
服务机器人导航与调度系统技术研究*
2017-04-26 10:42邹风山
网络安全与数据管理 2017年7期
邹风山,赵 彬
(1.沈阳新松机器人自动化股份有限公司,辽宁 沈阳 110168;2.中国科学院沈阳自动化研究所,辽宁 沈阳 110016;3.东北财经大学 工商管理学院,辽宁 大连 116025)
服务机器人导航与调度系统技术研究*
邹风山1,2,赵 彬1,3
(1.沈阳新松机器人自动化股份有限公司,辽宁 沈阳 110168;2.中国科学院沈阳自动化研究所,辽宁 沈阳 110016;3.东北财经大学 工商管理学院,辽宁 大连 116025)
针对服务机器人导航和调度系统问题进行了研究。首先根据事先确定的任务进行自主全局路径规划,移动机器人在执行路径跟踪时,还要不断感知周围的局部环境信息;其次,移动机器人不仅要避开附近的移动障碍物,而且要进行局部规划或局部路径修正;然后,完成了地图创建、机器人全局定位、规划局部路径并控制车体运动;最后,介绍了服务机器人调度系统终端软件。实现了机器人与调度系统的结合,完成通过调度系统进行机器人运动控制的功能。
移动机器人;地图创建;定位;调度系统
0 引言
服务机器人作为机器人行业的主打产品系列之一,其适用范围越来越广,在酒店引领、商场导购、餐厅送餐、展示讲解等领域已成熟应用[1]。智能服务机器人在我国先进制造技术的发展中起着关键的作用,将机器人技术与信息技术相结合,面向家庭的智能服务机器人应用程序将成为未来数字家庭的关键角色。移动机器人心脏的中央处理单元RC接收多个传感器融合信息,使机器人能够理解它们的周围和外部环境信息[2]。利用这一方法实现实时运动控制决策,找到最优路径。由于传感器和控制器的作用,一方面,移动机器人在没有人工干预的条件下,完成自主运动规划实现自主避碍;另一方面,可以采取多种控制方式实现半自动运行。如操作者通过键盘和鼠标发送控制命令,使得机器人能够理解人类语言[3]。同时,机器人还可以根据声音命令,实现云数据学习和网络访问,远程服务使得机器人不仅可以从远程位置环境中获取信息,还可以帮助运动和控制决策等[4]。
