
SPMSM弱磁算法自适应调速仿真
2017-04-14 12:41苏伟杰蔡权林黄佳怡
空间控制技术与应用 2017年1期
苏伟杰,张 军,蔡权林,张 波,黄佳怡
(上海航天控制技术研究所,上海201109)
SPMSM弱磁算法自适应调速仿真
苏伟杰,张 军,蔡权林,张 波,黄佳怡
(上海航天控制技术研究所,上海201109)
为提高弹用电动舵系统轻负载情况下的最大舵偏角速度,并抑制负载扰动,在表贴式永磁同步电机空间矢量控制算法的基础上提出弱磁自适应控制策略.采用基于电机物理功率限制的弱磁控制算法,实现调速系统在轻负载功率富余时的弱磁升速.设计基于Lyapunov稳定性的速度自适应控制器,克服速度环采用传统PI调节算法时随着负载变化时动态性能弱的缺点.通过Simulink仿真证明该算法能够在实现弱磁升速的同时,具备良好的负载扰动抑制性能.
功率富余;弱磁控制;负载变化;自适应控制
0 引言
永磁同步电机结构简单、体积小、质量轻、效率高等特点,使其被广泛应用于高精度伺服控制系统中.随着现代工业发展对PMSM控制系统的要求越来越高,额定工况的应用已经无法满足实际需求,基速以上的恒功率运行区域逐渐成为挖掘电机潜能的研究热点[1-3].近年来,针对弱磁控制策略的研究取得了不小进展.文献[4-5]采用基于查表法的弱磁控制策略,这种策略控制精度高,但数据量大不易于工程移植与实现.文献[6-7]采用基于梯度下降法的弱磁控制策略,这种策略鲁棒性好,响应速度快,但算法实现比较复杂.文献[8]改进传统基于电压闭环的弱磁控制策略,提出利用过调制模块的输入与输出之间的电压差来调节弱磁电流,这种方法控制简单,但精度不高.文献[9]用LPF代替PI控制器,LPF环节的作用是能够抑制电流调节器的饱和,从而增大电流调节器的输出电压范围.文献[10]在文献[8]的基础上,取得不错的弱磁效果,控制精度有所提高.文献[11-12]改进弱磁方法,通过弱磁方法中加入电压闭环和低通滤波器减小转矩脉动和电流谐波.文献[13]加入谐振控制器,抑制电流谐波,改善弱磁性能.
本文采用基于电压反馈的弱磁控制策略,设计了新的定子电流注入策略.同时,针对系统负载变化对系统速度跟踪性能造成的影响,设计了自适应弱磁控制器.通过与传统的id=0控制方法进行比较,证明了该控制器可以在实现弱磁升速的同时减小负载扰动产生的转速波动.
1 永磁同步电机数学模型
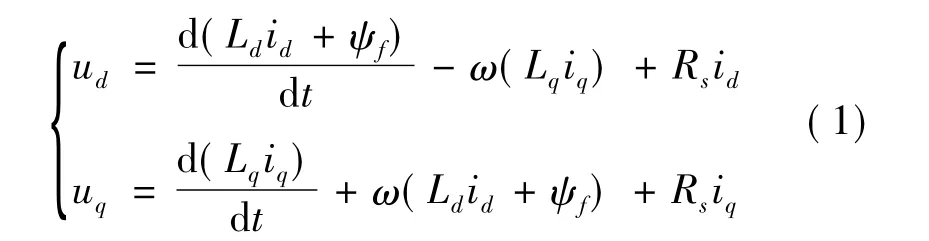
在永磁同步电机矢量控制系统建模分析中以d、q同步旋转坐标系数学模型最为常见,通常将d轴定义在转子的N极上.由此,在d、q同步旋转坐标系下,经典的永磁同步电机电压方程[14]可表示为
同时,结合电机动力学方程[14]可得永磁同步电机矢量控制模型如下:
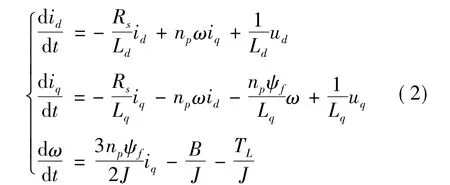
式中:ud、uq为定子d、q轴电压分量;id、iq为定子d、q轴电流分量;ω为转子机械角速度;Rs为定子绕组电阻;Ld、Lq为定子绕组d、q轴电感分量;ψf为转子永磁体磁链;np为极对数;B为电机摩擦系数;J为电机转动惯量;TL为负载力矩.
