无人监测船在城市内河水质监测中的应用
2017-04-18 07:01罗刚张然
环境监控与预警 2017年1期
罗刚,张然
(1. 镇江市环境监测中心站,江苏 镇江 212000;2. 珠海云洲智能科技有限公司,广东 珠海 519000)
无人监测船在城市内河水质监测中的应用
罗刚1,张然2
(1. 镇江市环境监测中心站,江苏 镇江 212000;2. 珠海云洲智能科技有限公司,广东 珠海 519000)
采用无人船监测技术结合镇江市内河水质状况普查工作,大于120 h的航行试验,总航行里程约为90 km,对建成区水体中的氨氮(NH3-N)、溶解氧(DO)、氧化还原电位(ORP)和浊度进行原位监测,结果表明,通过合理选择搭载相应的测量电极,无人监测船能够满足地表水测量数据准确度的要求,同时可实现研究区域的监测全覆盖,提升了地表水环境监测的工作效率。
无人船;水环境;原位监测;氨氮;溶解氧;氧化还原电位;浊度
当前,全国水环境形势非常严峻,流经城镇的一些河段污染普遍较重,部分水体甚至产生了黑臭现象,严重影响了周边的生态环境和人们的居住环境。《水污染防治行动计划》[1]提出“到2020年,地级及以上城市建成区黑臭水体均控制在10%以内;到2030年,城市建成区黑臭水体总体得到消除”。
《江苏省水污染防治工作方案》[2]提出“到2020年,地级以上城市建成区黑臭水体基本消除”。城市黑臭水体整治已经成为地方各级人民政府改善城市人居环境工作的重要内容。目前全国大部分城市内河受城市发展的限制,无法充分满足人工监测采样的条件,导致水体监测点位数量不够,覆盖率不足,监测数据不能很客观地反映监测区域的水质污染状况[3-4]。
无人船技术是一种新型的自动化监测平台[5],依托小型船体,利用GPS定位、自主导航和控制设备,根据监测工作的需要可搭载多种水质监测传感器,以人工遥控或者全自动自主导航的工作方式,在航行过程中可到达水体的绝大部分区域,对水体进行连续性原位监测。该系统可应用于城市内河、近海岸、水库甚至海洋等各种类型水体中的多项水质参数的同步监测[6]。同时,无人船技术可在水文测绘、水下探测、水下搜索、水环境应急监测等领域扮演重要角色[7-8]。
现利用国内自主研制的无人船系统,搭载溶解氧(DO)、浊度、氨氮(NH3-N)和氧化还原电位(ORP)在线监测仪器,对镇江市建成区内河流的水质状况进行应用监测。
1 无人船系统
无人船可应用于环保、水文等行业的湖泊、水库、江河、近海等地表水的水质采样监测,尤其在突发环境事件处置时,应急采样监测无人船因其尺寸小、重量轻,可随时装载于车辆后备箱,随车辆在第一时间赶往事发区域,深入污染禁区,按规定的路线和坐标,实现连续多个监测点的在线水质检测和水样采集,并将监测数据实时传输、显示、存储以及绘制水质参数图。图1是无人船监测系统的基本构成。
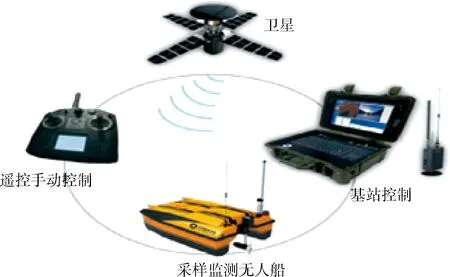
图1 无人船监测系统构成
1.1 无人船平台
采样监测无人船平台的基本构成包括船体、主控单元、导航单元、通讯单元、动力单元和监测单元,各系统主要技术参数见表1。

