
基于复合体制和Kalman滤波的交通测速雷达设计*
2017-04-26 10:42王东峰
网络安全与数据管理 2017年7期
于 琳,曹 林,王东峰
(1.北京信息科技大学 通信工程系,北京 100101;2.北京川速微波科技有限公司,北京 100018)
基于复合体制和Kalman滤波的交通测速雷达设计*
于 琳1,曹 林1,王东峰2
(1.北京信息科技大学 通信工程系,北京 100101;2.北京川速微波科技有限公司,北京 100018)
在深入研究各雷达体制基本原理及信号处理方法的基础上,根据实际交通管理需求现状,指出两种体制复合工作的必要性,分别对雷达系统硬件电路和DSP算法做出改进。通过MATLAB分析数据以及实际路测,能够准确得到目标机动车的速度和距离信息,车辆有效抓拍率高达99%以上,并有很好的抓拍一致性。该研究成果可对交通管理部门的监管工作提供便利,有效提高执法可靠性,具有重要的现实意义。
复合体制;多普勒测速;FMCW测距;Kalman滤波;速度补偿
0 引言
目前,测速雷达已成为交通管理部门检测车辆超速行驶的主要技术手段[1-2]。
经调研,现在常见的测速仪是文献[3]所述的采用多普勒体制的雷达测速仪,雷达触发仅依靠目标回波信号的强度进行判断,只能得到目标的速度信息。而文献[4]中所述的线性调频连续波雷达体制(linear Frequency Modulation Continuous Wave,FMCW)雷达,具有优良的距离分辨率,可以同时获得目标距离和速度信息,但由于距离频移与多普勒频移存在耦合效应,使得最终得到的速度、距离精度不高。
基于两种单体制方案都无法回避一些问题,本文提出了使用“连续波多普勒体制(Continuous Wave,CW)”和“FMCW体制”时分复用的复合体制雷达工作方案。该方案能很好地结合两种体制的优点,并互补对方的缺陷,通过FMCW测距配合多普勒测速,实现对目标的精确探测。从而保证了系统的抓拍率和抓拍照片信息的有效性。
另由于复合体制难度大,多用在军事雷达中[5],因此本文的研究对于民用微波雷达在交通领域的应用具有很大的指导意义。
1 复合体制雷达原理
在同一台雷达中,两种雷达体制不可能同时工作,因此,通过硬件电路进行改进,根据调制波形的分时切换,实现两种体制的时分复用。复合体制雷达时域波形如图1所示。
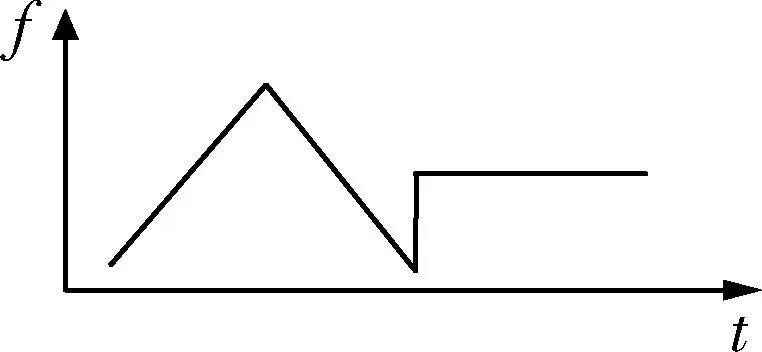
