
一类含有滞回故障非线性系统Backstepping变结构控制
2017-04-19 09:50胡剑波王坚浩
哈尔滨工业大学学报 2017年4期
李 飞,胡剑波,王坚浩,郑 磊
(1.空军工程大学 理学院,西安 710051;2. 空军工程大学 装备管理与安全工程学院,西安 710051)
一类含有滞回故障非线性系统Backstepping变结构控制
李 飞1,胡剑波2,王坚浩2,郑 磊2
(1.空军工程大学 理学院,西安 710051;2. 空军工程大学 装备管理与安全工程学院,西安 710051)
为解决执行器发生未知故障情况下不确定非线性系统的控制问题,采用一种自适应Backstepping变结构控制方法,建立了包括滞回非线性和失效、卡死等故障类型的非线性执行器模型.通过径向基函数(radial basis function, RBF)神经网络逼近系统中的未知非线性函数项,神经网络参数根据自适应律实时调整,保证了逼近效果.结合动态面控制,避免了Backstepping控制中的计算复杂性问题.引入的自适应补偿项消除了系统建模误差和不确定干扰的影响,理论分析证明了闭环系统半全局一致最终有界,仿真结果验证了该方法的有效性.
滞回非线性;未知故障;不确定性;自适应Backstepping控制;RBF神经网络
滞回非线性广泛存在于电磁、继电器、作动器、机电伺服等实际控制系统中[1-5],其表现出的多值性和不可微性严重影响被控系统的性能,甚至会造成系统不稳定[6].近年来,许多学者[7-10]针对此类非线性执行器的控制问题进行了广泛研究,并取得了一系列研究成果.
文献[7]利用自适应控制方法,针对受死区输入特性影响的非仿射非线性系统给出了控制器的设计方法,为解决存在滞回非线性输入特性的系统控制问题提供了有益借鉴.文献[8-9]针对一类存在Prandtl-Ishlinskii滞回输入的非线性系统提出了一种自适应动态面控制方法,有效补偿滞回非线性导致的系统不确定性的同时,动态面控制方法克服了Backstepping控制设计中存在“计算膨胀”的问题.文献[9]讨论了时滞非线性系统的自适应动态面控制器的设计问题.文献[10]通过Duhem模型对滞回非线性进行建模,设计了自适应动态面控制方案,简化了控制器复杂程度.文献[11]通过构造光滑的Backlash-like滞回及其逆的数学模型,基于自适应Backstepping控制设计了鲁棒控制器,克服了滞回非线性对系统的影响,但是控制器对滞回非线性的补偿误差依赖于其数学模型的精确程度.上述研究成果主要针对模型确定系统或是参数不确定性系统,且对滞回非线性模型施加了诸如逆存在、可微等限制条件.
本文针对一类具有非线性函数不确定和有界外界干扰的非线性系统,考虑非线性执行器发生未知故障的情况下,利用Backstepping滑模控制方法提出了一种鲁棒控制器设计方案.该方案建立了非线性执行器故障模型,包含了滞回非线性和失效、卡死等故障类型;利用RBF神经网络逼近系统的未知非线性函数项,RBF神经网络权值向量根据自适应律实时调整,保证了逼近效果;借鉴动态面控制思想,在Backstepping设计中引入一阶低通滤波器,避免了Backstepping控制器计算复杂性问题;利用改进的自适应滑模项有效补偿了系统不确定干扰的影响.通过理论分析,证明了系统输出能趋近于参考指令信号的邻域,仿真结果证明了该方案的有效性.
1 问题描述
考虑如下不确定非线性系统:
(1)

本文对滞回非线性进行建模描述[12],其微分方程如下:
(2)
式中:Ai、Bi、Ci分别为常数,且Ci>0,Ci>Bi;vi为带有滞回非线性的执行器输出.
由式(2)可知:

(3)

(4)

假设第i个执行器在ti时刻发生故障,t时刻(t≥ti)执行器输出可表示为
(5)
式中,0≤ρi≤1为执行器失效程度,uki为执行器发生卡死故障后固定输出.由此,式(5)可表示3类执行器状态:
(Ⅰ)ρi=1,uki=0,表示执行器正常工作,φ(vi)=vi;
(Ⅱ)0<ρi<1,uki=0,表示执行器部分失效,φ(vi)=ρivi;
(Ⅲ)ρi=0,表示执行器完全失效,即卡死,φ(vi)=uki.其中,uki=0表示一种特殊的卡死故障,即执行器卡死在0力矩位置,也可称为执行器松浮故障;uki=vimaxorvimin表示执行器卡死在极限位置,也可称为执行器饱和故障.

