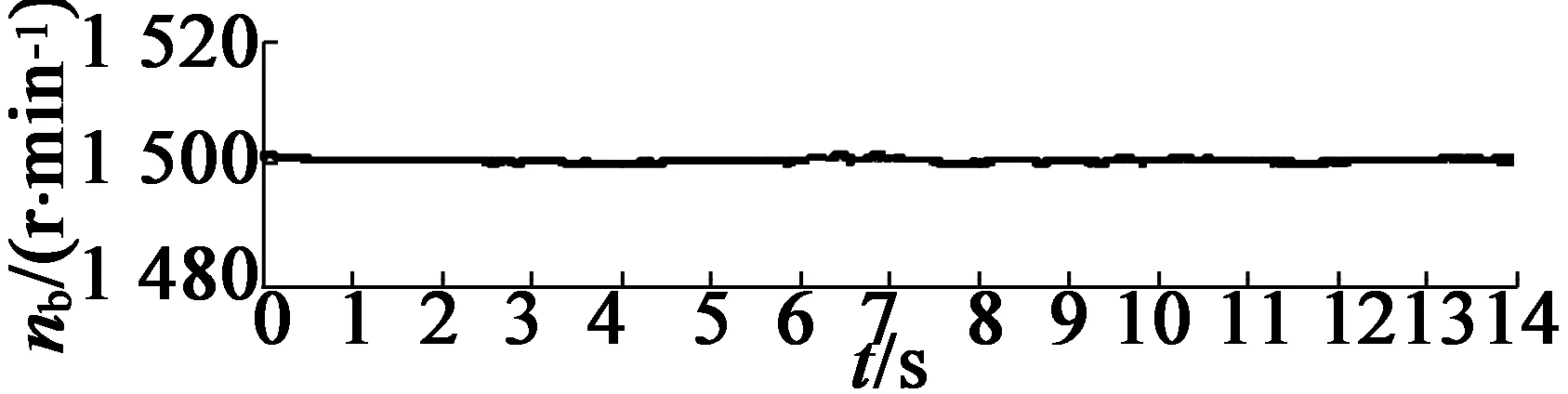
(a) 外转子转速

(b) 内转子转速

(c) 内外转子转速差
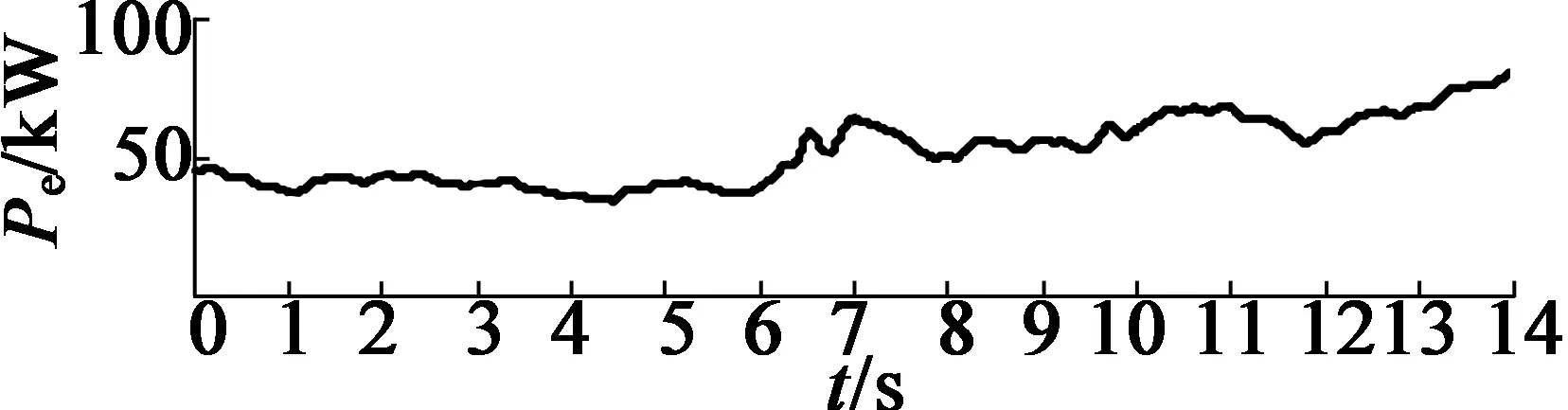
(a) 同步发电机输出的有功功率
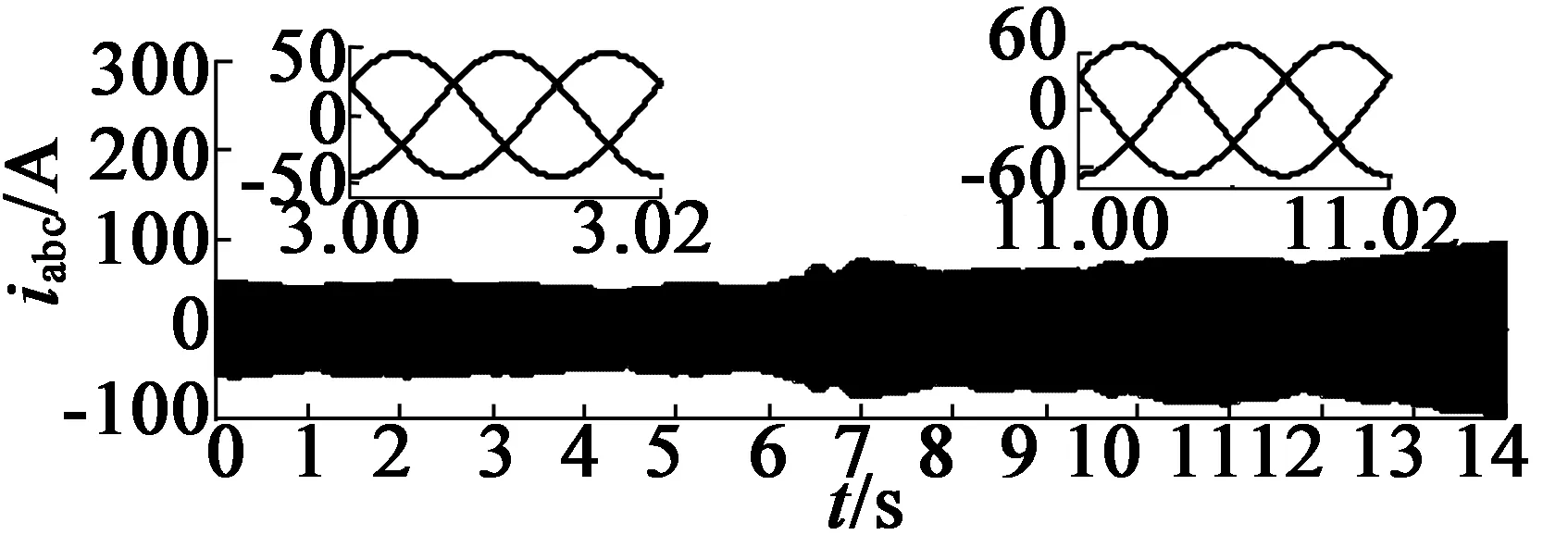
(b) 同步发电机输出的三相电流
4 结 语
本文在分析了风力机运行特性和电磁耦合器工作原理的基础上,根据电磁耦合器的转矩传递特性,采用最优转矩和转速闭环的控制策略,应用MATLAB/Simulink仿真软件搭建了电磁耦合器调速同步风电机组风能跟踪控制的仿真模型。在不同风况下的仿真结果表明,采用最优转矩和转速闭环控制的电磁耦合器调速同步风电机组,其运行稳定,功率、转矩的波动小,能够较好地达到最大风能跟踪的目的,在风能跟踪区和恒转速区之间平滑地过渡切换。
[1] ERLICH I,BACHMANN U.Grid code requirements concerning connection and operation of wind turbines in Germany [C]//Proceedings of IEEE Power Engineering Society General Meeting.San Francisco,CA,USA,2005:2230-2234.
[2] 陈基和,周强明,柴建云,等.基于电磁耦合器调速的新变速恒频风力发电机组[J].清华大学学报:自然科学版,2011(3):361-366.
[3] 由蕤,柴建云,孙旭东,等.电磁耦合调速风力发电机组模拟实验研究[J].中国电机工程学报,2013,33(3):92-98.
[4] YOUR,BARAHONA B,CHAI J,et al.A novel wind turbine concept based on an electromagnetic coupler and the study of tts fault ride-through capability[J].Energies,2013,6(11):6120-6136.
[5] YOU R,BARAHONA B,CHAI J,et al.Frequency support capability of variable speed wind turbine based on electromagnetic coupler[J].Renewable Energy,2015:681-688.