本文以自主移动机器人可以模拟人类自我学习的过程为目的,将其功能研发分为理解自己的状态和外部环境信息,从而实现实时运动控制决策、避障、找到最优路径;在栅格地图表征环境下,采用Wavefront方法进行路径规划、自主移动和轨迹跟踪。对服务机器人实现服务机器人调度系统调度服务器功能,完成系统内机器人的整体调度规划和命令下发。实现服务机器人调度系统PC终端软件,完成PC端的机器人调度申请功能。打破国外发达国家在智能服务机器人领域的相关技术封锁,提高我国智能服务机器人的技术水平,促进我国智能机器人产业的发展。
1 移动机器人导航定位
本系统将利用通用激光雷达数据预处理方法对数据进行预滤波,有效提取信息中的有效部分,降低数据量[5]。同时,采用通用预处理方法可以降低定位与地图创建系统对环境先验知识的要求,极大提高系统可靠性和广泛适用性。
1.1 可靠环境感知方法
如图1所示,环境感知是地图创建的基础。二维激光雷达对环境离散化程度高,受遮蔽等影响大。面向定位的激光雷达数据通用特征提取方法利用环境的先验知识可以很容易地解决这些问题,提高特征提取的精度,但在环境不符合先验知识的情况下,将产生大量不稳定的特征,严重影响定位系统的鲁棒性。
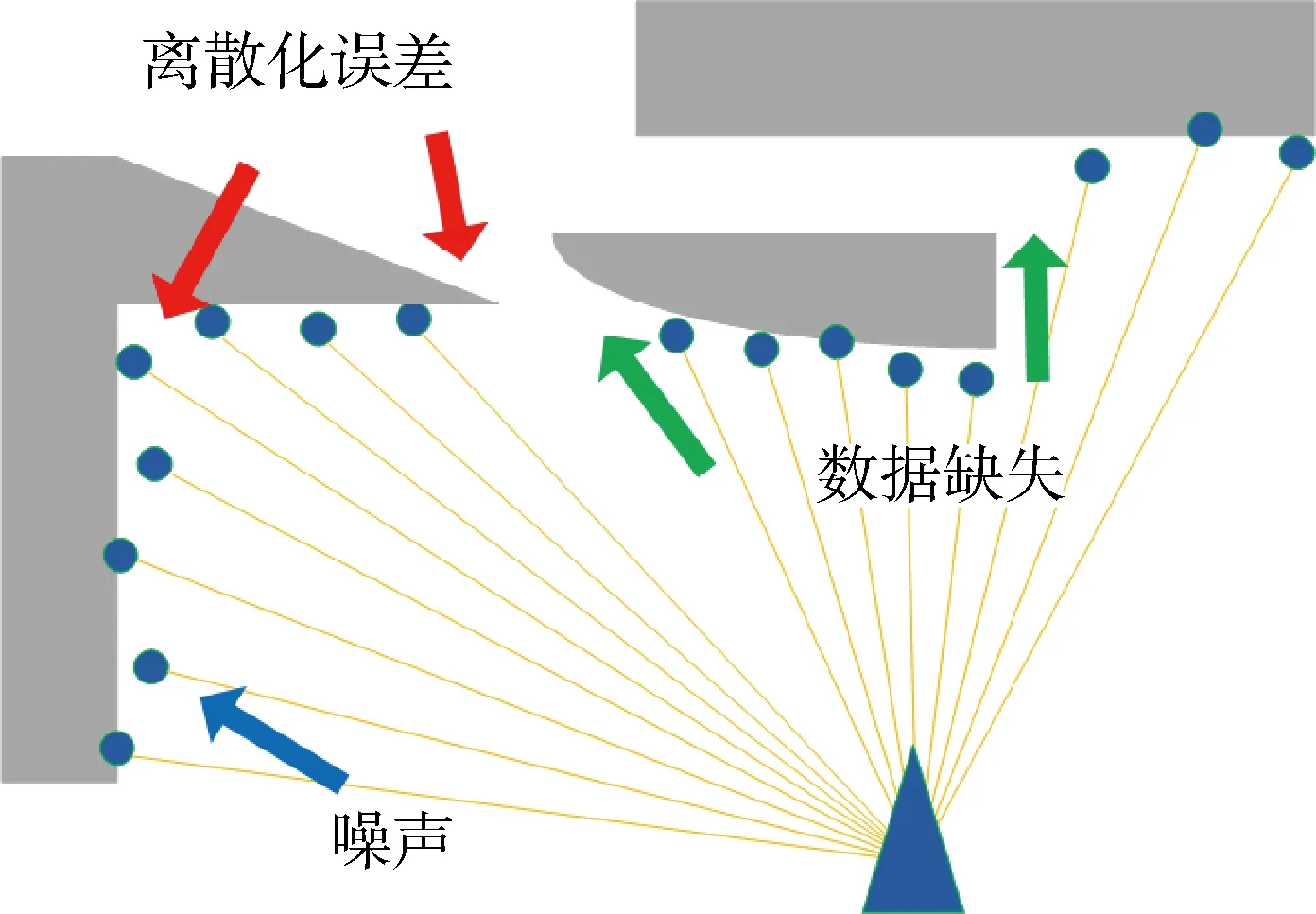
图1 面向定位的激光雷达数据
为了解决这些问题,在对数据进行滤波、分割的基础上提取这些离散点构成的网格的结构张量,如图2所示。这些信息稳定且可以广泛地应用于多边形、弧形及丛状物体(Blob)的激光雷达观测之中。通过解决噪声问题、离散化问题和结构张量正规化(Normalization)问题,可以成功地对二维激光雷达进行特征提取,经过实验验证,这种方法提取的特征比基于环境先验知识所提取的特征更加稳定、精确。
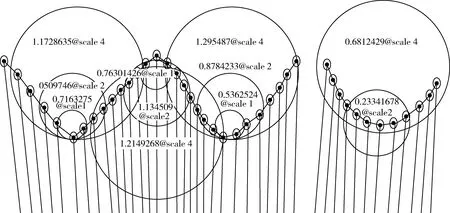
图2 基于结构张量的多尺度特征提取
1.2 粒子滤波