图1 滞回非线性执行器输入输出关系
综合式(3)和式(5),可知滞回非线性执行器不确定故障模型可表示如下:
(6)
由式(1)可知,系统模型可以表示如下:
(7)

假设1 执行器在一个工作周期内只发生一次故障,即由正常状态变为部分失效状态或由正常状态变为完全失效状态.且发生完全失效的执行器个数不超过m-1个.
假设2 未知不确定扰动项有界,即

假设3 参考指令信号yr及其n-1阶导数已知且有界.
设计RBF神经网络逼近系统中未知函数项,其表达式为

引理1[13]对于任意连续函数h(Z),存在RBF神经网络hnn(Z)=W*Tξ(Z)使得

式中:ε*>0;ε(Z)=h(Z)-hnn(Z)为神经网络的逼近误差.W*为最优权值向量,取值为
为提高系统对不确定性和未知干扰的鲁棒性,在控制器设计过程中引入滑模变结构控制项[14].在Backstepping控制器推导过程中每一步骤要用到上一步骤虚拟控制函数的导数,且滑模控制的不连续易诱发高频抖振,本文采用以下一类连续可导的平滑函数代替滑模变结构控制中的符号函数:
引理2[15]对于η>0,x∈R,连续可导函数g(x)满足如下不等式:
针对不确定非线性系统(7),基于Backstepping滑模控制思想设计自适应鲁棒控制器,有效补偿系统不确定性、滞回非线性以及执行器未知故障的影响,使得系统输出信号跟踪参考指令信号,且闭环系统所有信号半全局最终有界.
2 控制器设计及稳定性分析
定义闭环系统跟踪误差为:
(8)
式中e1为系统跟踪误差,αi-1为第i-1阶子系统的期望虚拟控制信号.
Step 1 由闭环系统(7)可知,系统跟踪误差e1的导数为



(9)


(10)
选择切换函数s1=e1,则可设计在不考虑e2时的自适应变结构虚拟控制律为
(11)
式中η1>0,k1>0为设计参数.
借鉴动态面控制思想,为避免Backstepping推导过程中对虚拟控制信号反复求导带来的“计算膨胀”问题,引入一阶低通滤波器对虚拟信号进行滤波处理,简化了虚拟信号导数求解的过程.滤波器动态方程如下:
式中τ1>0为滤波器时间常数.则虚拟控制的导数可表示为
定义Lyapunov函数为
对V1按时间t求得
在自适应律(9)、(10)和虚拟控制律(11)的作用下,V1按时间t求导得

由引理2可知:
Stepi第i阶子系统跟踪误差ei的导数为
类似地,选择切换函数si=ei,可设计如下虚拟控制律:

式中ηi>0,ki>0为待设计参数.
(12)
(13)

在第i-1阶子系统,采用动态面控制得到虚拟控制的导数为
由此,第i阶子系统虚拟控制取为

定义Lyapunov函数为
在虚拟控制律(12)和自适应律(13)的作用下,容易导出Vi按时间t的导数为
(14)
Stepn第n阶子系统跟踪误差en的导数为
可设计第n阶子系统虚拟控制律和自适应律为:

(15)
(16)

(17)

由第n阶子系统动态方程可知:
(18)
式中uci即为最终待设计输入控制律.
根据故障模型(6),Ci,uki和ρi均为未知参数,故障参数uki和ρi随着故障类型及发生故障执行器数量的变化而变化.设计如下自适应控制律:
(19)
其中Q为m+1维已知参数向量,取为
P为描述系统未知非线性和未知执行器故障情况的参数向量,设计自适应律估计其真实值,自适应律取为
(20)
定理1 考虑由状态方程(1),具有滞回非线性特性执行器(2),执行器未知故障模型(5)组成的不确定非线性闭环系统,在假设1~3条件下,基于Backstepping变结构原理设计的控制律(18)和自适应律(17)、(20),能够使得系统输出跟踪参考指令信号,且闭环系统所有信号半全局一致最终有界.