图1 复合体制雷达时域波形图
其中,三角波部分对应三角波调制的FMCW体制;直流部分对应固定发射频率的连续波多普勒体制。
1.1 复合体制原理介绍
CW体制下,根据多普勒效应,由多普勒频率得到当前目标速度v1,即:
(1)
其中,c为电磁波传播速度,f0为雷达工作频率,fd1为该体制下的多普勒频移。
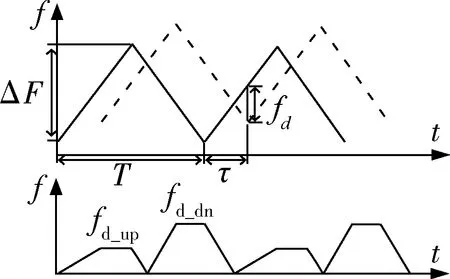
图2 三角波调制的FMCW工作原理图
而当体制开关切换到三角波调制工作时,其工作原理如图2所示,实线代表雷达发射信号,虚线代表目标的回波信号。
由目标回波信号与雷达发射信号之间的延时频移fdelay,得到静止目标距离R为:
(2)
其中,T为调制三角波周期,ΔF为调频带宽。
由于运动目标在三角波上升沿和下降沿得到的差频不等价,即:
fd_up=fdelay-fdopp
(3)
fd_dn=fdelay+fdopp
(4)
因此可得目标机动车的距离R和速度v2:
(5)
(6)
由式(1)可以看出,CW体制下得到的速度v1仅与多普勒频移fd1有关,通过FFT计算出准确的多普勒频移就能得到精确的速度值,但得不到距离值。
由式(2),静止目标依然存在多普勒频移,FMCW体制对于其照射范围内可能存在的固定强干扰没有分辨能力。而对于运动目标,从式(5)、(6)可以看出,延时频移fdelay与多普勒频移fdopp存在耦合效应,另一方面,由于近处车辆目标是非理想点目标,散射中心会发生变动,从而将延时频移误差引入到多普勒频移中。
基于以上分析,本文复合体制雷达采用式(1)得到精确的速度v1,并将此速度按照一定的规则替代FMCW体制下的速度v2,从而实现距离和速度的解耦合,提高测距分辨率的同时,不影响测速精度。
1.2 Kalman滤波算法

图3 车与雷达的相对位置图
对于雷达来说,人们关心的是雷达跟踪目标的距离和速度信息,而雷达测得的信息是含有噪声的。本雷达在实际道路交通中的应用示意图如图3所示。
图3中sm为雷达测得的目标距离,Vm为雷达测得的速度,V为车的实际行车速度,h为雷达与车顶之间的垂直距离。Vm与V之间存在如式(7)所示的关系:
(7)
本文雷达中断周期t0为13.12ms,机动车通过雷达照射范围的时间很短,因此,可认为在测速期间V是保持不变的,所以由式(7)可以看出,Vm在逐渐减小。
