
导弹制导控制半实物仿真实验系统设计
2017-04-12 09:21于秀萍吴新锋张浩昱
实验室研究与探索 2017年2期
于秀萍, 刘 涛, 吴新锋, 张浩昱
(哈尔滨工程大学 自动化学院, 哈尔滨 150001)
导弹制导控制半实物仿真实验系统设计
于秀萍, 刘 涛, 吴新锋, 张浩昱
(哈尔滨工程大学 自动化学院, 哈尔滨 150001)

针对探测制导与控制技术专业本科生的学习与实验教学的需要,基于实验室已有的二轴转台光电跟踪系统设计了导弹制导与控制半实物仿真教学实验平台。该平台以二轴转台作为物理实物部分,以PC机和运动控制器为控制平台和控制核心,通过转台的运动控制卡库函数实现转台偏航轴和俯仰轴的位置和速度控制。运用Simulink可视化的系统建模界面建立某导弹的运动学和动力学模型,组成导弹的内环姿态控制回路和外环制导回路,用RTW技术将模型转化为代码,加入I/O接口后,将转台放入回路中进行半实物仿真。经测试验证,该系统在学生实验中起到了良好的教学效果。
导弹制导控制; 半实物仿真; Simulink; 运动控制; 教学实验平台
0 引 言
目前,探测制导与控制技术专业实验室以二轴转台为硬件平台,PC机为软件平台,可以实现图像识别、运动控制及靶标跟踪等实验,涉及到数字图像处理、电机控制等知识。为了加深学生对飞行器制导控制概念的理解,激发学生的学习兴趣,开发了导弹制导控制半实物仿真实验平台,该平台以导弹的姿态控制和制导控制为主要教学内容,可以实现模拟导弹姿态运动的实时观察和导弹弹道的显示,实现制导与控制规律的验证,深化学生对专业知识的理解,激发学生对飞行器制导控制的兴趣及好奇心[1-3]。
1 制导控制半实物仿真系统设计
1.1 实验设备组成
制导控制半实物仿真实验系统实物图如图1所示,主要由以下几部分组成:
(1) 二轴飞行转台。转台为模拟导弹或雷达跟踪系统运动模块的类工业旋转运动系统。它包含电控箱、转台本体两大部分。转台本体包括:机械构件、伺服电机(2套)、限位开关。电控箱里面安装有伺服运动控制器、I/O接口板、电源开关等。
(2) 图像采集设备。图像采集设备由工业摄像头、镜头、1394接口卡(含数据线)三部分组成。