式中i=1,2,…,m.
在时间区间[T0,T1)内,定义如下Lyapunov函数:

Vn0按时间t的导数为

在[T0,T1)内没有故障发生,即ρi=1,uki=0,可知:
由自适应律(20)和虚拟控制表达式(17)可知,en的导数可重写为

由式(14),自适应律(17)和引理1,可以得到:

(21)
将自适应律(17)代入得

由式(18)可知
由式(17),(18)和自适应律(20)可知,en的导数为

(22)
将自适应律(20)代入得
(23)




(24)
由式(23)可知
(25)

由式(8)和式(24)可得时刻Tr跟踪误差为

可知,Vnr(t)最终有界,且存在上界为λ2/λ1.通过增大控制器增益ki(i=1,2,…,n)和参数ηi(i=1,2,…,n)的值可以使得上界λ2/λ1任意小,从而使得跟踪误差e1=x1-yr任意小.
3 仿真算例
为验证控制器的有效性,考虑如下3阶不确定非线性系统:

滞回非线性模型参数设置为
A1=A2=1,B1=B2=3.163 5,C1=C2=0.345.
选取如下高斯函数作为RBF神经网络的径向基函数:

式中,μi=[μi1,…,μin]T,i=1,…,l为高斯函数的中心,σi,i=1,…,l为高斯函数的宽度.
选择控制律设计参数为:Γ1=Γ2=Γ3=diag[0.5],ΓP=diag[1.0],γ1=γ2=γ3=0.5,k1=k2=2,k3=5.假设在t=10 s时,执行器v1发生卡死故障,且卡死位置为vk1=4.
图2为系统输出跟踪参考指令信号性能曲线,由图2可知在执行器存在滞回非线性且发生卡死故障情况下系统输出依然能够有效跟踪参考指令信号.