[6] 陈秋明.电磁耦合器的等效电路[J].微特电机,2014,42(9):4-6.
[7] 吴政球,干磊,曾议,等.风力发电最大风能追踪综述[J].电力系统及其自动化学报,2009,21(4):88-93.
[8] 李咸善,徐浩,杜于龙.采用叶尖速比法和爬山法相结合的风力发电系统最大功率点跟踪研究[J].电力系统保护与控制,2015(13):66-71.
[9] 付兰芳,孙鹤旭,王华君,等.基于永磁双转子电机调速的新型风力发电系统设计[J].电力系统自动化,2014,38(15):25-29.
[10] 陈伯时.电力拖动自动控制系统--运动控制系统[M].3版.北京:机械工业出版社,2006.
[11] NASIRI M,MILIMONFARED J,FATHI S H.Modeling,analysis and comparison of TSR and OTC methods for MPPT and power smoothing in permanent magnet synchronous generator-based wind turbines[J].Energy Conversion & Management,2014,86(5):892-900.
[12] INOUE Y,MORIMOTO S,SANADA M.Control method for direct torque controlled PMSG in wind power generation system[C]// Electric Machines and Drives Conference.IEEE,2009:1231-1238.
[13] Wind Turbine Blockset MATLAB/Simulink.Denmark:Aalborg University,2004.
猜你喜欢
电机与控制学报(2022年6期)2022-07-15
防爆电机(2022年2期)2022-04-26
小天使·五年级语数英综合(2021年9期)2021-09-18
军事文摘·科学少年(2017年2期)2017-04-26
家教世界·创新阅读(2017年1期)2017-02-07
文理导航·科普童话(2016年3期)2016-04-26
通信电源技术(2016年1期)2016-04-16
振动工程学报(2015年1期)2015-03-01
太阳能(2015年6期)2015-02-28
噪声与振动控制(2015年4期)2015-01-01