2 弱磁控制方案设计
2.1 弱磁控制原理
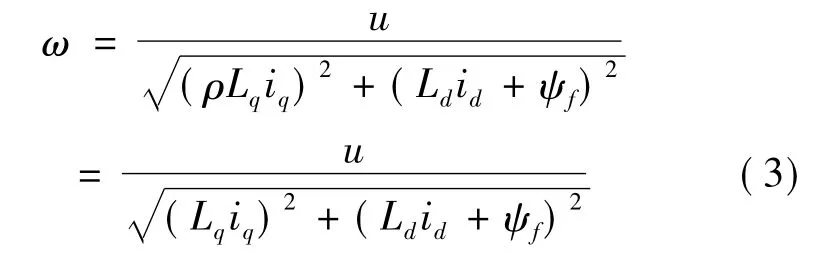
为提高系统效率,挖掘电机潜能,需要电机在额定转速上运行,此时可用弱磁升速的方法实现.由于表贴式永磁同步电机凸极率接近1(ρ=Ld/Lq≈1),故可认为Lq=Ld.当电机稳态工作时,忽略电压方程式(1)中的动态项和定子电阻,可得到电机转速与电压的关系如式(3)所示,从中可以进一步理解永磁同步电机弱磁升速的本质,当电动机端电压达到逆变器输出电压的极限值时,即u=umax,要想继续提高电机转速只能通过调节电机定子电流的交、直流分量来实现.
由式(3)可知,当u=umax且电感与磁链基本保持不变,要想继续提高转速,可以采取以下两种方式:
1)增加电机的直轴电流id,使直轴产生去磁分量,且满足Ldid+ψf≥0(id<0);
2)减少电机的交轴电流iq.
由于电机电流极限圆的存在,这两种方法无法独立使用,即在增加直轴去磁分量电流的同时,需相应减小交轴电流分量,以确保电机电流矢量运行在电流极限圆内,从而获得弱磁升速效果.
弱磁升速原理如图1所示.图中A点对应的定子电压和电流都已达到了极限值.由此可得对应的恒转矩区域控制参数与转折速度为
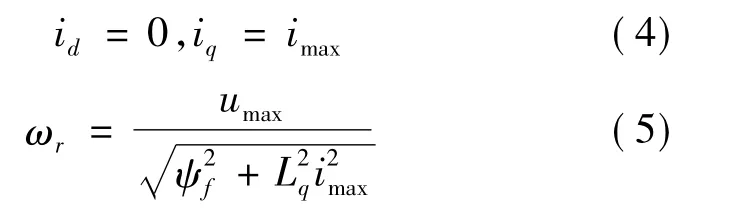
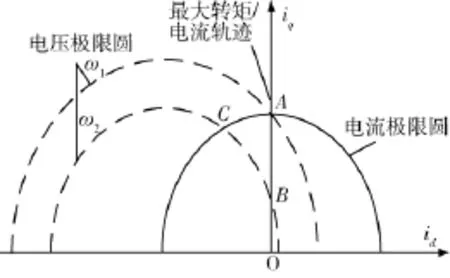
图1 表贴式永磁同步电机定子电流矢量轨迹Fig.1 Current vector track of surface permanent magnet synchronous motor
当电机转速指令由ω1升高至ω2(额定转速以上)时,最大转矩/电流比轨迹在B点与电压极限圆相交,由于电机能力限制,无法实现输出力矩与转速的同时跟踪.为了在保证速度的情况下输出较高的力矩,id=0控制无法满足要求,因此将B点移到C点处,从而进入弱磁控制区域,实现弱磁升速.