Kalman滤波器提供了一种有效的以最小均方误差来估计系统状态的递归计算方法[6]。因此,本文考虑通过Kalman滤波器去除噪声,对速度进行补偿,同时也对距离进行修正。
通过建模、初始化参量,得到目标的状态方程和观测方程:

(8)

与经典Kalman不同,矩阵A和H是变化的,即包含一个补偿系数η(k)。由式(7)可知,它与滤波器的状态s(k)相关。
因此,补偿系数更新如下:
(9)
该算法中,s(k)和v(k)的物理意义分别与sm和V的物理意义相同,滤波器的输出结果v(k)就是车的行驶速度V。由此,Kalman滤波器不断地进行“预测-修正”过程,把方差进行递归,对补偿系数也进行更新,从而得到最优的速度、距离值。
2 系统实现
2.1 硬件系统设计
本文所用雷达发射频率为24.15 GHz,数字信号处理模块采用TI公司的DSP—TMS320C6713B处理器,其每个周期可以执行多达8个32位指令,专为实时信号处理而设计,能有效满足雷达信号处理的实时性要求。其整体系统组成框图如图4所示。
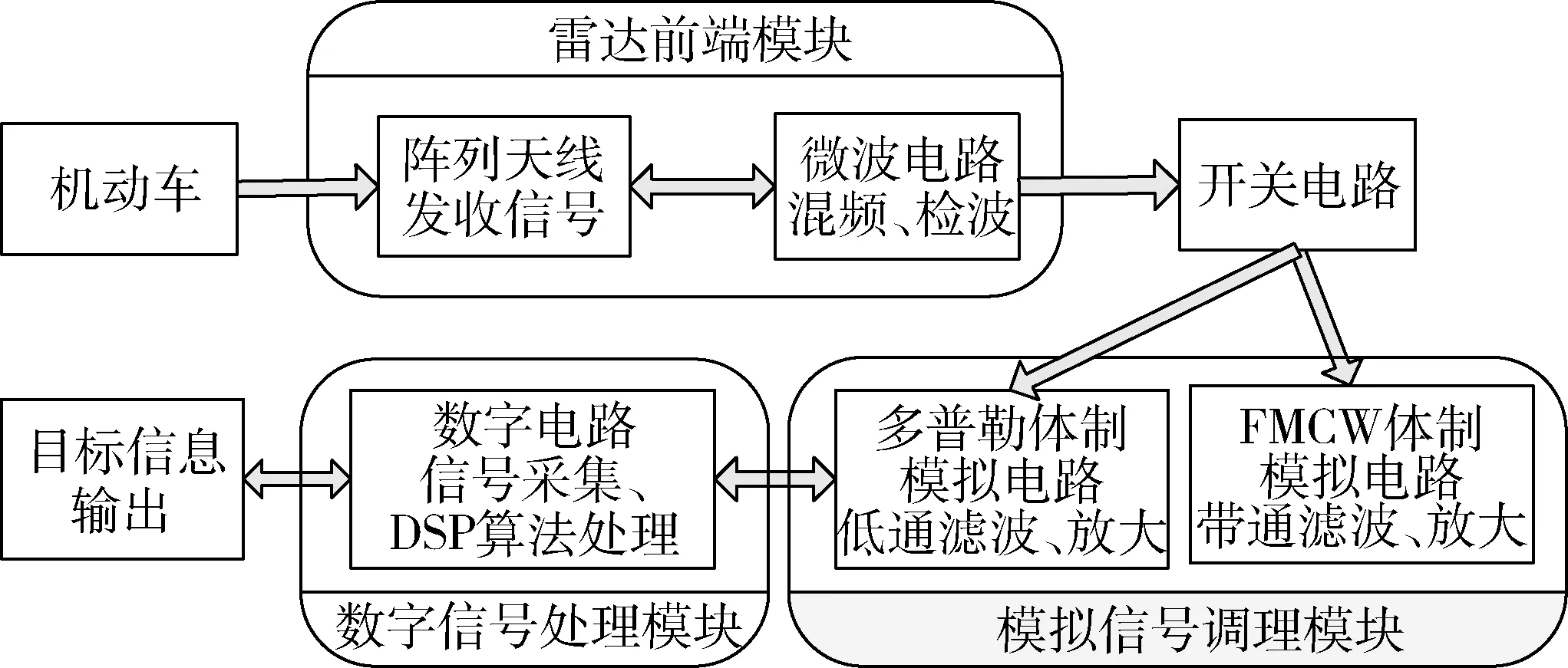
图4 雷达系统框图
可以看到,相对于传统的雷达测速仪,本文的复合体制雷达在硬件电路中新增了开关电路,通过STM32F051单片机控制其依次进行两种体制的切换。
2.2 DSP算法部分
为了充分利用复合体制的优势,关键还要在算法上实现复合。针对两种体制各自所包含的信息,算法进行重新规划,对两种体制信号并行处理。重新规划后的算法基本工作流程如图5所示。

图5 复合体制算法流程图
可以看到,算法新添了速度比较函数,使其根据上文所述原理,综合衡量两种体制的速度值。再通过Kalman滤波进行速度补偿,同时修正距离波动,由此便能实现测速、测距互不干扰,且相互修正的目的。
3 工程应用效果
通过路测采数,仿真验证方案可行性。
3.1 Kalman滤波前后速度、距离对比
根据1.2节的分析,基于Kalman滤波的速度补偿算法效果如图6所示,其距离修正效果如图7所示。
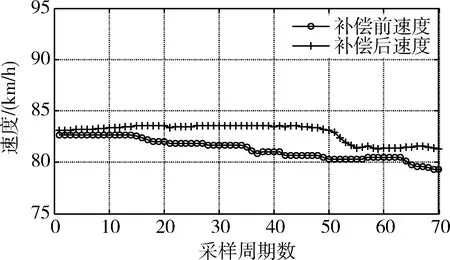
图6 Kalman滤波速度补偿效果图
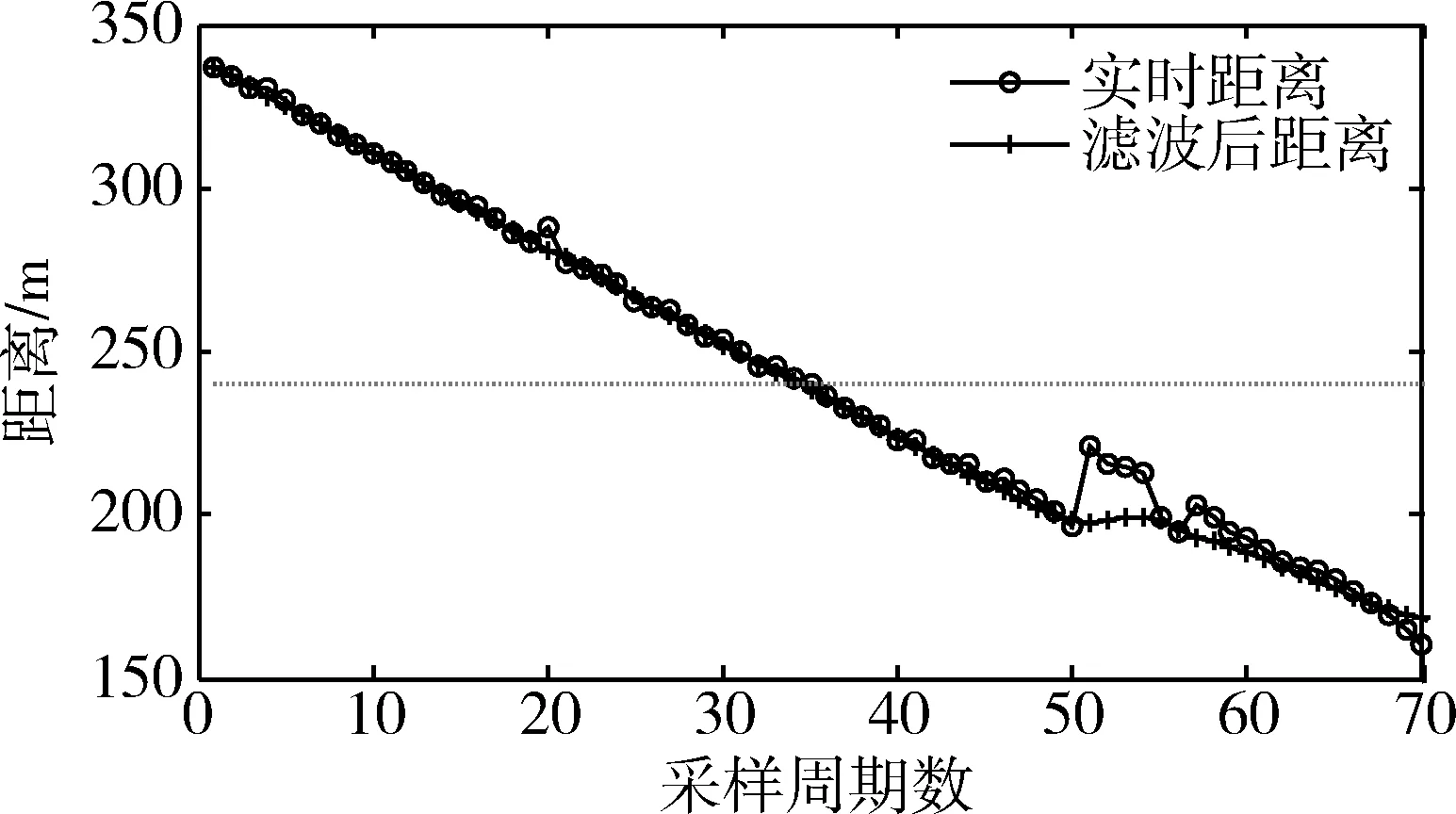
图7 Kalman滤波距离修正效果图