表1 采样监测无人船平台各单元技术参数
1.2 无人船基站
无人船基站搭配MM70无人船的地面基站软件,具有水质采样设置、采样监控、采样工作报告生成等功能。
1.3 智能遥控器
智能遥控器可人工远距离遥控无人船进行监测活动,遥感活动范围为360°。
2 无人船在城市内河应用
2.1 自动监测
2016年5—6月,利用无人船对镇江市建成区内8条河流水质状况进行普查监测,范围共包括了7条城市内河和1个湖泊,7条内河总长度约为72 km,湖泊总面积约为8.8 km2,监测因子为DO、NH3-N、ORP和浊度。
图2是无人船对其中一条河流——古运河自动监测的GPS航迹测点图。实际操作方法为现场监测前,下载该区域的北斗卫星地图,在地图上将古运河上需测量的点位编辑进入规划好的行驶航线,同时将该点位设置成监测点,无人船执行任务时则会在此任务点上进行原位监测,监测过程中无人船始终处于航行状态。
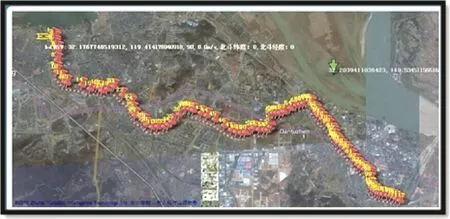
图2 古运河GPS航迹测点
2.2 比对实验
无人船监测时,取样深度为水面下0.5 m,用于原位监测的电极头也置于水面以下0.5 m处,测量频率设置为每5 min测量一次。为掌握无人船监测数据的一致性,选取沿河途中便于人工采样监测的10个点位同时进行实际水样比对实验。比对方法为在无人船经过设定点时通过智能遥控器命令无人船测量该点的水质,同步进行人工监测,深度为水面以下0.5 m处。对DO、浊度和ORP进行原位监测,NH3-N项目采样后送实验室分析。表2为实际水样比对标准,表3为比对实验分析方法。
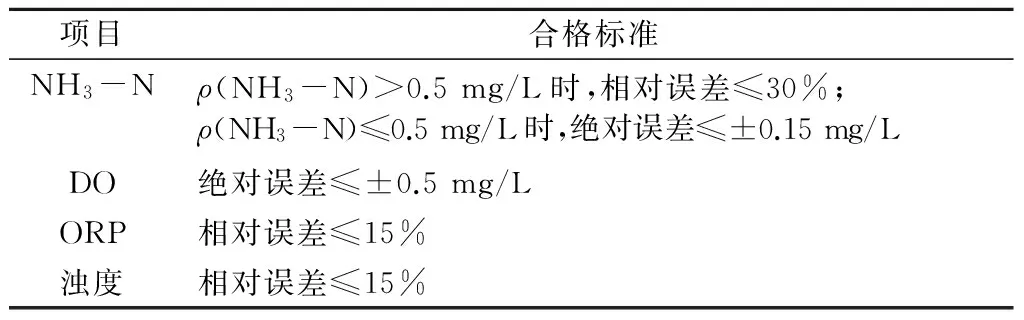
表2 实际水样比对标准
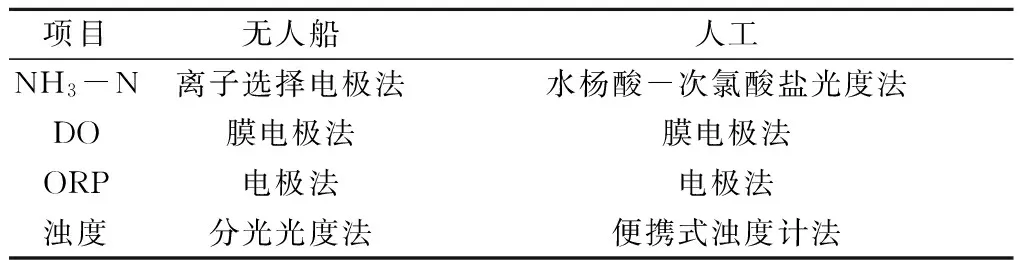
表3 实际水样比对实验分析方法
2.3 数据分析
古运河无人船监测数据见图3,古运河实际水样比对结果见表4。
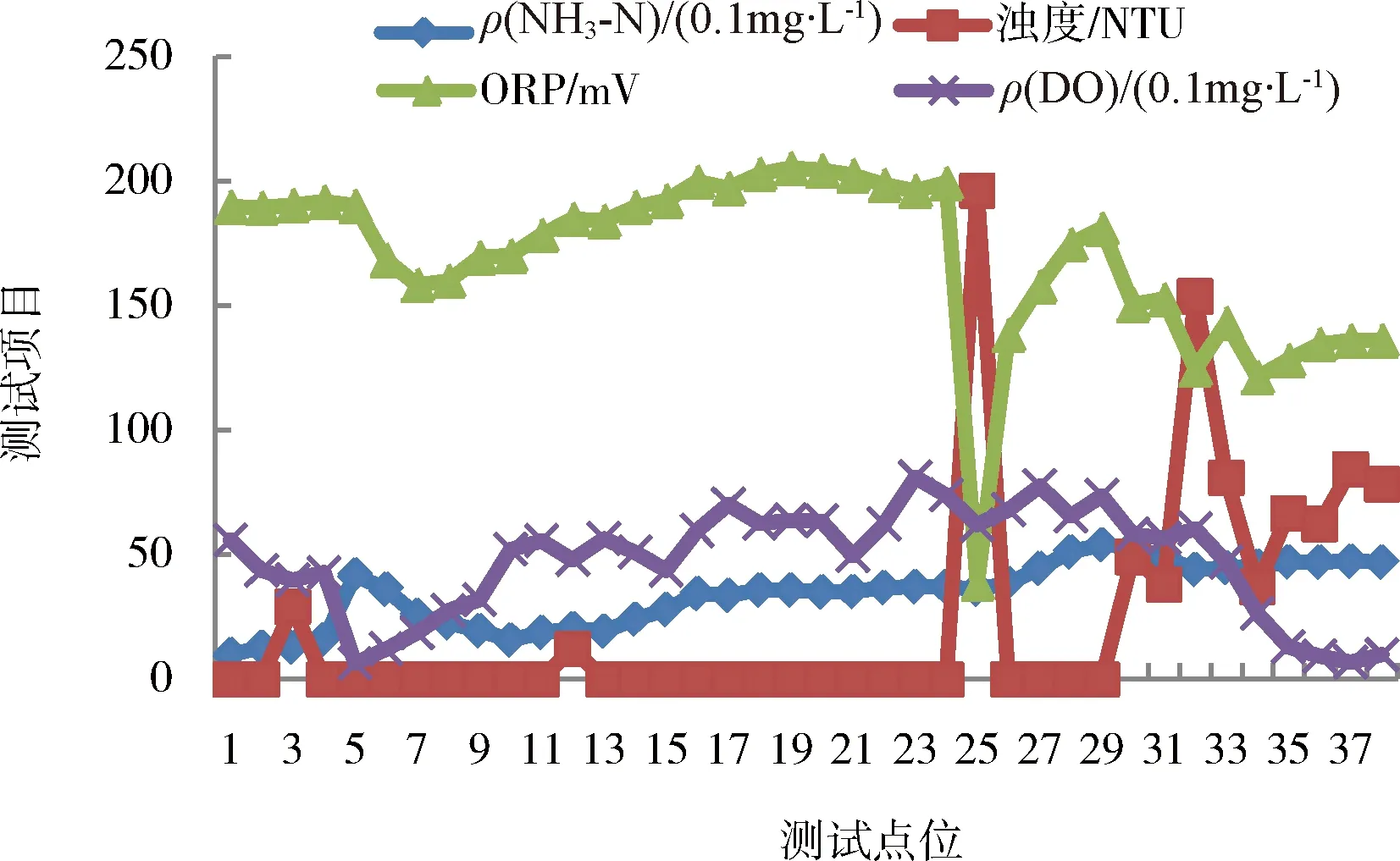
图3 古运河无人船监测数据

表4 古运河实际水样比对结果①
①实际水样总体比对合格率≥85%为合格。
由图3和表4可见,无人船搭载在线监测仪器航行时所测量的项目中,DO项目的质控比对结果一致性较好,ORP和NH3-N项目次之,浊度项目最差。分析原因主要与各项目的测量原理以及实际水样中含有大量杂质干扰有关。
(1)DO测量时需保持一定的流速,防止水样与膜电极接触瞬间该部位样品中DO耗尽而出现虚假读数,无人船的航行测量很好地满足了这个条件;
(2)ORP测量时铂片电极响应速度快,但是须保持电极表面清洁光亮,而实际水样中含较多杂质,对ORP电极会产生一定的干扰;
(3)浊度测量是利用红外光穿过样品池来测定水样中悬浮物颗粒散射的光量,转化为浊度值。该方法需保证样品池保持稳定,无人船航行时无法保证很好的稳定性,导致浊度测量时多为无效值,不建议无人船搭载浊度电极进行水体浊度监测;
