
办公楼变风量新风控制系统设计
2017-04-13 08:41高俊钗杨云龙
电子产品世界 2017年3期
高俊钗 杨云龙


摘要:本文采用SIMATIC S7-200 PLC、WINCC 6.0和PC Access等产品设计了变风量办公楼新风控制系统,并建立了其主从网络控制结构。采用总风量控制方法,基于限幅P1D控制算法对风机转速进行快速调节,得到了系统送风量的最优控制策略。通过Simulink进行了仿真,仿真实验表明,该控制方法简单、易行,可以快速稳定地实现新风控制。
关键词:变风量控制系统;限幅P1D控制;主从控制
DOI:10.3969/j.issn.1005-5517.2017.2.017
引言
变风量空调系统(VAV)是通过改变送入房间的风量来满足室内变化的需求。变风量空调系统有节能、系统可控性好、能实现分区控制等优点。随着我国各类商业办公建筑的大批建设,VAV空调系统逐渐得到了更多的应用。
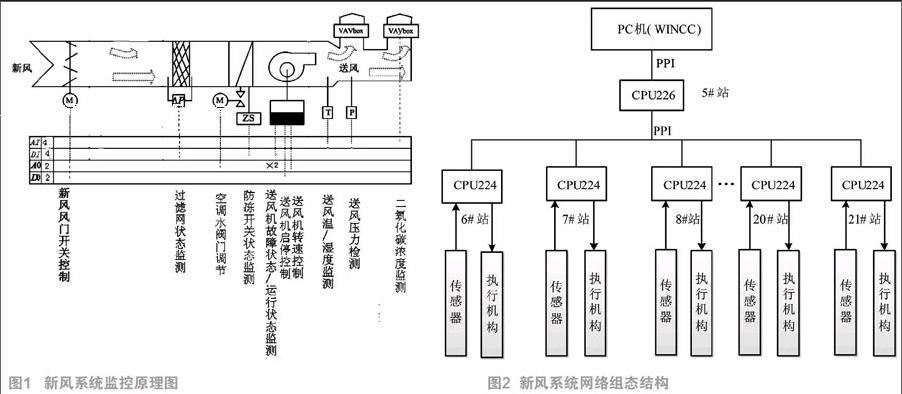
对新风系统的各点位进行监控,可以有效地节约能源。根据末端新风量的需求,合理地设计所需新风量。图1是新风系统监控原理图。
1 控制系统构成
1.1 网络结构
考虑系统可靠性要求及规模大小,此办公楼新风系统的控制网络采用PPI通信。PPI通信协议中S7-200 CPU 226和S7-200 CPU 224采用主从方式进行通信,主设备是S7-200 CPU226,它有26路数字量输入、1 6路数字量输出端口,可以满足本项目的需求,从站设备是S7-200 CPU 224,它有1 4路数字量输入,10路数字量输出端口。其通信过程是按照PPI主从通信格式,用一定格式的数据向PLC发送通信命令。S7-200CPU 226用顺控的方式读取16个从站的数据和向16个从站写数据以及对数据进行处理。如命令数据格式无误,则从站PLC向主站发出表示命令正确的初步应答信号,主站在收到初步应答信号后,再向从站PLC发送确认命令。从站收到确认命令后,执行命令响应。网络组态结构原理图如图2所示。
S7-200PLC控制器是整个控制系统的核心,它通过模拟量输入通道(A1)和数字量输入通道(D1)采集实时数据,然后按照一定的控制规律进行运算,最后发出控制信号,并通过模拟量输出通道(AO)和数字量输出通道(DO)直接控制设备的运行。
PC Access可以用于连接西门子或者第三方支持OPC技术的上位软件。WINCC是视窗控制中心,它是一个过程监视系统,通过组态画面读取各层新风系统的相关参数及运行状态。由主界面可进入工作日历,根据工作日历提前设置每天风机的工作状态(工作或者休息),操作者可根据需要对风机进行自由设置。
1.2 基于限幅PID的总风量控制方法
总风量控制方法是基于VAV末端风量求和的一种控制方法,变风量空调机组控制器读取本系统所有末端的需求风量,得出总需求风量。风机风量与转速是一个近似的正比关系,可在初调时通过实测得到。
中央空调末端控制面板上对应着低、中、高三个档位,每个档位对应着不同送风量需求。假定低、中、高档分别对应的风量需求为∑1、∑2和∑3。其中∑1对应的送风量为30%,∑2对应的送风量为60%,∑3对应的送风量为90%。本文的最終目的就是要保证各个房间所需的送风量都可以达到,并考虑留有15%的余量,当房间所需风量发生变化时,总送风量也会随之发生变化。假定有n个末端,其中有n1个房间开启低档,有n2个房间开启中档,有n3个房间开启高档,考虑到给定风量要满足所有末端的风量需求,不至于波动太大,要留有一定余量Qy=1S%Q,Q为总送风量。则存在以下关系式:
n1+n2+n3=n (1)
n1∑1+n2∑2+n3∑3+Qy=Q (2)
通过检测末端各房间开启空调的模式,再由上式确定总送风量,平稳的调节风机的转速,这样既节约的能源,又降低的风机的损耗。
我们还可以对总送风量进行优化调节,从而满足各末端的变化。优化调节有两种方式:1)当送风量的变化AQ>20%时,控制中心会对总送风量的设定值进行重新设定;2)每10分钟就对总送风量的给定值进行调节。这两种调节方式的并行运用,能更好的满足末端风量需求的变化,从而达到最优的状态。
通过对压力无关型变风量末端的分析得出了设定风量作为控制变量,进而提出了变风量系统总风量控制方法。系统总送风量控制通过调节风机转速来维持风机保持在较小的耗能范围。风量控制方式主要有两种策略:静压控制方式和总风量控制方式。但由于受到系统设计、施工及风机选型等因素的影响,管道中静压设定点的静压检测值会产生较大的波动,会对压力测量产生影响,故本文采用总送风量控制方法。
风机总风量控制方法是基于压力无关型的VAV末端研究出的一种新的简单易行的空调系统的控制方法。风机控制环节的控制线路如图3所示。通过此控制环路的分析,发现了设定总风量是一个很有价值的量,根据各末端所需风量,并对各末端风量求和得出总送风量,达到系统希望达到的风量状态。
随着各房间所需风量的变化,其变化波动较大,但是在实际中为了达到给定风量需要不停的调节风机,这样会使风机的损耗过大,这时就需要我们对给定风量进行一些优化控制,使系统处于相对平稳的状态。
常用的线性PID控制策略必须使控制器工作在线性区。为保证控制器的输出不超出限幅,可以选用限幅足够大的控制器,而限幅大的控制器价格也较昂贵;也可以通过调整PID参数,使控制器的输出始终小于限幅。本文将控制器的限幅考虑在内,即在PID控制器与被控对象间插入一个饱和环节,如图4所示。使用位置式数字PID控制算法,设采样周期为T,控制器的限幅为um,其控制规律为:
2 仿真及结果分析
根据ziegler-Nichols整定公式,对文中被控对象进行simulink仿真。经测量取Ka=78.75,T=63。采样周期Tc=0.1s,控制器的限幅Um=10,系统指标取绝对误差积分指标JITAE。在没有人为经验的情况下,用穷举法搜索PID参数。为保证搜索的广度和精度,搜索分为两步进行:第一步,在[0,50]的范围内以1为步长搜索PID参数;第二步,在第一步得到的最优点附近以0.1为步长进行搜索。搜索耗时20分15秒。线性区最优PID参数为:Kp=1.28、Ki=0.0、Kd=0.68;全局最优PID参数为:Kp=14.1、Ki=0.1、Kd=15.8。系统单位阶跃响应如图5所示。
从图5中可以看出,全局最优PID参数对应的限幅PID控制策略,在初始时段控制器以最大量输出,使得系统的响应速度更快,调节时间更短,使超调量不至于过大,并且具有相对较高的稳定性。
3 结论
本文提出的基于限幅的PID控制策略很好的利用了控制器的输出限幅,既发挥了传统PID控制器的能力,又体现了PID控制器良好的鲁棒性。在参数整定时,使用高效的搜索算法可以快速地搜索到最佳的PID参数,使得项目能够快速顺利的进行。在项目实际调试过程中,西门子PLC产品的灵活性、开放性,尤其是WINCC强大的脚本功能使现场调试时间得到了有利保证。