由图6,补偿后的速度波动范围为0~2.25 km/h,小于补偿前的波动范围0~3.41 km/h。并且补偿后的目标基本保持匀速运动,然而第50周期后速度突然下降,这可以从图7中找到原因,即该周期附近距离波动较大,导致其递归的方差变大,因此对其速度的补偿也受到影响。
由此可以看出,Kalman滤波能很好地补偿速度,并在一定程度上平滑掉距离的随机噪声,使得测量结果达到最优化。
3.2 复合体制所测速度与单体制速度对比
经算法仿真,得到各体制速度结果如图8、图9所示。图8(a)和图9(a)对应车辆距离信息随时间的变化,一个包络代表一辆车,由FMCW体制测得,并经过复合体制“速度-距离”修正;图8(b)和图9(b)对应3种体制所测得的同一车辆的速度信息,可以看出,FMCW体制所测速度衰减严重,速度误差很大;CW体制速度与最终复合体制速度较为一致,但也有少许衰减,这根据1.2节中式(7)也可得到验证。

图8 现场路测数据仿真结果(1)
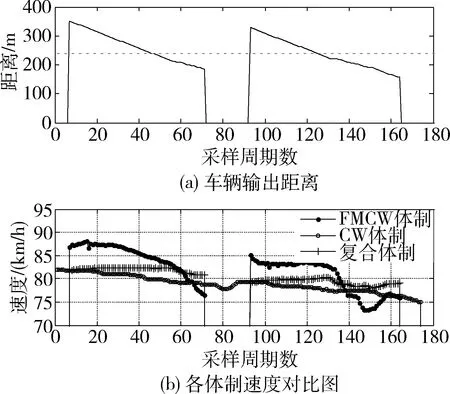
图9 现场路测数据仿真结果(2)
而对于图9,图中两辆车速度图中的CW速度曲线是连着的,没有分辨出车辆情况;而FMCW及复合体制均判断出两辆车。这是由于CW体制对运动目标较为敏感,跟车时间较长,车辆密集且速度接近时,不容易分辨目标所致。
综合来看,复合体制下得到的速度稳定性最好,并且由于Kalman滤波的补偿修正作用,使其更接近机动车目标的真实轨迹。
3.3 抓拍率
经现场采集视频与抓拍照片对比,抓拍率统计结果如表1。
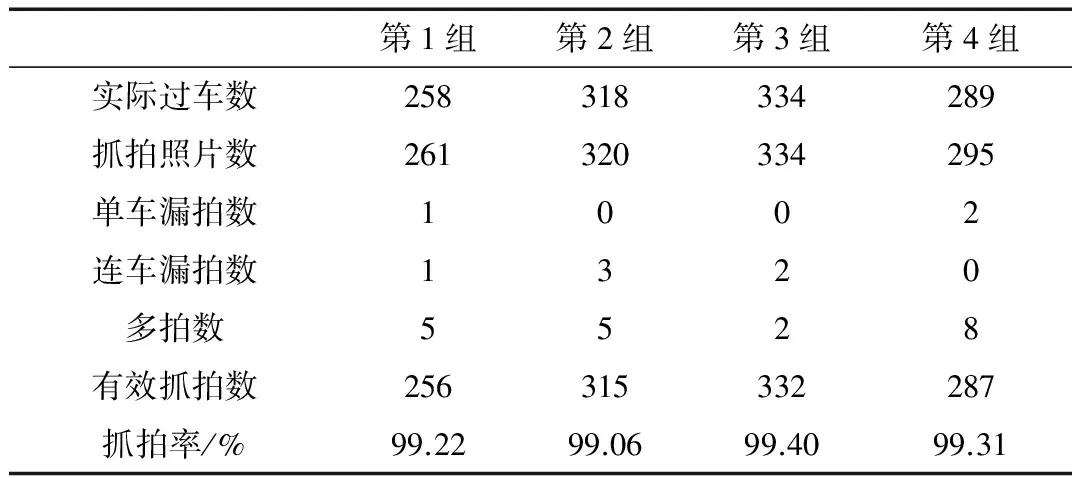
表1 复合体制测速雷达抓拍效果统计
从表中可以看出,复合体制测速雷达的有效抓拍率超过99%,而目前市场上常用的多普勒雷达有效抓拍率仅能达到90%,因此本复合体制雷达具有广阔的应用前景。
3.4 抓拍一致性
普通多普勒测速仪抓拍效果如图10所示,左图为正常距离抓拍,中间图为冲车,无法获得车牌的有效信息,右图为远距离欠拍,同样无法获得车辆的有效信息,导致废片。

图10 普通测速仪抓拍效果示例
而本文复合体制雷达相机抓拍效果如图11所示。很明显可以看出,车辆基本在同一位置触发,能够得到所拍车辆的车牌、车型等有效信息,而且与抓拍车辆的车型、车道内位置基本无关,抓拍一致性效果很好。

图11 复合体制雷达抓拍效果示例
4 结论