利用粒子滤波思想,用粒子来表示机器人的位姿,在整个地图分布粒子,利用观测计算粒子的权值,对权值进行归一化处理,根据粒子权值进行重采样。重采样就是舍弃权值小的粒子,让权值大的粒子分裂出新的粒子,然后再重新计算粒子的权值,如此迭代,直到收敛。
在地图创建后(或在已知环境中),利用数据关联的方法,可以对移动机器人进行定位。这个问题称作全局定位问题。由于数据关联的复杂性和数据关联具有的指数复杂度,全局定位问题被看做是一个复杂的问题。传统的数据关联方法要求移动机器人对位置先验信息具有很高的确定度。但是,在一般的定位应用中,这是难以满足的。同样地,利用基于后验概率的数据关联方法,可以在位置先验信息不确定度较差的情况下,准确地获取数据关联结果。
1.3 移动机器人定位与地图匹配
地图匹配与合并可以将创建的局部地图合并入全局地图中,或将多个局部地图合并创建全局地图。地图匹配与合并的核心是计算正确的地图转移量。在二维环境中,这个地图转移量包含在X和Y方向的平移距离以及一个旋转角。地图转移量的计算需要找到地图之间的相似目标,进而验证地图根据该相似目标进行合并后的似然函数。图3给出了一个地图合并的例子。地图合并的核心在于有效特征的提取与数据关联。
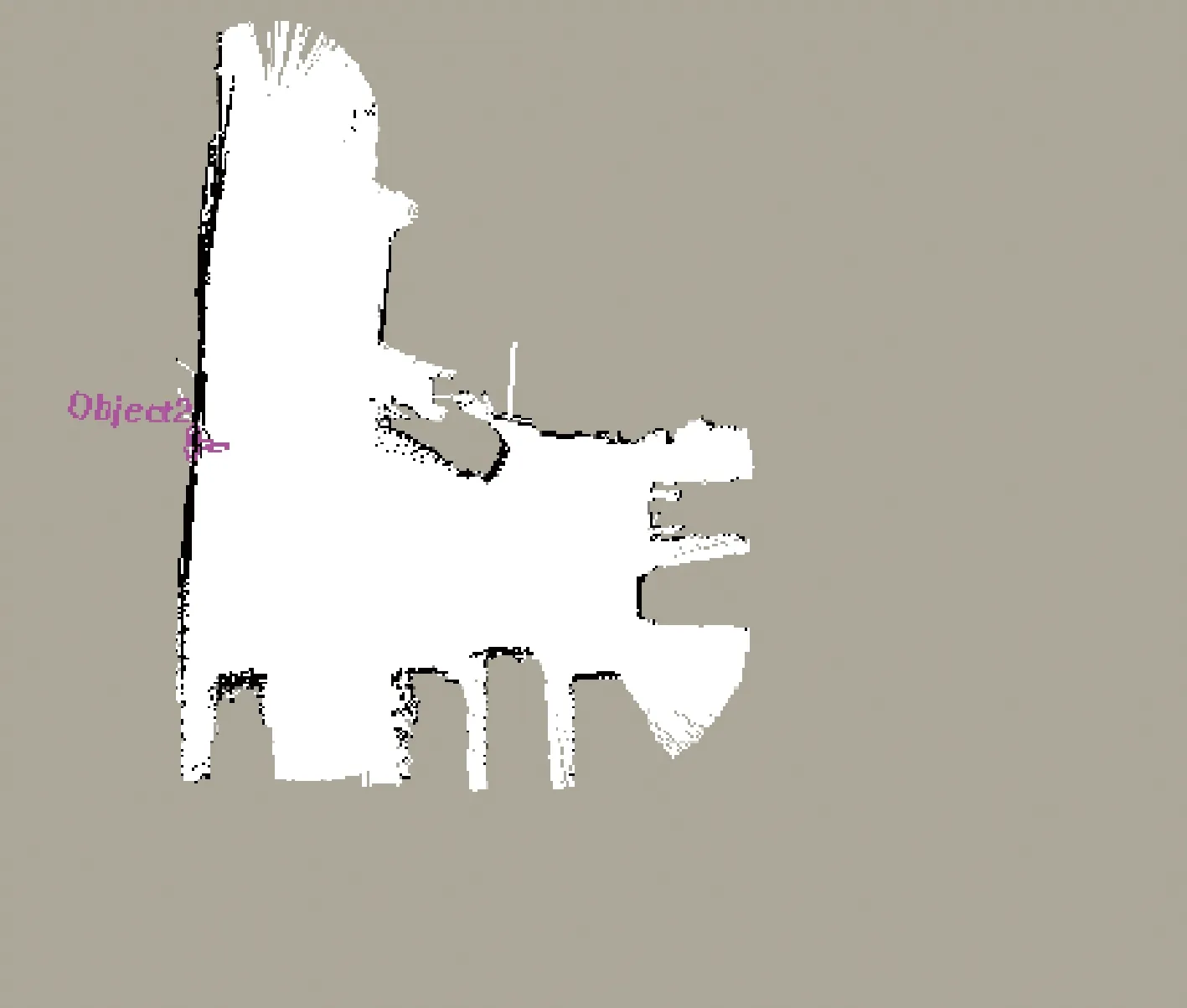
图3 特征地图合并
2 移动机器人路径规划
要研究机器人路径规划首先构建一张地图,取定位点,通过PAD操作创建如图4所示的地图。地图创建完成后,手动遥控实验平台运动,并使用PC端软件的地图显示功能实时监控实验平台运行,确认实验平台实际运行位置和地图上显示位置是否一致。
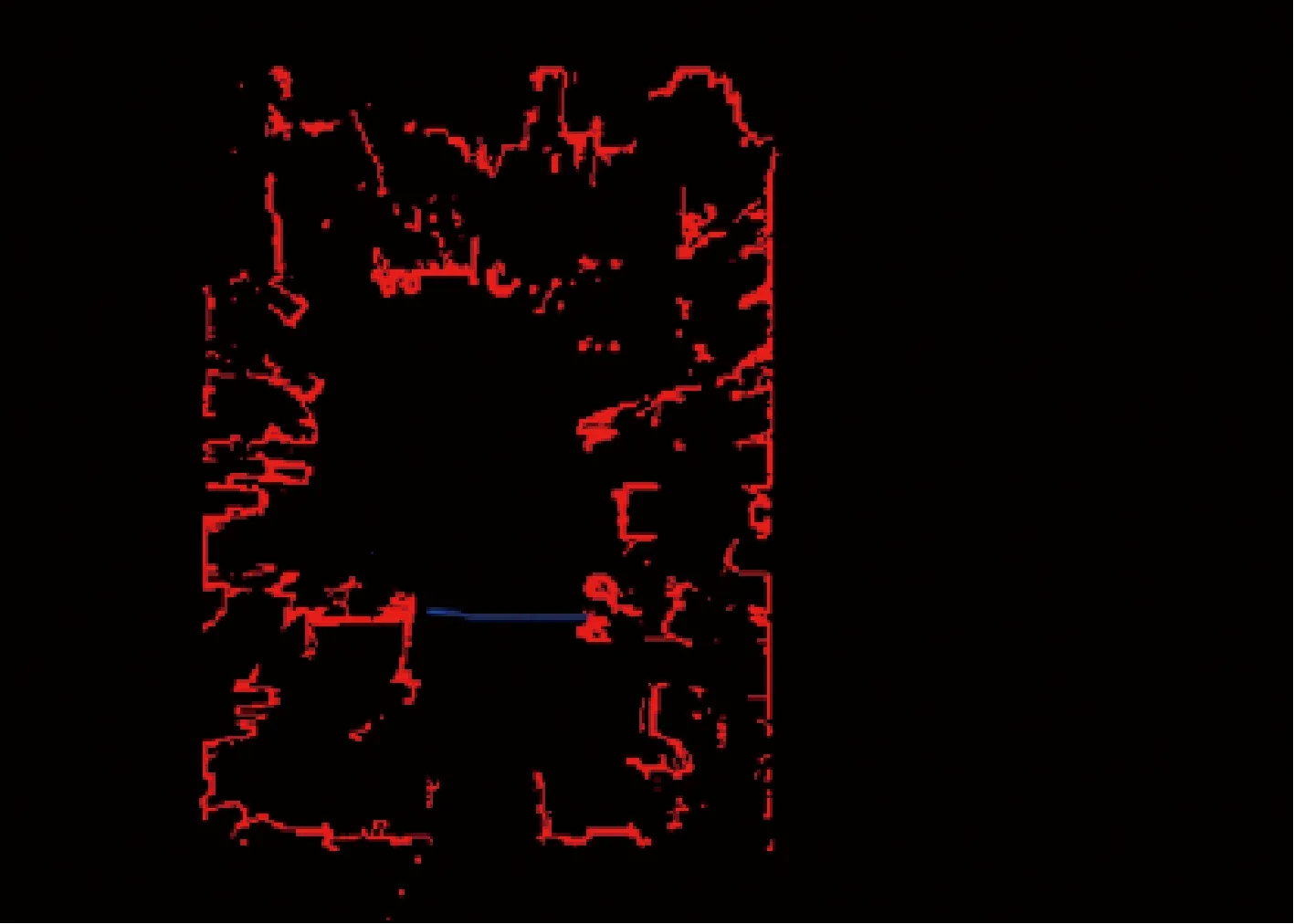
图4 实验室地图
2.1 移动机器人路径规划
将全局路径规划方法与局部路径规划方法相结合,将基于反应的行为规划与基于慎思的行为规划相结合,解决路径规划算法的合理性、完备性、最优性、实时性以及对环境变化的适应性问题,同时保证机器人在动态不确定环境下,能够在满足自身运动学约束的前提下,以最短路径代价运动到目标点。
2.2 Wavefront法