2.2 基于定子电流注入的电压反馈弱磁控制方案
在永磁同步电机控制中,电流环调节器一般使用PI控制器.随着转速的提高,电机反电势逐渐增加,当反电势超过逆变器极限电压时,逆变器提供的电流无法输入到定子,PI电流调节器达到饱和,影响控制效率.因此,为了解决这一问题,可以考虑将直轴去磁电流id与电机直流母线电压构建联系,将电压输出差值作为电流反馈注入到电流环中进行弱磁控制,从而避免出现电流调节器饱和的情况.目前针对电压反馈的算法很多,取得的控制效果也各有千秋,本文在此基础上调整了电压获取方式及电流补偿方案,设计一种基于定子电流注入的电流分配方案,使得系统可以在功率限制下进行两种工况的切换.
如图2所示,将逆变器直流侧电压UDC的极限值与电流调节器的输出电压做比较.额定转速以下运行时,电机端电压未达到逆变器所提供的极限电压,采用id=0控制可以获得最大电磁转矩;随着转速继续上升,电流调节器的输出的参考电压Ud、Uq逐渐积累增加,超出逆变器极限电压,此时对电压反馈进行函数处理,产生负向电流注入d轴进行补偿,从而进入弱磁运行区,如式(6)~(7)所示.
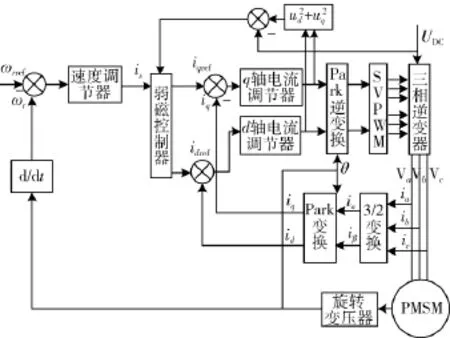
图2 电压反馈弱磁控制框图Fig.2 Block diagram of flux-weakening control based on voltage feedback
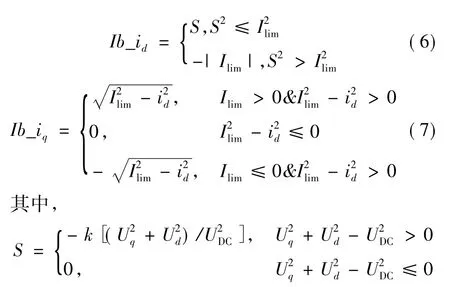
式中,Ib_id、Ib_iq为d、q轴电流补偿量;Ilim为电流极限值;Ud、Uq为电流调节器输出的d、q轴电压分量; UDC为逆变器直流侧极限电压;参数k为可调变量,应根据对象实际情况进行选取.原则上k值选取越大弱磁控制效果越好,但由于电流极限圆的存在,k值取值过大将会使系统不稳定,k值取值过小弱磁效果不明显,本文取k=12.
电流环调节器采用PI调节器,为了便于设计d、q轴控制参数为均选为Kp=73、KI=10.
3 基于功率限制的速度自适应控制
3.1 自适应控制器设计方案
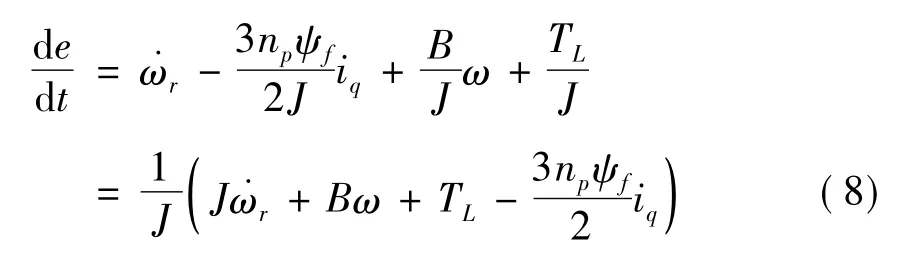
由于系统的控制目标为速度跟踪,则跟踪误差为:e=ωr-ω.假设速度二次可微,选取e作为虚拟状态变量,对e求导并将式(2)中的动力学方程代入,可得子系统方程为:
将iq作为虚拟控制函数,并令Lyapunov函数V=1/2e2(V≥0).对V求导可得:


其中m>0为可调参数.