(3) 仿真与控制计算机。计算机安装系统为Windows XP、PCI插槽安装ADT-8960运动控制卡。
(4) 靶标。目标模拟器采用静止靶标。
(5) 弹体模型。此模型采用3D打印技术制造,安装于转台上,便于观察导弹姿态变化。
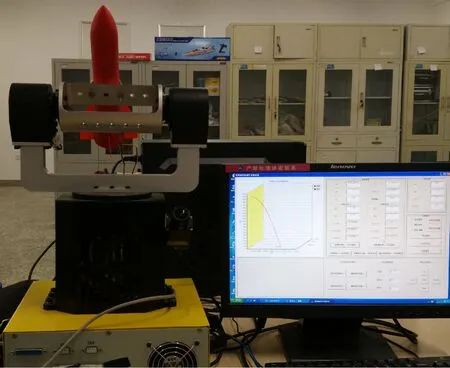
图1 实验系统实物图
1.2 制导控制半实物仿真实验教学知识点及系统设计
结合半实物平台的教学用途,学生通过该仿真实验可以巩固、掌握的知识点有:① 直流电动机的位置、速度控制方法及控制器的设计;② 导弹动力学模型、运动学模型、弹目相对运动模型的建立;③ 自动驾驶仪的设计方法;④ 比例导引规律的设计方法及导引系数与脱靶量之间的联系;⑤ 半实物仿真的具体实现方法;⑥ MFC界面编程的思想及具体实现[4-6]。设计制导控制半实物仿真实验平台结构如图2所示。
图2中右边红色虚线框中为在Simulink中建立的导弹制导控制仿真模型,可以封装为EXE可执行文件作为仿真内核,通过PC机的VC++环境输入导弹的初始运动参数(坐标、速度初始姿态角、初始弹道角)及控制参数、导引参数和目标的初始参数(坐标、速度等),使仿真内核开始运行,将导弹的姿态角(对于二轴飞行转台,只有俯仰角、偏航角)或对应的角速度输入到飞行转台,控制其转动相应的角度,并通过运动控制卡ADT-8960控制光电编码器采集相应的姿态角和角速度再传递给内核,摄像头充当导引头采集靶标的运动参数也传递给仿真内核,如此循环构成制导控制回路,当导弹距离目标最近时仿真结束。根据半实物仿真系统预期要求,设计的系统软件需具备如图3所示的功能。
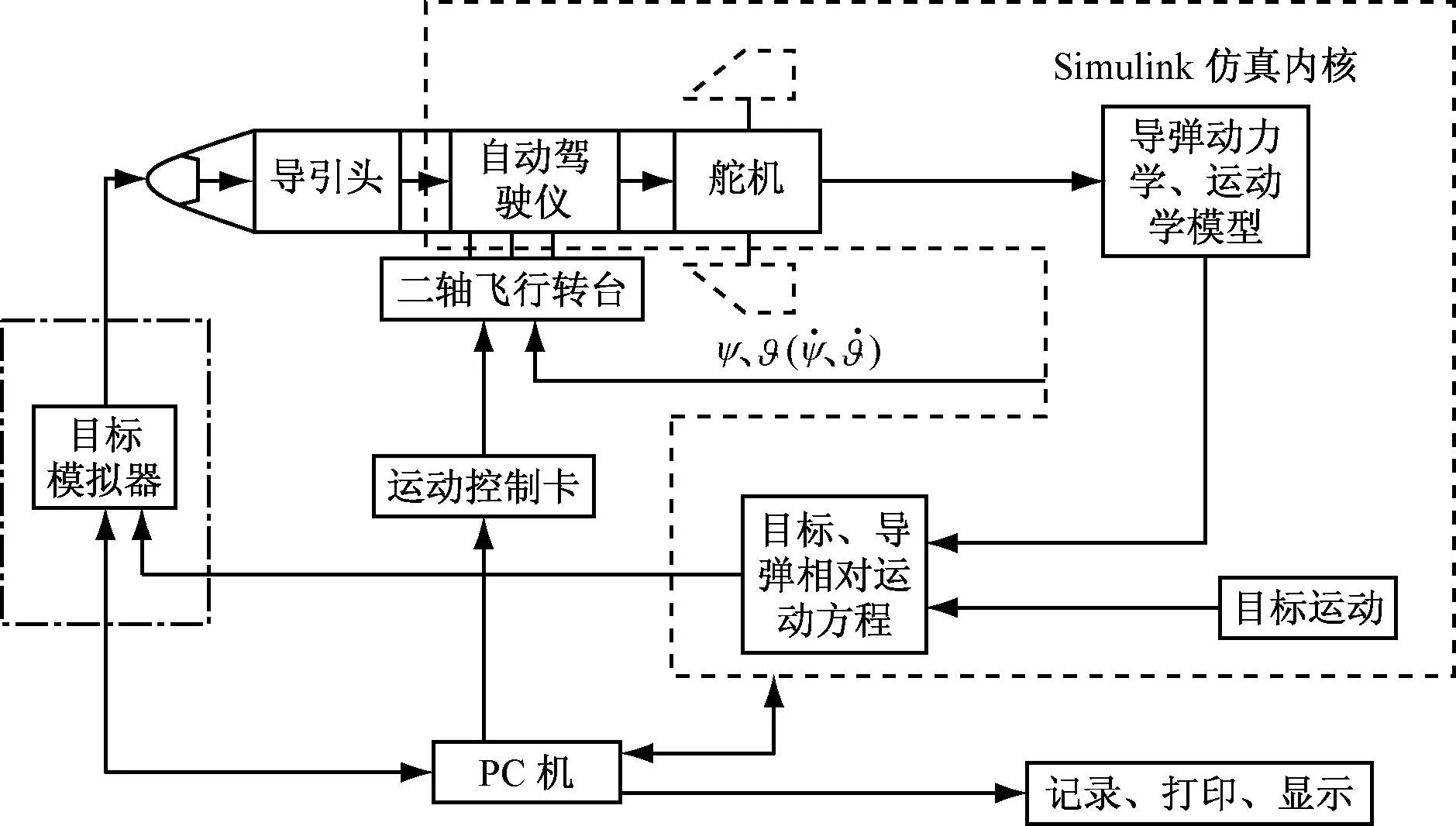
图2 实验平台设计结构图
图3 半实物仿真系统软件功能图
综上所述,从系统功能需求和教学需要出发,系统设计任务如下:
(1) 基于Simulink建立导弹制导控制系统模型并仿真验证;
(2) 运用RTW模块将Simulink模型转化为基于VC++的实时代码;
(3) 设计Simulink模型与VC++平台的I/O接口,并将两者封装为EXE仿真内核;