(4)采用离子选择电极法测量地表水体中NH3-N时,水中的金属离子和高浓度溶解离子会产生严重干扰,且在进行低浓度测量时仪器响应速度较慢,数据线性关系不佳。因此在测量目标ρ(NH3-N)<0.5 mg/L时,不建议无人船搭载离子选择电极测量水中的NH3-N。
(5)图3中25号点位的浊度和ORP的测量值出现了极值,是因为无人船行驶至该区域时,被河道中布置的渔网缠绕住,无人船因为需按照既定GPS轨线行驶而不断挣扎,船体发生了严重晃动,干扰了浊度和ORP项目的原位测量结果,从另一方面也说明了无人船航行时船体的稳定性对于测量结果的重要性。
3 结语
在镇江市建成区内河流的水质状况普查工作中,无人船进行了超过120 h的航行试验,总航行里程约为90 km,验证了无人船在城市内河自动航行监测的可靠性和可行性。无人船选择搭载用于原位监测的传感器时应充分考虑其测量原理的适合性,类似于浊度传感器等不适于在航行时测量的传感器不能应用于无人船监测平台上。通过合理搭载相应的传感器原位监测地表水的水质状况,无人监测船能够满足地表水测量数据准确度的要求,同时可实现研究区域的监测全覆盖,提升了地表水环境监测的工作效率。
[1] 中华人名共和国中央人民政府.国务院关于印发水污染防治行动计划的通知(国发[2015]17号)[EB/OL].(2015-04-02)[2016-09-14].http://www.gov.cn/zhengce/content/2015-04/16/content_9613.htm.
[2] 江苏省人民政府. 省政府关于印发江苏省水污染防治工作方案的通知(苏政发[2015]175号)[EB/OL].(2015-12-28)[2016-09-14]. http://www.jiangsu.gov.cn/jsgov/tj/bgt/201601/t20160111490432.html.
[3] 王卫星,高奕龙,陈彬彬,等.无人驾驶自动导航水质监测船[J].信息技术与信息化,2015(5):36-38.
[4] 戴玄吏,汤佳峰,章霖之. “湖泛”恶臭物质分析及来源浅析[J].环境监控与预警,2010,2(3):39-41.
[5] 黄国良,徐恒,熊波,等.内河无人航道测量船系统设计[J].水运工程,2016,41(1):162-168.
[6] MANLEY J E.Unmanned surface vehicles,15 years of delvlopment[C]//Proceedings of MTS/IEEE Quebec Conference and Exhibition,2008:1-4.
[7] 金久才,张杰,邵峰,等.一种海洋环境监测无人船系统及其海洋应用[J].海岸工程,2015,34(3):87-92.
[8] 张万松,缪旭波,朱风松,等. 水污染源在线监测系统常见问题及核查方法研究[J].环境监控与预警,2012,4(2):22-26.
栏目编辑 周立平
Application of Unmanned Surveillance Ship in Inland River Water Quality Monitoring
