
弹齿滚筒式捡拾器捡拾性能试验
2017-04-19 09:07郁志宏王文明莫日根毕力格刘伟峰崔红梅
农业机械学报 2017年3期
郁志宏 王文明 莫日根毕力格 刘伟峰 李 林 崔红梅
(1.内蒙古农业大学机电工程学院, 呼和浩特 010018; 2.邢台职业技术学院机电工程系, 邢台 054035)
弹齿滚筒式捡拾器捡拾性能试验
郁志宏1王文明2莫日根毕力格1刘伟峰1李 林1崔红梅1
(1.内蒙古农业大学机电工程学院, 呼和浩特 010018; 2.邢台职业技术学院机电工程系, 邢台 054035)
在弹齿滚筒式捡拾器试验台上,以紫花苜蓿为捡拾对象,滚筒转速、机器前进速度和牧草含水率为试验因素,功率消耗与捡拾损失率作为性能检测指标,进行了正交试验和弹齿端部加速度试验,旨在探索弹齿滚筒式捡拾器的工作参数、结构参数与牧草收获条件对捡拾性能的影响。试验结果表明:凸轮廓线对捡拾器工作性能有较大影响;滚筒转速和牧草含水率均对捡拾器工作性能影响极显著,机器前进速度对工作性能影响显著;捡拾器工作性能的影响因素主次顺序为滚筒转速、牧草含水率、机器前进速度,最佳性能参数组合为滚筒转速42 r/min、机器前进速度4.0 km/h、牧草含水率15.1%。弹齿端部加速度频谱分析表明:在滚筒转速、机器前进速度保持一定的情况下,随着牧草含水率的增加,弹齿端部加速度呈上升趋势,捡拾器功率消耗增加,捡拾效率下降。
弹齿滚筒式捡拾器; 工作性能; 影响因素; 试验
引言
弹齿滚筒式捡拾器是捡拾压捆机及收获机械关键部件之一,其捡拾性能直接影响捡拾压捆机的捡拾质量,对整机性能也有影响[1-2],滚筒转速和机器前进速度是影响弹齿滚筒式捡拾器捡拾质量的主要工作参数。不同牧草储运方式对收获牧草含水率有不同的要求,研究牧草含水率对捡拾性能的影响,以确定不同牧草含水率条件下的捡拾器工作参数匹配关系,可为捡拾器的研发制造和使用提供技术支持和理论依据。国外学者对捡拾压捆机的研究多集中在整机性能的综合研究上[3-4],国内学者也对弹齿滚筒式捡拾器作过相关理论分析和试验研究,但是引入牧草含水率对弹齿滚筒式捡拾器捡拾质量进行研究较少[5-17]。
前期课题组根据捡拾要求,优化设计了试验台以及控制弹齿运动的凸轮轨道廓线[18-20]。本文以牧草含水率、滚筒转速和机器前进速度为试验参数,利用原机凸轮轨道和课题组前期优化设计的凸轮轨道进行性能对比试验,旨在探究弹齿滚筒式捡拾器的工作参数(滚筒转速、机器前进速度)、结构参数(凸轮廓线)与牧草收获条件(含水率)对捡拾性能的影响。
1 试验装置及工作机理
1.1 试验装置
弹齿滚筒式捡拾器试验台结构如图1所示。主要由弹齿滚筒式捡拾器、输送带、集草箱、草条车、草条车轨道和动力输送部分等组成。本试验以弹齿滚筒式捡拾器对草条车的相对运动模拟捡拾器在草场地面上的运动。弹齿滚筒式捡拾器按一定转速运转,将铺有草条的草条车按一定速度在轨道上移动至滚筒捡拾器底部,弹齿接触草条,将其捡拾升运,抛送至输送带,最后运送至集草箱。