图2 系统输出跟踪参考指令信号曲线
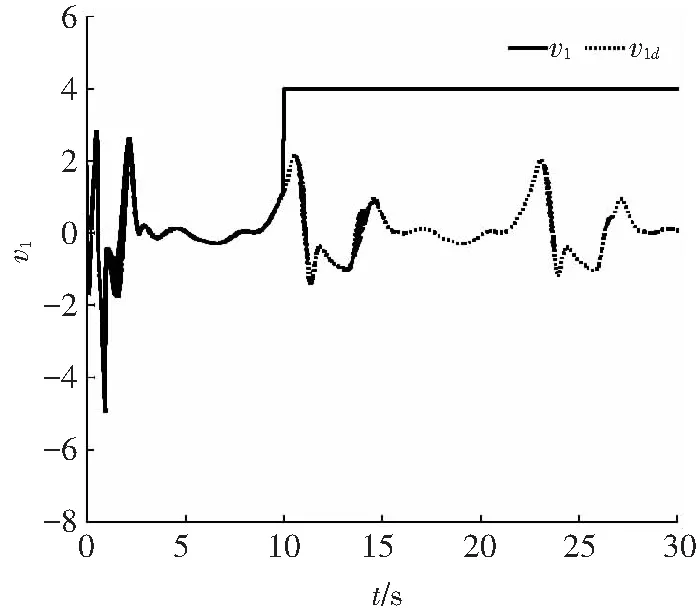
图3 执行器v1曲线

图4 执行器v2曲线
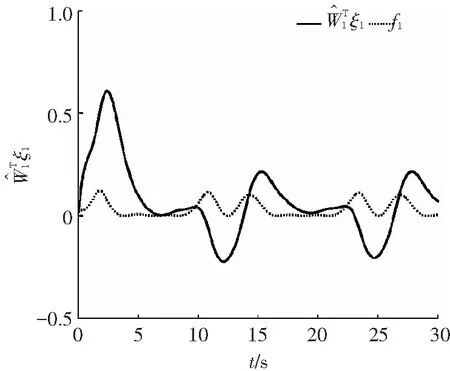
图5 神经网络ξ1逼近曲线

图6 神经网络ξ2逼近曲线
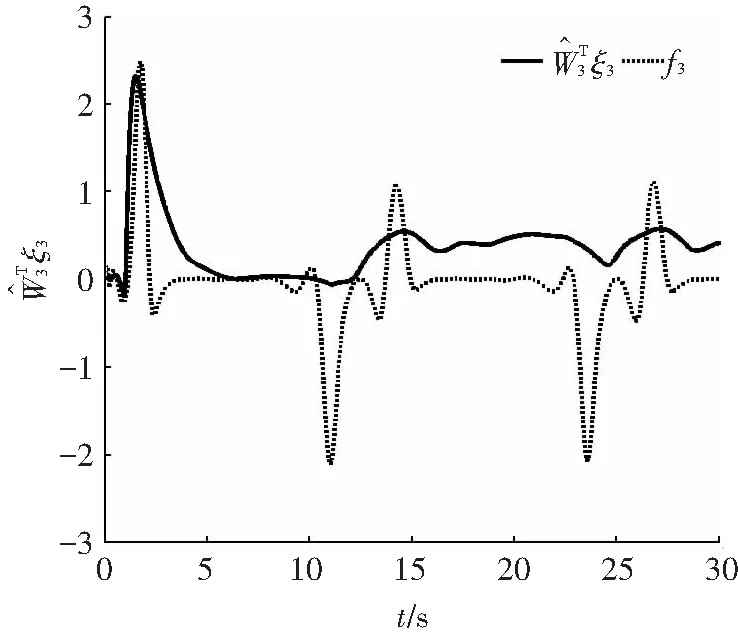
图7 神经网络ξ3逼近曲线




图9 边界估计值3自适应变化曲线
4 结 论
1)建立了含有滞回非线性的执行器未知故障模型,并将滞回非线性部分作为系统未知干扰项的一部分,便于控制律的设计.
2)借鉴动态面控制思想,在Backstepping控制推导过程中引入一阶滤波器,避免对虚拟控制项的直接求导,简化了计算.
3)通过RBF神经网络和自适应补偿项可以有效消除系统建模过程中非线性函数不确定和外界未知干扰的影响.
4)设计的鲁棒自适应控制器可以有效保证具有滞回非线性执行器发生故障时闭环系统信号有界,实现对参考指令信号的跟踪.理论分析和仿真结果证明了该方案的有效性.
[1] 郭咏新, 张臻, 毛剑琴, 等. 超磁致伸缩作动器的率相关Hammerstein建模与H鲁棒跟踪控制[J]. 自动化学报,2014,40(2):197-207.DOI:10.3724/SP.J.1004.2014.00197.GUOYongxin,ZHANGZhen,MAOJianqin,etal.Rate-dependentHammersteinmodelandH∞robusttrackingcontrolofgiantmagnetostrictiveactuators[J].ActaAutomaticaSinica, 2014,40(2):197-207.DOI:10.3724/SP.J.1004.2014.00197.
[2] CAI Jianping, WEN Changyun, SU Hongye. Robust adaptive failure compensation of hysteretic actuators for a class of uncertain nonlinear systems[J]. IEEE Transactions on Automatic Control, 2013, 58(9): 2388-2394. DOI: 10.1109/TAC.2013.2251795.
[3] LI Wei, CHEN Xuedong. Compensation of hysteresis in piezoelectric actuators without dynamics modeling[J]. Sensors and Actuators A: Physical, 2013, 199(2):89-97. DOI: 10.1016/j.sna.2013.04.036.
[4] 柳萍, 毛剑琴, 张伟, 等. 基于Hammerstein-like模型的超磁致伸缩作动器建模与控制[J]. 北京航空航天大学学报, 2013, 39(7): 917-921. DOI:10.13700/j.bh.1001-5965.2013.07.014. LIU Ping, MAO Jianqin, ZHANG Wei, et al. Modeling and control of giant magnetostrictive actuators based on Hammerstein-like model[J]. Journal of Beijing University of Aeronautics and Astronautics, 2013, 39(7): 917-921. DOI:10.13700/j.bh.1001-5965.2013.07.014.
[5] 刘星, 夏品奇. 磁流变弹性体隔振器的非线性滞回动力学模型[J]. 南京航空航天大学学报, 2016, 48(2): 268-273. LIU Xing, XIA Pinqi. Nonlinear hysteresis dynamic model of magnetorheological elastomer isolator[J].Journal of Nanjing University of Aeronautics & Astronautics, 2016, 48(2): 268-273.
[6] 刘棕成, 董新民, 薛建平等. 一类不确定执行器非线性系统的自适应控制[J]. 系统工程与电子技术, 2015, 37(1): 163-168. DOI:10.3969/j.issn.1001-506X.2015.01.26. LIU Zongcheng, DONG Xinmin, XUE Jianping, et al. Adaptive control for a class of nonlinear systems with uncertain actuator nonlinearity[J]. Systems Engineering and Electronics, 2015, 37(1): 163-168. DOI:10.3969/j.issn.1001-506X.2015.01.26.
[7] 周卫东, 廖成毅, 郑兰,等. 具有未知死区的SISO非仿射非线性系统间接自适应模糊控制[J]. 哈尔滨工业大学学报, 2014, 46(10):110-116. DOI:10.11918/j.issn.0367-6234.2014.10.019. ZHOU Weidong, LIAO Chengyi, ZHENG Lan, et al. Indirect adaptive fuzzy control for SISO nonaffine nonlinear system with unknown dead-zone input[J]. Journal of Harbin Institute of Technology, 2014, 46(10):110-116. DOI:10.11918/j.issn.0367-6234.2014.10.019.
[8] ZHANG Xiuyu, LIN Yan, MAO Jianqin. A robust adaptive dynamic surface control for a class of nonlinear systems with unknown Prandtl-Ishilinslzi hysteresis[J]. International Journal of Robust and Nonlinear Control, 2011, 21(13): 1541-1561. DOI: 10.1002/rnc.1652.
[9] ZHANG Xiuyu, LIN Yan. Adaptive control for a class of nonlinear time-delay systems preceded by unknown hysteresis[J]. International Journal of Systems Science, 2013, 44(8): 1468-1482. DOI: 10.1080/00207721.2012.659690.