(4) 系统软件功能设计及人机交互界面的设计;
(5) 半实物仿真平台的功能测试。
2 导弹三自由度制导控制仿真
2.1 基于Simulink的导弹制导控制仿真
(1) 导弹纵向运动的数学模型[7-8]。导弹纵向运动微分方程描述如下:
dx/dt=vcosθ
dy/dt=vsinθ
m=673-0.12t,P=300,g=9.8
(2) 气动参数计算模块
X=Cxqs
Y=Cyqs
Cx=0.077 8·α+0.4
Cy=0.391 6·α-0.041
mz1=-0.093 4·α-0.003 6
q=ρv2/2
取弹体参数:S=0.12,xt=2.2,xp=4.7,bA=1.2,空气密度ρ=1.05,Cyδz1=0.06。
(3) 制导与控制系统模型
① 运动学环节:
弹目相对位置
xr=xm-x
yr=ym-y
弹目相对速度
弹目相对距离
弹目视线角速度
弹目相对距离变化率
② 自动驾驶仪设计。选择导弹的指令舵偏角为
经优化设计,得控制规律参数
Kpf=0.106,Kdf=2.312
③ 制导规律选取。选取广义比例导引法,则导弹控制系统的指令过载为
将上面各个模型的Simulink仿真模型连接起来得到三自由度导弹制导控制系统仿真模型总框图[5-8],如图4所示。
2.2 Simulink仿真模型的封装与调用[9-13]
导弹的制导控制仿真结构图通过Simulink自带的工具包RTW转化为C++代码,并设计I/O接口,最后封装为EXE仿真内核,在VC 6.0中进行调用。
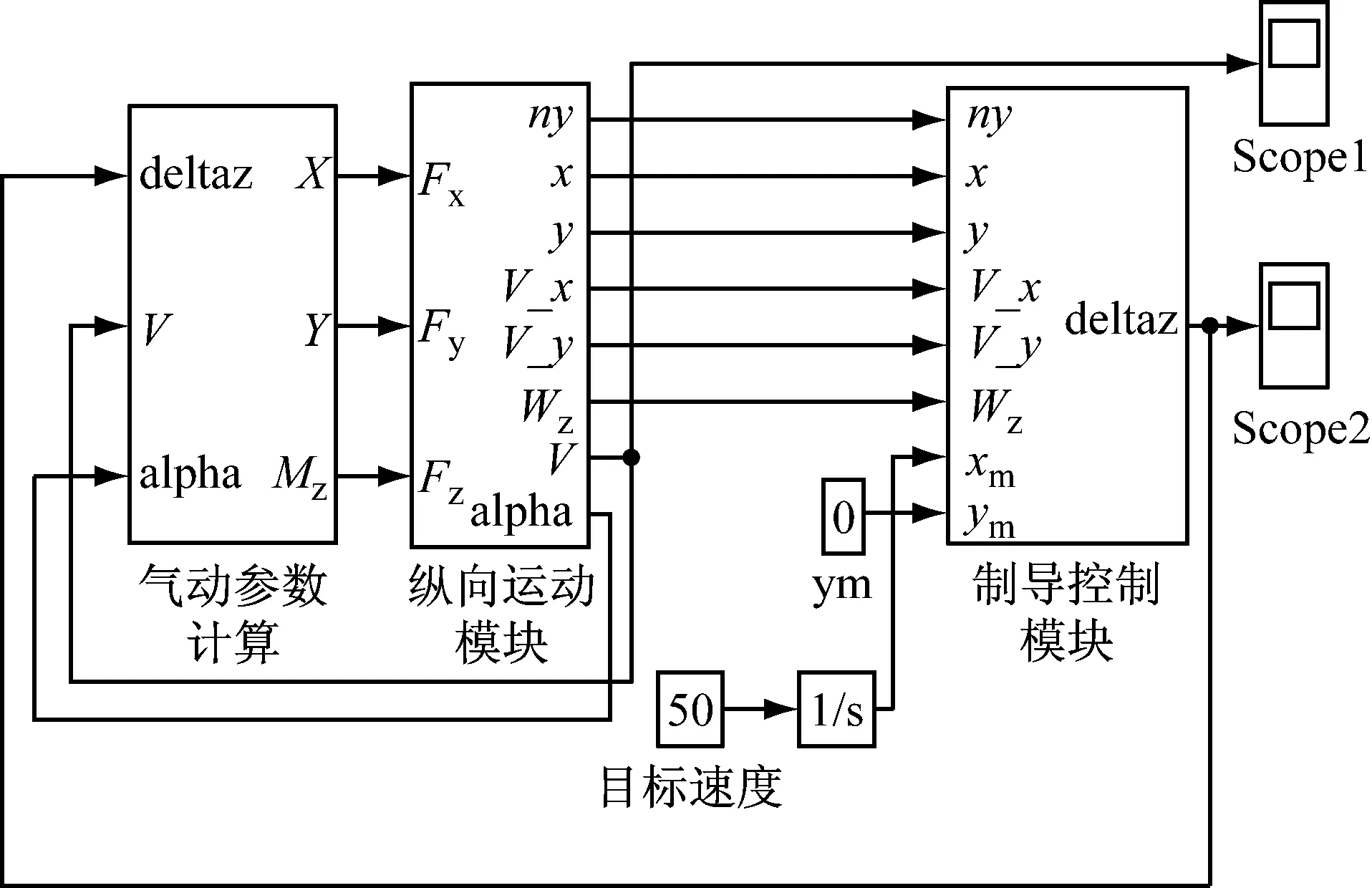
图4 导弹三自由度运动制导控制仿真模型图
2.2.1 仿真模型的封装
设置好RTW的各选项,步长50 ms,编译成功后,在VC 6.0中打开扩展名为mak的文件,VC 6.0会自动加载与程序有关的头文件和库文件。若运行程序,会生成.mat文件,其中包含了运行过程中各参数的数据,但VC 6.0不能直接读取.mat文件的数据,因此需要进行二次开发设置I/O接口。
2.2.2 I/O接口程序设计