图1 捡拾器试验台三维图Fig.1 3D model of test bench of spring-finger cylinder pickup collector1.链传动 2.电动机 3.扭矩传感器 4.胶带传动 5.集草箱 6.带式输送器 7.滚筒捡拾器 8.后侧护板 9.草条车
1.2 工作机理
弹齿滚筒式捡拾器试验台工作时,电动机驱动主轴旋转,通过链传动传递动力至滚筒,使滚筒转动弹齿随凸轮轨道廓线形状而运动,铺有草条的草条车在另一电动机的驱动下在轨道上直线运动,当草条车运动到滚筒下方时,滚筒上的弹齿接触牧草,从而完成对牧草的捡拾,最后带式输送器将牧草输送至集草箱。
1.3 凸轮运动规律
捡拾器凸轮轨道按工作阶段分为放齿、升运、收齿3个工作区域,如图2所示,以极坐标中基圆中心为原点,凸轮转角为φ,以x轴为始边,根据捡拾器运动方向,顺时针方向转动,得到捡拾器的凸轮运动各工作阶段示意图,r为弹齿端部回转半径。

图2 凸轮运动规律Fig.2 Motion law of cam1.凸轮轨道轮廓 2.弹齿 3.弹齿端部运动轨迹
根据对弹齿运动的要求,凸轮运动3个阶段变化情况如下:
(1)放齿阶段:弹齿快速伸入草层进行牧草捡拾。此时弹齿由基圆处开始,转到滚筒下方并转过一定角度,弹齿伸长至滚筒外达到最大尺寸。
(2)升运阶段:弹齿将捡拾起的草条平稳升运,此时弹齿伸出长度不变。
(3)收齿阶段:弹齿运动到滚筒上方,向后抛送草条,并开始收齿。随之弹齿向后呈现倾斜,起到向后抛送草条的作用;最后弹齿运动到垂直状态,快速回缩进滚筒的护板内。
1.4 优化前后的捡拾器凸轮轨道
1.4.1 优化前凸轮轨道
优化前的捡拾器凸轮是9KJ- 1.4A型压捆机上的捡拾器凸轮,如图3所示,其轨道廓线形似豆形,但捡拾器凸轮设计机理并不清晰。

图3 优化前凸轮轨道Fig.3 Original cam
凸轮廓线形状决定了弹齿端部的运动轨迹,课题组前期研究分析发现,其弹齿端部水平分速度和垂直分速度变化趋势较为合理,但弹齿接触牧草时线速度略大,会加大对牧草的冲击作用;弹齿运动过程中加速度有突变,且数值较大,这会造成使用过程中滚轮对滑道的冲击力较大,工作不平稳[12,18],说明优化前的凸轮廓线存在一定的缺陷。
1.4.2 优化后凸轮轨道
课题组在研究多种不同类型捡拾器凸轮轨道曲线的基础上,对凸轮轨道廓线进行了优化设计。优化后的凸轮廓线设计机理清晰[18],基本解决了原凸轮廓线下弹齿运动所存在的问题。优化后的凸轮轨道如图4所示,优化前后凸轮机构结构参数如表1所示。

图4 优化后凸轮轨道Fig.4 Improved cam表1 优化前后凸轮机构结构参数Tab.1 Design parameters for cam mechanism

参数 优化后优化前弹齿杆数量z55滚筒半径R/mm125.0163.0曲柄长度l1/mm80.0114.0弹齿长度l2/mm178.0202.0弹齿与曲柄夹角γ/rad1.100.48滚子半径r/mm17.517.5基圆半径R0/mm58.079.0
2 试验内容与方法
2.1 试验材料
试验材料为紫花苜蓿,购自内蒙古蒙草有限公司,初始含水率45%。
2.2 试验仪器与设备
图5为弹齿滚筒式捡拾器试验台,图6为传感器布置图,图7为捡拾器试验台测试系统,由功耗测试系统和加速度测试系统组成。功耗测试系统由JN338型转矩转速传感器及N-338M-A型转矩转速测量仪组成,加速度测试系统由52-0050-02-360-XY型无线加速度传感器、无线网关及计算机组成,试验台草条车的前进速度由CNT800-4T0075G 型多功能全数字式变频器控制,滚筒转速由VARISPEED-616G5型变频器控制。