LUO Gang1,ZHANG Ran2
(1.ZhenjiangEnvironmentalMonitoringCentralStation,Zhenjiang,Jiangsu212000,China; 2.ZhuhaiYunzhouIntelligenceTechnologyCo.Ltd,Zhuhai,Guangdong519000,China)
Unmanned ship is a new type of unmanned automatic monitoring platform, which can be equipped with the corresponding measurement electrode to automatically monitor the status of water quality. This paper used unmanned ship to carry out in situ monitoring of ammonia nitrogen, dissolved oxygen, oxidation reduction potential and turbidity in the waters of built-up area of Zhenjiang city. The results showed that the unmanned ship meets the need of surface water monitoring if it be equipped with the corresponding measuring electrode. The unmanned monitoring vessels can be applied to water environmental monitoring work in the inland city.
Unmanned vessel; Water environment; In situ monitoring; Ammonia nitrogen; Dissolved oxygen; Oxidation reduction potential; Turbidity
2016-09-14;
2016-10-21
罗刚(1981—),男,高级工程师,硕士,从事环境监测工作。
X832
B
1674-6732(2017)01-0018-03
猜你喜欢
实用手外科杂志(2022年2期)2022-08-31
供水技术(2022年1期)2022-04-19
陶瓷学报(2021年5期)2021-11-22
药学与临床研究(2021年3期)2021-07-13
水上消防(2019年3期)2019-08-20
传感器世界(2019年3期)2019-02-17
天然产物研究与开发(2018年5期)2018-06-13
酒·饮料技术装备(2018年1期)2018-04-28
船海工程(2015年4期)2016-01-05
中国航海(2014年1期)2014-05-09