3.2 弱磁自适应控制方案
由于永磁同步电机的输出功率与转速和输出力矩的乘积成正比,即Teω∝P输出≤P额=P,在系统稳态运行时应满足Te≈TL,式(10)可转化为:

弱磁自适应控制流程如图3所示:
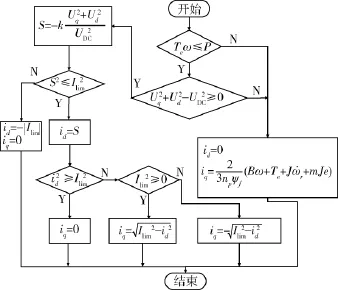
图3 弱磁自适应控制流程图Fig.3 Flow chart of flux-weakening adaptive control
4 仿真结果分析
利用MATLAB/Simulink工具箱搭建弱磁调速模型,电机部分参数如表1所示.
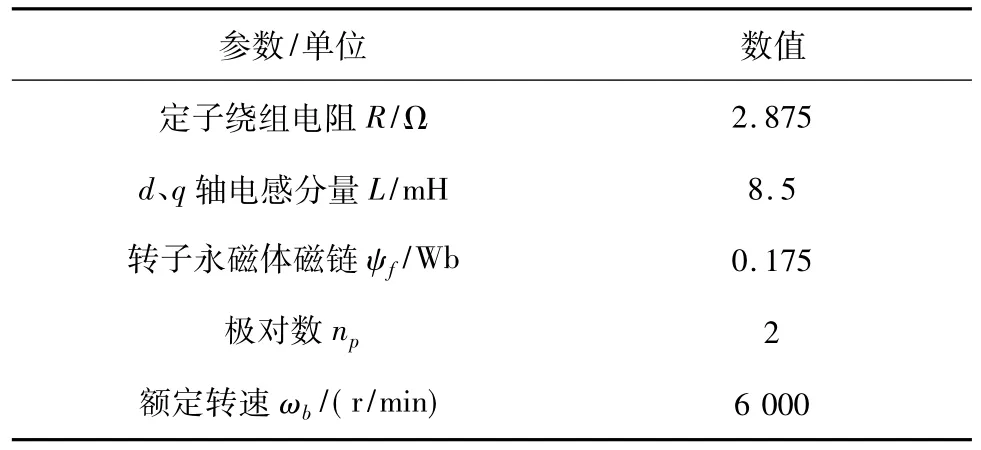
表1 电机部分参数Tab.1 Parameters of the motor
为了对比本文所提出的方法与典型的转速环采用PI调节器的方法,仿真结果如图4所示.由仿真曲线可以发现,在不同输入指令情况下(额定转速以下阶跃、额定转速以上阶跃、正弦指令),由于负载的变化,传统的速度PI控制器存在着明显的缺陷.如图4(a)所示,当电机运行在额定转速时,传统PI控制器尽管也可以基本跟踪上速度指令,但在负载力矩变化较大时存在着明显的转速波动,而相应的自适应弱磁控制器,转速波动基本可以忽略;当速度指令超过额定转速时,如图4(b)所示,传统的速度PI控制器,已经无法实现有效的速度跟踪,并随着负载的变化出现了大范围周期性波动.而相应的自适应弱磁控制器产生的控制曲线仍能很好的进行跟踪,仅在负载力矩较大时出现了一定的转速下降,这是由于大负载时的富余功率不足以实现该转速的跟踪;由图4(c)可以发现,当速度指令为正弦指令时,与传统的速度PI控制器相比,自适应弱磁控制器的跟踪性能要好的多,即使在额定转速以上部分,转速的波动也基本可以忽略不计,很好的抑制了由于负载力矩变化而产生的扰动.但同时也可以发现,当负载较大时,功率使用接近上限,PI控制与弱磁控制容易出现动态来回切换,从而带来电流毛刺现象,这一点需要在后续工作中加以抑制.