图5 试验台Fig.5 Test bench

图6 无线加速度传感器布置Fig.6 Wireless acceleration sensor arrangement

图7 试验台测试系统布置图Fig.7 Test system arrangement plan of spring-finger cylinder pickup collector test bench1.计算机 2.无线网关 3.电动机1 4.变频器1 5.控制柜1 6.滚筒 7.输送带 8.联轴器 9.电动机2 10.变频器2 11.控制柜2 12.转矩转速传感器 13.集草箱 14.转速转矩测量仪 15.JN338型转速转矩测量仪 16.滚轮 17.凸轮轨道 18.弹齿 19.无线加速度传感器
2.3 试验设计
2.3.1 试验性能指标
捡拾器捡拾损失率为捡拾器在捡拾过程当中漏捡部分质量占测定地段上的被捡牧草全部质量的百分比。
捡拾器损失率为
(1)
式中Sj——损失率,%L——测定长度,mWj——捡拾器漏拾牧草质量,gPt——每米草条质量,kg/m
捡拾器功率消耗为
(2)
式中N——功率,kWM——工作部件主传动轴扭矩,N·mn1——工作部件主传动轴转速,r/min
2.3.2 单因素试验
弹齿滚筒式捡拾器的工作质量主要取决于弹齿端部的运动轨迹。弹齿运动为前进运动、相对于滚筒的转动和摆动3个运动的合成。在凸轮轨道廓线一定的情况下,滚筒转速和机器前进速度是影响捡拾质量的主要因素[12,18]。将牧草含水率作为试验因素之一,以探寻牧草收获条件对捡拾性能的影响。选取滚筒转速、机器前进速度和牧草含水率3个因素进行重复3次的单因素试验。
弹齿滚筒式捡拾器实际工作时,机器前进速度为4~8 km/h,滚筒转速为40~90 r/min,紫花苜蓿在田间收割,晾晒后含水率一般在15%~25%之间。因素水平在此范围之间选取,以捡拾器功率消耗和捡拾损失率为试验指标。
(1)滚筒转速
紫花苜蓿样品的含水率保持在23%,并保持机器前进速度5 km/h,研究不同的滚筒转速(42、50、60、70、81 r/min)对捡拾性能的影响。
(2)机器前进速度
紫花苜蓿样品的含水率保持在23%,并保持滚筒转速,其数值选取以上单因素试验结果中较优的滚筒转速,研究不同的机器前进速度(3.5、4.0、5.0、6.0、7.0 km/h)对捡拾性能的影响。
(3)牧草含水率
保持滚筒转速和机器前进速度不变,其数值采用前 2 次单因素试验结果中较优数值,研究不同牧草含水率(15.1%、17.3%、19.8%、22.3%、24.9%)条件下对捡拾性能的影响。
2.3.3 正交试验
选取单因素试验的较优因素水平进行凸轮轨道改进前后的对比正交试验,研究凸轮轨道以及滚筒转速、机器前进速度和牧草含水率3个因素对捡拾器功率消耗和捡拾损失率的影响,并找出各参数的主次影响关系和较优组合。
2.3.4 弹齿端部加速度试验
根据捡拾器工作要求,弹齿端部过高的加速度会影响捡拾器工作平稳性,使牧草花叶脱落,破损损失变大,影响捡拾效率。运用频谱分析技术,对弹齿端部加速度进行研究。
3 试验结果与分析
3.1 单因素试验
单因素试验结果如图8~10所示,其中捡拾器功率消耗与捡拾损失率为3次重复试验的平均值。
3.1.1 滚筒转速对捡拾性能的影响
由图8可知,当牧草含水率和机器前进速度一定时,滚筒转速越高,损失率越大,捡拾器功耗也相应明显增加。凸轮优化前后相比,功耗相差不大,优化后在最低转速和最高转速下的损失率更低。因此,满足低损失率且低功耗运行的条件是,在前进速度不变的情况下,滚筒转速尽量要小,从而有效地避免因打掉茎叶和花瓣而增大损失率。综合功率消耗与损失率2项指标,选出较优的滚筒转速为42、50、60 r/min。

图8 滚筒转速与功耗、损失率关系曲线Fig.8 Relation curves between cylinder rotational speed and power consumption and leakage collecting rate
3.1.2 机器前进速度对捡拾性能的影响
保持紫花苜蓿样品含水率为 23%,并保持滚筒转速60 r/min,研究机器前进速度(3.5、4.0、5.0、6.0、7.0 km/h)对捡拾性能的影响。
由图9可知,当牧草含水率和滚筒转速一定时,机器前进速度越高,因快速冲击牧草使得损失率越来越大,功率消耗也相应增加。总体上,凸轮优化后的捡拾器功率消耗比优化前稍大,但损失率明显减小,因此,在满足减少损失率的前提下机器前进速度不宜过高。综合功率消耗和损失率2个性能指标,选择较优的机器前进速度为3.5、4.0、5.0 km/h。