本文给出的雷达复合体制工作方案,通过电路、算法等的改进,综合两种体制的优势,并加入Kalman滤波算法对速度、距离进行补偿、修正,能够同时得到目标速度和距离信息的最优化值,使得雷达系统的工作效能最大化。这对于实际交通管理具有很大的应用价值。
[2] 陈力. 机动车雷达测速仪检测的现状及测速误差分析[J]. 计量与测试技术,2016,43(5):42-44.
[3] 赵仲郎. 交通测速雷达系统设计与实现[D].南京:南京理工大学,2012.
[4] 侯盼卫. FMCW测距雷达的信号处理技术研究与实现[D].太原:中北大学,2014.
[5] 林伟民. 空对地弹载毫米波复合体制雷达关键技术研究[D].南京:南京航空航天大学,2012.
[6] 周承松,彭竞,刘文祥,等. 速度自适应约束卡尔曼滤波方法[J]. 传感技术学报,2016,29(8):1180-1185.
The design of the traffic speed measuring radar based on composite system and Kalman filter
Yu Lin1,Cao Lin1,Wang Dongfeng2
(1. Department of Communication Engineering,Beijing Information Science & Technology University,Beijing 100101,China;2.Beijing Trans Microwave Science and Technology Company Ltd,Beijing 100018,China)
After a further study of the basic working principle and signal processing methods of the radar system, this paper points out the necessity to combine two kinds of systems according to the actual requirements of traffic management, and makes improvements on the hardware and the DSP algorithm of radar system. By data analysis in MATLAB and the actual road