从上述对比分析可知,由于弱磁算法的引入,使得负载变化对调速系统的影响更加明显,同时传统的PI控制算法又使得调速系统存在着明显的转速波动,甚至使系统出现失速.本文所设计的自适应弱磁控制器能够明显减少负载扰动对控制性能的影响,同时有效的利用富余功率,进行弱磁升速,较好地实现了转速与输出力矩的平衡.
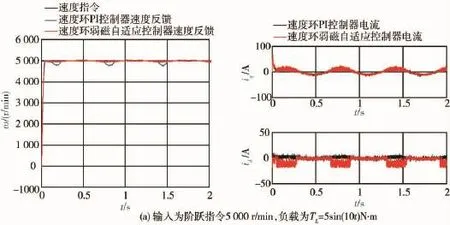

图4 速度环经典PI控制与弱磁自适应控制转速、电流对比Fig.4 Speed and current contrast between classic PI control and flux-weakening adaptive control for speed loop
5 结论
在功率受限的情况下,由于负载的变化,典型的速度环PI控制器,无法实现额定转速以上的稳定运行,而弱磁算法引入会加剧负载变化对控制性能的影响.本文引入基于定子电流注入的电压反馈的弱磁算法,并通过设计速度自适应控制器,实现了基速以上的转速稳定控制,抑制了负载变化的扰动,提高了电机电流矢量的利用效率.这种控制方式简单易行,具有一定的工程应用价值.
[1]康劲松,崔宇航,王硕.基于电流快速响应的永磁同步电机六拍运行控制策略[J].电工技术学报,2016: 165-174.KANG J S,CUI Y H,WANG S.The current rapid response control strategy for the six-step operation of permanent magnet synchronous motors[J].Transactions of China Electrotechnical Society,2016:165-174.
[2]汪兆栋,游林儒,曾文涛.电动汽车宽速域优化算法及弱磁控制策略研究[J].微电机,2015,48(7):73- 78.WANG Z D,YOU L R,ZENG W T.Research on wide speed range optimization algorithm and flux-weakening control strategy for electric vehicle[J].Micromotor,2015,48(7):73-78.
[3]苏变玲,辛云宏,苏涛.基于混合弱磁的高速PMSM抗饱和调节方法[J].电力电子技术,2015,49(9): 65-68.SU B L,XIN Y H,SU T.High-speed PMSM based on hybrid flux weakening saturation adjustment method[J].Power Electronics,2015,49(9):65-68.
[4]LENKE R U,DONCKER R W De,MU-SHIN K,et al.Field weakening control of interior permanent magnet machine using improved current interpolation technique[C]//The 37thPower Electronics Specialists Conference.New York:IEEE,2006.
[5]OTTOSSON J,ALAKULA M.A compact field weakening controller implementation[C]//International Symposium on Power Electronics,Electrical Drives,Automation and Motion.New York:IEEE,2006.
[6]唐朝晖,丁强,喻寿益,等.内埋式永磁同步电机的弱磁控制策略[J].电机与控制学报,2010,14(5):68-72.TANG C H,DING Q,YU S Y,et al.Research of fluxweakening strategy of interior permanent magnet synchronous motor[J].Electric Machines and Control,2010,14(5):68-72.
[7]盛义发,喻寿益,桂卫华,等.轨道车辆用永磁同步电机系统弱磁控制策略[J].中国电机工程学报,2010,30(9):74-79.SHENG Y F,YU S Y,GUI W H,et al.Field weakening operation control strategies of permanent magnet synchronous motor for railway vehicles[J].Proceedings of the CSEE,2010,30(9):74-79.