由于室内环境规模较小,环境内障碍物相对较多,一般室内环境都采用栅格地图或拓扑度量地图标示。本系统拟采用栅格地图表征环境。在栅格地图中,采用Wavefront方法进行路径规划是一种简洁、可靠的选择。Wavefront方法将地图看做一个可导热的物体,环境中的障碍物为热绝缘体;出发点被看做热源,热量从热源扩散出去。当热量到达目标点时,热量停止扩散,同时产生有效路径。利用这种方法,可以确保有效路径的探测率达到100%,同时,可以根据应用需求,在安全性和能量效率之间进行平衡,产生定义的最优路径。然而,由于计算复杂度的原因,Wavefront方法不适用于大规模环境之中。
3 机器人调度系统
3.1 服务机器人调度系统
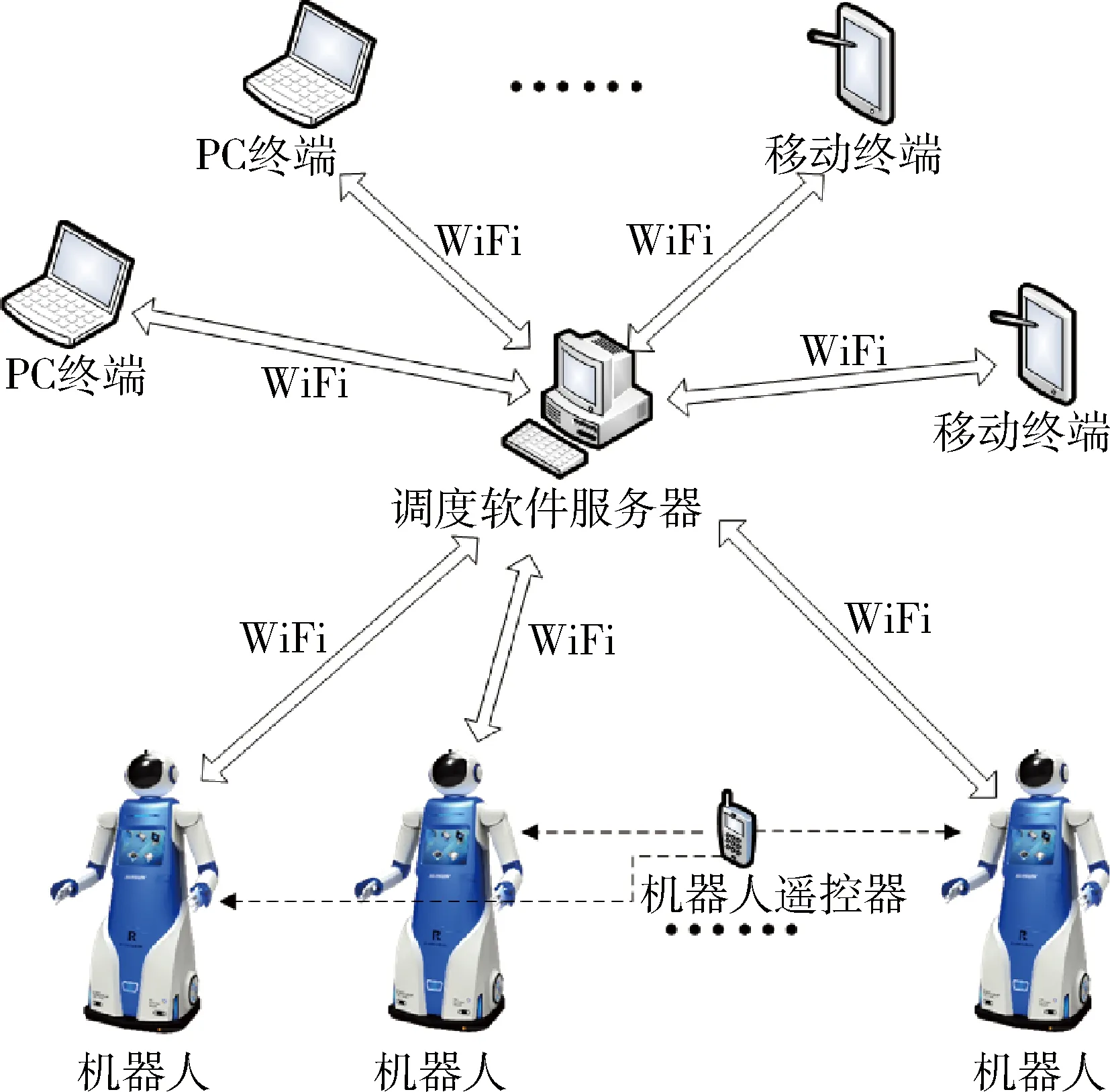
图5 基于ICE中间件的分布式软件系统
多个机器人能够协调工作是服务机器人提高自身应用价值、推广市场和提高用户体验的必备功能。因此需要一套调度系统,在多台机器人协同作业时进行统一规划和调度,使机器人能够高效地配合完成较为复杂的任务。图5所示为基于ICE中间件的分布式软件系统。该系统由以下模块构成:PC、移动终端,其作为任务下发构件;调度服务器,其作为任务处理、路径规划构件;机器人,作为任务执行构件。
3.2 系统功能结构
系统功能结构包括:机器人状态信息采集和处理(位姿、运行状态、电量);地图管理功能(地图编辑、下载、上传、派发、切换);任务管理功能(任务生成、分解、排序、下发);路径规划功能(静态规划、动态规划、二次规划);充电管理功能(低电量充电、空闲充电、充电站管理);日志记录功能(任务日志、调度日志)。
3.3 规划策略
规划策略:基于关键点的路径生成和使用代价计算。
规划步骤:(1)关键点及其关联关系创建;(2)基于关键点的有向图模型建立;(3)使用Dijkstra算法计算,并保存关键点之间的路径及其静态代价;(4)机器人关键点使用优先级处理、冲突处理及等待代价计算;(5)所有机器人路径优先级排列遍历,计算总体代价最小值;(6)依据代价最小的机器人路径组合,计算冲突关键点的使用次序;(7)监视器依据关键点的使用次序,调度机器人。