图9 机器前进速度与功耗、损失率关系曲线Fig.9 Relation curves between forward speed and power consumption and leakage collecting rate
3.1.3 牧草含水率对捡拾性能的影响
选机器前进速度5.0 km/h,滚筒转速60 r/min,进行单因素试验。
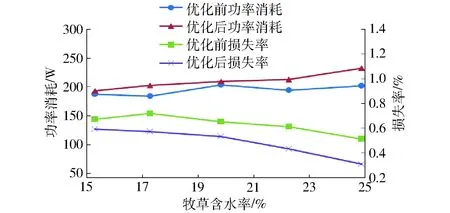
图10 牧草含水率与功耗、损失率关系曲线Fig.10 Relation curves between moisture content and power consumption and leakage collecting rate
由图10可知,当滚筒转速和机器前进速度一定时,含水率越高,损失率越小,功率消耗却有所增加。凸轮优化后捡拾器的损失率降低,但优化前后相差不大。所以主要考虑功率消耗,选取较优含水率为15.1%、17.3%、22.3%。
3.2 正交试验
综合单因素试验结果,在不考虑交互作用的情况下,进行L9(33)正交试验,研究滚筒转速(A)、机器前进速度(B)、牧草含水率(C)对捡拾过程中功率消耗与损失率的影响。试验因素水平如表2所示。

表2 正交试验因素水平Tab.2 Factors and levels of orthogonal test
3.2.1 试验结果
试验数据及初步处理后的结果如表3所示。
对试验结果进行极差分析,极差越小,说明该因素对试验指标的影响越小。空列D的极差均远小于因素A、B、C的极差,可知因素间的交互作用对试验指标功耗和损失率的影响不明显,可以不考虑。
通过极差可知,凸轮优化前捡拾器功耗和损失率的影响因素主次顺序均为A、B、C,凸轮优化后捡拾器功耗和损失率的影响因素主次顺序均为A、C、B。分析得知捡拾器工作性能影响因素主次顺序不同的原因是由于凸轮轨道改变导致的,说明凸轮轨道廓线是影响捡拾器工作性能的主要结构参数。故此后只对凸轮优化后的捡拾器性能进行分析。
由表3得知:在评定捡拾器牧草损失率指标时,优组合为A3B2C3,即滚筒转速为60 r/min、机器前进速度为4.0 km/h、牧草含水率为22.3%时,牧草损失率小。在评定捡拾器功率消耗指标时,优组合为A1B2C1,即滚筒转速为42 r/min、机器前进速度为4.0 km/h、牧草含水率为15.1%时,功率消耗小。
3.2.2 试验数据的方差分析
凸轮优化后的捡拾器方差分析结果如表4所示。从显著水平P值看,滚筒转速A和牧草含水率C对损失率和功耗的影响均为极显著,机器前进速度B对损失率和功耗的影响显著。捡拾器性能影响因素的主次顺序依次为滚筒转速、牧草含水率、机器前进速度。通过对试验数据进行整理和分析,研究得出 2 个试验指标的 2 组较优组合,即:A1B2C1和A3B2C3。
在漏检率满足国家标准要求的前提下,侧重考察因素对功耗的影响效果,从极差分析与方差分析可以得出:最佳性能参数组合为A1B2C1,即滚筒转速42 r/min、机器前进速度4.0 km/h、牧草含水率15.1%。
3.3 弹齿端部加速度频谱分析
根据正交试验得到的机器前进速度与滚筒转速的较优组合,机器前进速度为4.0 km/h、滚筒转速为42 r/min,在牧草含水率分别为15.1%、17.3%和22.3%时,进行捡拾过程中弹齿端部加速度频谱分析。
采用无线加速度传感器采集弹齿端部加速度数据,根据BeeData数据处理软件采集数据,经过频谱分析,生成加速度对频率关系曲线如图11所示。
从图11可以看出,当牧草含水率分别为15.1%、17.3%、22.3%时,弹齿端部加速度峰值出现在放齿捡拾阶段,峰值分别为0.783、0.826、1.006 m/s2。
由于弹齿对草条作用力的结果,在弹齿放齿阶段开始与牧草接触时引起其端部加速度突变,出现峰值;升运过程速度较平稳,弹齿端部加速度有波动但变化不大;在收齿阶段弹齿下降较快,从而又引起弹齿加速度变化,但由于弹齿不受草条作用力的影响,因此不会出现加速度峰值。
以上分析结果表明随着牧草含水率增加,弹齿端部加速度呈上升趋势,导致捡拾器功率消耗增加,捡拾效率下降。