[8]DING K,CHENG K W E,XU X D e,et al.A novel detection method for voltage sags[C]//The 2ndInternational Conference on Power Electronics Systems and Applications.PSRC,2006.
[9]HOLTZ J,LOTZKAT W,KHAMBADKONE A M.On continuous control of PWM inverters in the overmodulation range including the six-step mode[J].IEEE Transactions on Power Electronics,1993,8(4):546-553.
[10]HESONG L,ZHU Z Q,MOHAMED E,et al.Fluxweakening control of nonsalient pole PMSM having large winding inductance,accounting for resistive voltage drop and inverter nonlinearities[J].IEEE Transactions on Power Electronics,2012,27(2):942-952.
[11]吴芳,万山明,黄声华.一种过调制算法及其在永磁同步电动机弱磁控制中的应用[J].电工技术学报,2010,25(1):58-63.WU F,WAN S M,HUANG S H.An overmodulation algorithm and its application in PMSM drive with fluxweakening control[J].Transactions of China Electrotechnical Society,2010,25(1):58-63.
[12]张兴春,张幽彤,黄文卿.车用内置式永磁同步电机过调制弱磁算法[J].北京理工大学学报,2013,33 (9):925-928,933.ZHANG X C,ZHANG Y T,HUANG W Q.Research on over-modulation flux-weakening strategy of IPMSM in HEV application[J].Transactions of Beijing Institute of Technology,2013,33(9):925-928,933.
[13]王贺超,夏长亮,阎彦,等.基于谐振控制的表贴式永磁同步电机弱磁区电流谐波抑制[J].电工技术学报,2014,29(9):83-91.WANG H C,XIA C L,YAN Y,et al.Current harmonic suppression in the flux-weakening control of surface permanent magnet synchronous motors using resonant controllers[J].Transactions of China Electrotechnical Society,2014,29(9):83-91.
[14]杨国良,李建雄.永磁同步电机控制技术[M].北京:知识产权出版社,2015.YANG G L,LI J X.Permanent magnet synchronous motor control technology[M].Intellectual Property Publishing House,2015.
Simulation of Flux-Weakening Algorithm for SPMSM Adaptive Speed Adjustment
SU Weijie,ZHANG Jun,CAI Quanlin,ZHANG Bo,HUANG Jiayi
(Shanghai Aerospace Control Technology Institute,Shanghai 201109,China)
In order to improve the maximum rotation angular velocity of electromechanical actuator (EMA)under the light load condition and inhibit the load disturbance,the flux-weakening algorithm for SPMSM adaptive speed adjustment is proposed on the basis of space vector pulse width modulation(SVPWM).Firstly,the speed is improved by the flux-weakening algorithm based on physical power limit,when the power of the system is surplus.Then,for the traditional PI algorithm has the disadvantage of weak dynamic performance when load is changeable,a speed adaptive controller based on Lyapunov stability is presented.Finally,it is proved that the algorithm can realize flux-weakening speed growth,and a good performance of load disturbance inhibition by Simulink simulation.
power surplus;flux-weakening control;load change;adaptive control
TM351;TM341;TP273
1674-1579(2017)01-0067-06
10.3969/j.issn.1674-1579.2017.01.011
苏伟杰(1991—),男,硕士研究生,研究方向为航天器伺服控制技术;张 军(1969—),男,研究员,硕士生导师,研究方向为战术武器电动舵系统伺服控制技术;蔡权林(1981—),男,高级工程师,研究方向为战术武器电动舵系统伺服控制技术;张 波(1987—),男,助理工程师,研究方向为永磁同步电机的现代控制技术;黄佳怡(1985—),女,工程师,研究方向为战术武器电动舵系统伺服控制技术.
2016-07-26
猜你喜欢
防爆电机(2022年4期)2022-08-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2021年5期)2021-11-04
防爆电机(2021年3期)2021-07-21
防爆电机(2021年2期)2021-06-09
宇航计测技术(2018年3期)2018-09-08
汽车与新动力(2015年1期)2015-02-27
汽车电器(2014年8期)2014-02-28