4 结论
本文首先系统地描述了移动机器人导航定位中躲避障碍物、可靠环境感知、鲁棒数据关联和基于位姿的粒子滤波方法,在栅格地图表征环境中,采用Wavefront方法进行路径规划。其次,机器人可以通过环境感知传感器采集环境信息,实现自主路径规划并运动到预先设定的目标点,无需人工干预。移动机器人具体工作时根据事先确定的任务自主进行全局路径规划,在执行此路径的跟踪时,还要不断感知周围的局部环境信息,避开附近的移动障碍物,即要进行局部规划或局部路径修正。最后,多个机器人协同作业时进行统一规划和调度,使机器人能够高效地配合完成较为复杂的任务。鉴于此,对服务机器人导航与调度系统技术研究不仅满足我国对未来多种类的高性能智能服务机器人需求,而且对占领市场具有重要的战略意义。
[1] 沈友建, 黄孝鹏, 肖建.基于STM32的机器人自主移动控制系统设计[J]. 微型机与应用, 2016,35(18): 12-14.
[2] Wang Bingfeng, Cui Shigang, Zhao Li, et al. Mobile robot map building based on grid arrangement[J]. Artificial Intelligence and Computational Intelligence, 2009, 09(2): 288-291.
[3] LEE Y C, CHRISTIAND, YU W, et al. Satellite image based topological map building method for intelligent mobile robots[C]. Intelligent Vehicles Symposium, 2012,7(2272): 867-872.
[4] 李建军. 国产化嵌入式实时操作系统软件测试方法研究[J]. 微型机与应用, 2016,35(24): 24-29.