表3 正交试验结果Tab.3 Results of orthogonal test
注:K1、K2、K3表示因素每个水平下的损失率之和。F1、F2、F3表示因素每个水平下的功率消耗之和。
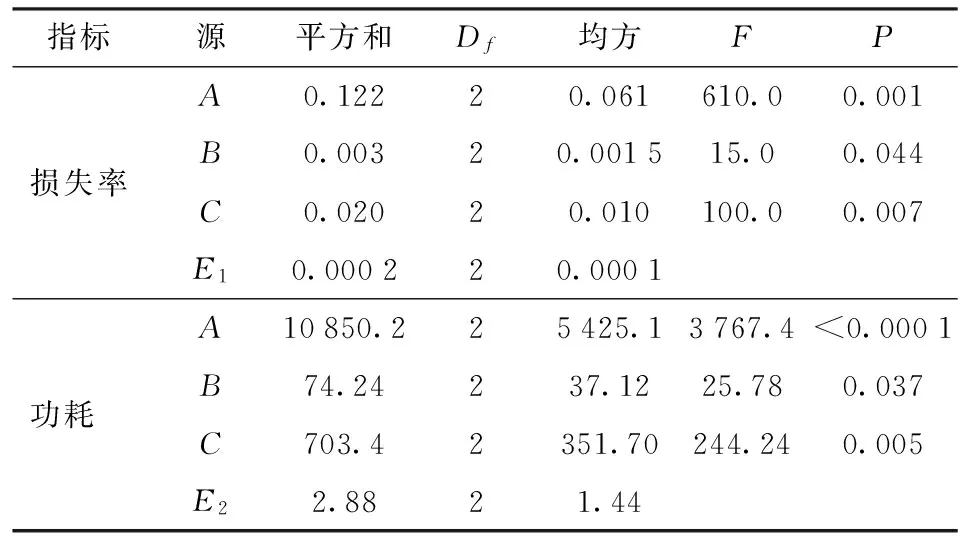
表4 方差分析Tab.4 Variance analysis
注:F0.01(2,2)=99;F0.05(2,2)=19;F0.1(2,2)=9。
4 结论
(1)凸轮优化前捡拾器捡拾性能影响因素的主次顺序为滚筒转速、机器前进速度、牧草含水率;凸轮优化后捡拾器性能影响因素的主次顺序为滚筒转速、牧草含水率、机器前进速度;因凸轮轨道变化导致的工作性能影响因素顺序的不同,说明凸轮轨道廓线是影响捡拾器工作性能的主要结构参数。
(2)滚筒转速、和牧草含水率均对捡拾器工作性能影响极显著,机器前进速度对工作性能影响显著。最佳性能参数组合为滚筒转速42 r/min、机器前进速度4.0 km/h、牧草含水率15.1%。