test, it is possible to accurately obtain the speed and distance information of target vehicle with an effective capture rate of over 99% and a good capture consistency. The research achievements provide great convenience for the supervision work of the traffic administrative department, improve the reliability of law enforcement, and have important practical significance.
composite radar system; Doppler velocity; FMCW range; Kalman filter; speed compensation
国家自然科学基金(61671069)
TN958.95
A
10.19358/j.issn.1674- 7720.2017.07.018
于琳,曹林,王东峰.基于复合体制和Kalman滤波的交通测速雷达设计[J].微型机与应用,2017,36(7):59-62.
2016-11-11)
于琳(1991-),女,硕士研究生,主要研究方向:雷达传感器信号处理。
曹林(1977-),通信作者,男,博士,副教授,主要研究方向:信号与信息处理。E-mail:charlin26@163.com。
王东峰(1974-),男,博士,副研究员,主要研究方向:雷达传感器信号处理。
猜你喜欢
中国临床医学影像杂志(2022年5期)2022-07-26
北京航空航天大学学报(2021年9期)2021-11-02
潍坊学院学报(2021年3期)2021-08-23
中外医疗(2016年15期)2016-12-01
中国卫生(2016年10期)2016-11-13
中国卫生(2016年11期)2016-11-12
中国继续医学教育(2015年5期)2016-01-07
海军航空大学学报(2015年1期)2015-11-11
中国卫生(2015年6期)2015-11-08
空间控制技术与应用(2015年3期)2015-06-05