[5] GUIVANT J, NEBOT E, BAIKER S. Autonomous navigation and map building using laser range sensors in outdoor applications[J]. Journal of Robotics Systems,2000,17(10):565-583.
Research on navigation and scheduling system for service robots
Zou Fengshan1,2,Zhao Bin1,3
(1.SIASUN Robot & Automation Co., Ltd., Shenyang 110168, China; 2.Shenyang Institute of Automation, Chinese Academy of Science, Shenyang 110016, China; 3.College of Business Administration,Dongbei University of Finance and Economic,Dalian 116025,China)
In this paper, the problem of navigation and scheduling system for service robots is studied. Firstly, according to the pre-determined tasks, the global path planning is carried out. And, when mobile robot tracks the path, the local environment information is continually perceived. Secondly, mobile robot not only avoids nearby mobile obstacles, but also to make local planning or local path correction. Then, robot makes map creation, and the control of body motion is performed. Finally, the service robot scheduling system terminal software is introduced. The combination of robot and dispatching system is realized, and the function of robot motion control is completed through the scheduling system.
mobile robot; map building; positioning; path planning
国家科技重大专项(2014ZX02103)
TP242.3
A
10.19358/j.issn.1674- 7720.2017.07.017
邹风山,赵彬.服务机器人导航与调度系统技术研究[J].微型机与应用,2017,36(7):56-58,62.
2016-12-12)
邹风山(1978-),通信作者,男,博士,主要研究方向:机器人控制与应用。E-mail:zoufengshan123@sohu.com
赵彬(1987-),男,硕士,软件工程师,主要研究方向:机器人及自动化。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
铁道通信信号(2020年10期)2020-02-07
北京航空航天大学学报(2019年9期)2019-10-26
成都信息工程大学学报(2019年3期)2019-09-25
三门峡职业技术学院学报(2019年1期)2019-06-27
制造技术与机床(2017年3期)2017-06-23
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28