图11 频谱分析Fig.11 Spectral analysis
(3)当滚筒转速与机器前进速度保持一定时,随着牧草含水率增加,弹齿端部加速度呈上升趋势,导致捡拾器功率消耗增加,捡拾效率下降。进一步说明进行弹齿滚筒式捡拾器工作性能理论研究和实际生产时,应充分考虑牧草含水率的影响作用。
1 杨世昆,苏正范.饲草生产机械与设备[M].北京:中国农业出版社,2009.
2 麻硕士.草原牧区畜牧业机械化发展战略研究[J].农村牧区机械化,2008,78(5):11.
3 BORTOLINI Marco, CASCINI Alessandro, GAMBERI Mauro. Sustainable design and life cycle assessment of an innovative multi-functional haymaking agricultural machinery[J].Journal of Cleaner Production,2014,82:23-36.
4 LANGER T H, EBBESEN M K, KORDESTANI A. Experimental analysis of occupational whole-body vibration exposure of agricultural tractor with large square baler[J]. International Journal of Industrial Ergonomics,2015,47:79-83.
5 盛凯. 弹齿滚筒捡拾器运动参数的解析分析[J].吉林工学院学报,1989,10(3):26-33. SHENG Kai.Analysis of movement parameters of spring-finger cylinder pickups[J].Journal of Jilin Institute of Technology,1989,10(3):26-33. (in Chinese)
6 盛凯,曾南宏. 弹齿滚筒捡拾器的机构特性及其运动数学模型[J].农业机械学报,1991,22(1):51-57. SHENG Kai,ZENG Nanhong.The mechanical feature and motional math model of spring-finger cylinder pickups[J].Transactions of the Chinese Society for Agricultural Machinery,1991,22(1):51-57. (in Chinese)
7 王国权,余群,卜云龙,等.秸秆捡拾打捆机设计及捡拾器的动力学仿真[J].农业机械学报,2001,32(5): 59-61. WANG Guoquan,YU Qun,BU Yunlong,et al.Design of pickup baler and dynamic simulation of pickup roller[J].Transactions of the Chinese Society for Agricultural Machinery,2001,32(5): 59-61.(in Chinese)
8 肖子学. 弹齿滚筒式捡拾装置的参数化设计及运动学仿真研究[D].呼和浩特:内蒙古农业大学,2014. XIAO Zixue.Parametric design and kinematics simulation on spring-finger cylinder pickup collector[D]. Huhhot:Inner Mongolia Agricultural University,2014.(in Chinese)
9 王振华,王德成,刘贵林,等.方草捆压捆机捡拾器参数设计[J].农业机械学报,2010,41(增刊):107-109. WANG Zhenhua,WANG Decheng,LIU Guilin,et al.Pickup parameters design of square baler[J].Transactions of the Chinese Society for Agricultural Machinery,2010,41(Supp.): 107-109. (in Chinese)
10 乌吉斯古楞,刘伟峰,包那日那.滚筒式捡拾器的运动仿真[J].农机化研究,2010,32(9):50-53.
11 乌吉斯古楞.弹齿滚筒式牧草捡拾器运动仿真及性能参数的试验研究[D]. 呼和浩特:内蒙古农业大学,2010. WUJISIGULENG. Simulation and experimental study on performance parameters of spring-tooth grass pickup roller [D].Huhhot:Inner Mongolia Agricultural University,2010.(in Chinese)
12 王文明,王春光. 弹齿滚筒式捡拾装置的研究与发展[J].农机化研究,2012,34(10):221-225.
13 王文明,王春光.弹齿滚筒式捡拾装置参数分析与仿真[J/OL].农业机械学报,2012,43(10):82-89. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20121015&flag=1. DOI:10.6041/j.issn.1000-1298.2012.10.015. WANG Wenming,WANG Chunguang.Parameter analysis and simulation of spring-finger cylinder pickup collector [J/OL].Transactions of the Chinese Society for Agricultural Machinery,2012,43(10): 82-89.(in Chinese)
14 BAI Xuewei,ZHAO Ping,LI Yongkui,et al. Model analysis of a type of square baler’s framework[C]∥Proceedings of 2011 International Conference on Electronic and Mechanical Engineering and Information Technology, 2011,4:1769-1772.
15 尹建军,刘丹萍,李耀明.方捆机捡拾器高度自动仿形装置的参数分析与试验[J/OL].农业机械学报,2014,45(8):86-92. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20140814&journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2014.08.014. YIN Jianjun,LIU Danping,LI Yaoming. Design and parameters analyses of automatic height profiling device of quadrate-bale baler pickup[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2014,45(8):86-92. (in Chinese)
16 王文明,王春光,郁志宏. 弹齿滚筒式捡拾装置捡拾过程的高速摄像分析[J].农机化研究,2013,35(7):160-163.
17 丁海泉,郁志宏,刘伟峰,等. 弹齿滚筒式捡拾装置运动学特性的理论分析[J].农机化研究,2015,37(10):76-78.
18 乌吉斯古楞,刘伟峰,周伟,等.优化设计滚筒式捡拾器实验台[J].内蒙古农业大学学报,2010,31(3):227-230. WUJISIGULENG, LIU Weifeng, ZHOU Wei,et al. Develop the test-bed of the roller pickup [J].Journal of Inner Mongolia Agricultural University,2010,31(3):227-230. (in Chinese)
