基于51单片机的盲人避障系统设计
2017-04-20 13:53刘旭蔡丽
科教导刊·电子版 2016年35期
刘旭 蔡丽
摘 要 随着单片机技术的广泛應用,盲人导航系统可以采用单片机进行设计,本文主要以盲人手杖为载体,以51单片机为核心,采用红外技术,通过语音模块提示实现盲人避障的目的,本系统主要由三部分构成,包括红外发射模块,红外接收模块和语音提示输出模块。
关键词 单片机 盲人拐杖 导航
中图分类号:TP368 文献标识码:A
0引言
目前盲人导航主要靠传统的手杖,不便为盲人提供路面信息,这类拐杖的弊端很多,只能通过手杖碰触感知前方地面物体,而难以发现较远的物体或者半空物体。当前国内生产的导盲设备也存在各种问题,而国外成熟的手杖产品价格较贵,难以普及化,因此采用廉价的单片机进行盲人导航设计具有实际意义。
本文主要以盲人手杖为载体,以51单片机为核心,由红外发射模块、红外接收模块和语音提示输出模块组成。通过红外技术,用语音模块提示实现盲人避障的目的。本系统主要分析盲人前方或半空遇到障碍物时,当距离障碍物大于50CM以正常速度前进,当小于50CM时根据语音提示,停止或者拐弯,从而实现避障目的。
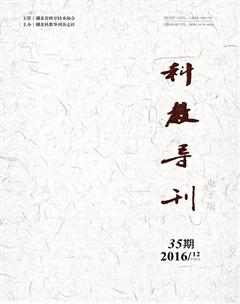
2硬件系统设计
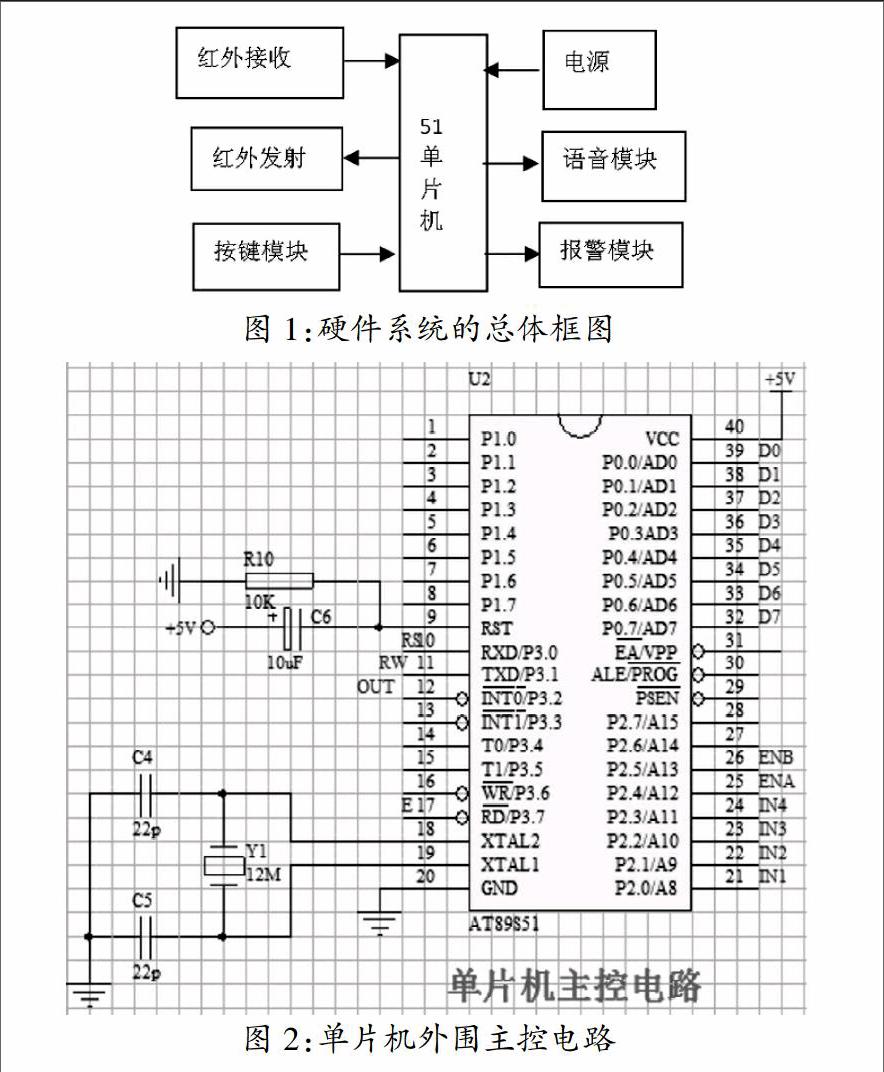
系统硬件组成如图1所示,利用单片机的中断对红外线发射管进行调制发射38KHz信号,发射距离远近可由可调电阻调节。发射出去的红外线遇到避障物的时候反射回来,红外线接收管对反射回来信号进行解调输出TTL电平,在遇障碍物时控制电机并使基础机器人转向。外界对红外信号的干扰比较小,且易于实现。接收头采用HS0038A2型一体化接收探头,接收头的输出脚OUT与单片机INT0引脚相接,如图2所示。红外接收头在没有接收到红外信号时,INT0输出高电平,单片机不中断。在接收到信号时输出低电平,单片机中断。
目前单片机系列很多,比较常用的如Intel公司的MCS-48系列、MCS-51系列、MCS-96系列产品。本系统中选用51系列中的AT89S51。