[10]LIU Yonghua, FENG Ying, CHEN Xinkai. Robust adaptive dynamic surface control for a class of nonlinear dynamical systems with unknown hysteresis[J]. Abstract and Applied Analysis, 2014: 1-10. DOI:10.1155/2014/640249.
[11]CAI Jianping, WEN Changyun, SU Hongye, et al. Robust adaptive failure compensation of hysteretic actuators for parametric strict feedback systems[C]//Proceedings of the 50th IEEE Conference on Decision and Control and European Control Conference. Orlando, FL: IEEE, 2011, 7988-7993. DOI: 10.1109/CDC.2011.6160674.
[12]WEN Changyun, ZHOU Jing. Decentralized adaptive stabilization in the presence of unknown backlash-like hysteresis[J]. Automatica, 2007, 43(3): 426-440. DOI: 10.1016/j.automatica.2006.10.012.
[13]GUPTA M M, RAO D H. Neuro-Control Systems: Theory and Applications[M]. New York: IEEE Press,1994.
[14]BECERRA H M, LPEZ-NICDS G, SAGÜÉS C. A sliding-mode-control law for mobile robots based on epipolar visual serving form three views[J].IEEE Transactions on Robotics, 2011, 27(1):175-183. DOI: 10.1109/TRO.2010.2091750.
[15]王坚浩, 胡剑波. 非线性执行器死区故障的鲁棒自适应控制[J]. 系统工程与电子技术, 2012, 34(1): 142-148.DOI: 10.3969/j.issn.1001-506X.2012.01.27. WANG Jianhao, HU Jianbo. Robust adaptive control of nonlinear systems with actuator dead-zone fault[J]. Systems Engineering and Electronics, 2012, 34(1): 142-148.DOI: 10.3969/j.issn.1001-506X.2012.01.27.
(编辑 张 红)
Backstepping sliding mode control for a class of nonlinear systems with hysteresis failures
LI Fei1,HU Jianbo2,WANG Jianhao2,ZHENG Lei2
(1.Science College, Air Force Engineering University, Xi’an 710051, China; 2.Materiel Management and Safety Engineering College, Air Force Engineering University, Xi’an 710051, China)
An adaptive backstepping sliding mode control method is adopted to solve the control problem of uncertain nonlinear systems with unknown actuator failures. A model for the nonlinear actuator is developed which includes hysteresis nonlinearity, partial loss of effectiveness and total loss of effectiveness. Radial basis function neural network is employed to approximate the unknown nonlinear functions, and the parameters of neural network are tuned on-line by adaptation laws to improve the effect of approximation. The dynamic surface control is combined with backstepping control to avoid the explosion of complexity in the traditional backstepping design method. The influence of modeling error and uncertain disturbances is suppressed by introducing the adaptive compensation term. The closed loop system is proved to be semi-globally uniformly ultimately bounded by theoretical analysis. Simulation results are presented to demonstrate the effectiveness of this method.
hysteresis nonlinearity; unknown faults; uncertainties; adaptive backstepping control; RBF neural network
10.11918/j.issn.0367-6234.201503083
2015-03-21
工业控制技术国家重点实验室资助 (ICT1401);上海市重点学科建设资助(No.J50103)
李 飞(1986—),男,博士,讲师; 胡剑波(1965—),男,教授,博士生导师
李 飞,lizhaodi726@163.com
TP273
A
0367-6234(2017)04-0108-08
猜你喜欢
新技术新工艺(2022年3期)2022-04-02
中学生数理化(高中版.高二数学)(2021年4期)2021-07-20
E动时尚·科学工程技术(2019年6期)2019-09-10
制造技术与机床(2019年8期)2019-09-03
绿色科技(2019年10期)2019-06-17
制造技术与机床(2017年9期)2017-11-27
数学大世界·中旬刊(2017年3期)2017-05-14
高中生学习·高三版(2016年9期)2016-05-14
自动化学报(2016年8期)2016-04-16
自动化学报(2016年5期)2016-04-16