19 王文明,邓伟刚,郁志宏,等. 弹齿滚筒式捡拾器试验台的设计[J].内蒙古农业大学学报,2015,36(3):88-92. WANG Wenming,DENG Weigang,YU Zhihong,et al. Design on spring-finger cylinder pickup collector test bench[J].Journal of Inner Mongolia Agricultural University,2015,36(3):88-92.(in Chinese)
20 王文明. 弹齿滚筒式捡拾装置参数分析和优化设计研究[D]. 呼和浩特:内蒙古农业大学,2012. WANG Wenming.Parameter analysis and improving design of spring-finger cylinder pickup collector [D]. Huhhot:Inner Mongolia Agricultural University,2012.(in Chinese)
Experiment on Performance of Spring-finger Cylinder Pickup Collector
YU Zhihong1WANG Wenming2Morigenbilige1LIU Weifeng1LI Lin1CUI Hongmei1
(1.CollegeofElectricalandMechanical,InnerMongoliaAgriculturalUniversity,Huhhot010018,China2.DepartmentofElectricalandMechanicalEngineering,XingtaiVocationalandTechnicalCollege,Xingtai054035,China)
Cylinder rotational speed and forward speed are two main working parameters of spring-finger cylinder pickup collector. Harvesting, different ways of storage and transportation also have forage moisture content requirements. Through researching the influence law of forage moisture content and working parameters on the pickup collector collecting performance, the pickup performance index of optimal parameter combination can be got, and it can be used to guide the actual production and provide technical support and theoretical basis for pickup collector design and manufacturing. For collecting alfalfa, taking cylinder rotational speed, machine forward speed and forage moisture content as test factors, taking power consumption and leakage rate of picking up as performance index, orthogonal experiments were done on the original device of spring-finger pickup cylinder collector and the improved convex contour line device at the same time. Through the orthogonal experiment and the spring-finger end of acceleration experiment, effects of the three factors on collecting performance were analyzed. Levels of orthogonal test factors were selected from single factor experiment results, namely the machine forward speed of 3.5 km/h, 4.0 km/h and 5.0 km/h, cylinder rotational speed of 42 r/min, 50 r/min and 60 r/min, forage moisture content of 15.1%, 17.3% and 22.3%. The test results showed that the CAM track had greater influence on collecting performance, the cylinder rotational speed and forage moisture content had extremely significant effects on working performance, the machine forward speed had influence on working performance. The affecting sequence of importance for three factors on power consumption and leakage collecting rate were cylinder rotational speed, forage moisture content and machine forward speed. When cylinder rotational speed was 42 r/min, forage moisture content was 15.1%,and machine forward speed was 4.0 km/h, the collecting performance of the pickup collector was the best.Through the spectrum analysis, it was concluded that the spring-finger end acceleration was increased with the increase of forage moisture content, power consumption was increased and pickup leakage rate was declined with the increase of forage moisture content. It would lay research foundation for the spring-finger pickup cylinder collector to match the optimal working parameters and structure parameters and collecting performance for the future.
spring-finger cylinder pickup collector; working performance; impact factors; experiment
10.6041/j.issn.1000-1298.2017.03.013
2016-11-10
2017-01-15
国家自然科学基金项目(51365035)和河北省自然科学基金项目(E2015108021)
郁志宏(1966—),女,教授,主要从事农业机械智能检测技术与装置研究,E-mail: yzhyqyzhyq@163.com
S225.2+3
A
1000-1298(2017)03-0106-07
猜你喜欢
幼儿教育(2022年10期)2022-10-28
科学技术创新(2022年24期)2022-08-06
有色冶金节能(2022年1期)2022-03-11
今日农业(2021年1期)2021-11-26
幼儿教育·父母孩子版(2021年6期)2021-08-05
制造技术与机床(2019年8期)2019-09-03
船海工程(2018年1期)2018-03-01
制造技术与机床(2017年5期)2018-01-19
海外星云(2016年19期)2016-10-24
中国蜂业(2016年3期)2016-09-06