传感器选择至关重要,目前有超声波、红外、视觉、雷达等方式,各有优缺点,其中超声波夜间不受影响,但容易受到环境影响,如天气等;视觉传感器分辨率好,但是不能直接测量距离,处理过程相对复杂;雷达也不受夜间影响,但容易受灰尘等因素的影响;而红外传感器价格合理,检测距离满足要求。因此选择红外传感器HS0038A2。
语音模块采用ISD4004系列单片语音录放芯片,工作电压3V,适用于便携式电子产品,采用CMOS技术,内含振荡器、防混淆滤波器、平滑滤波器、音频放大器、自动静噪,其操作命令可通过串行通信SPI接口送入,而且采样频率越低,录放时间越长。
3软件系统设计
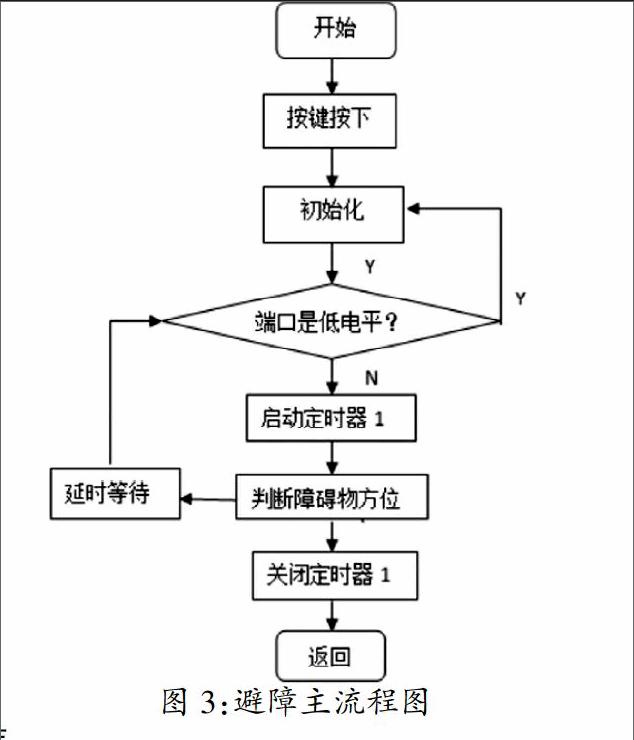
51单片机的作用是通过实时监控超声波模块传送的信号,通过采集来的红外信号进行处理,最后对信号进行避障决策判断。主控程序流程图如图3所示,图3表示主流程,开始初始化,查询按钮键是否按键,确定单片机是否启动;采用外部中断的方式来实现,通过手杖底部和中部分别安装两组红外探头,检测手杖地面和半空中的障碍物,当检测到地面障碍物或者半空障碍物时引起外部中断。在正常情况下,遇到障碍后,INT0接收到信号,手杖自动报警并提示前方有障碍,若系统中没有等待定时器的中断信号产生时,手杖不会做出输出指示。当左边检测到障碍时,语音提示向右转;当右边检测到障碍时,语音提示向左转,左右都有障碍时停止前进。
4小结
本文介绍了一种简单的盲人避障系统,结合单片机技术和红外感应技术,以盲人手杖为载体,以AT89S51单片机为核心,结合红外传感器检测模块,给出软硬件结构,通过语音提示可及时起到报警和提醒作用,从而实现盲人避障功能。该电路具有结构简单、性能稳定。
猜你喜欢
电子制作(2019年13期)2020-01-14
电子制作(2019年15期)2019-08-27
电子制作(2019年9期)2019-05-30
电子制作(2018年12期)2018-08-01
电子制作(2017年19期)2017-02-02
电子设计工程(2015年15期)2015-02-27