编写I/O接口程序应注意RTW编译生成的cpp文件的初始化函数MdlStart,和输出结果的函数MdlTerminate,在MdlStart函数中添加读取参数设定初始值的程序,在源程序中找到每个outport,读取输出值,再在MdlTerminate函数中添加输出导弹、目标的运动学参数、动力学参数值的程序。待程序修改完毕,测试运行成功后,编译,连接,则会生成模型的EXE文件[14-15],且带有输入输出接口,这就是仿真内核,可以在VC 6.0中直接调用了。
2.2.3 仿真内核调用
在VC 6.0中调用仿真内核EXE文件,本文使用Windows自带的Windows API函数UINT WinExec(LPCSTR lpCmdLine,UINT uCmdShow),lpCmdLine:指向一个空结束的字符串,串中包含将要执行的应用程序的命令行(文件名加上可选参数);uCmdShow:定义Windows应用程序的窗口如何显示,并为CreateProcess函数提供STARTUPINFO参数的wShowWindow成员的值。
3 二轴飞行转台控制器的设计
在VC 6.0中建立一个基于对话框的MFC程序,由于仿真内核的仿真步长是50 ms,故每过一个步长,给转台一个控制信号,转台的运动控制采用库函数symmetry_relative_move(),可以一次性输入角速度和角度信号。转台采用闭环控制,将其设计为典型的Ⅱ型系统,因为该系统根据“谐振峰值最小原则”设计,跟随性能较Ⅰ型系统好得多,且调节时间短,根据工程经验,选择中频带宽度h=5,设计为“最佳Ⅱ型系统”。设置转台角度误差1°,满足条件时用库函数get_actual_pos()读取转台的角度信号并计算转台的角速度信号,作为仿真内核的输入参数,这样就把转台放在了回路中进行仿真,也即半实物仿真。
4 靶标探测与曲线显示
摄像头采集靶标图像进行处理,在人机交互对话框初始化函数中建立一个线程,来进行图像处理,具体流程是:① 图像二值化;② 图像腐蚀,滤掉小的物体;③ 灰度拉伸变换;④ 目标轮廓提取;⑤ 计算目标物体的质心。把物体的质心坐标按一定比例放大作为靶标的坐标显示于界面上。图像的显示是通过定时器采样,每隔200 ms采样一次。
导弹弹道、目标轨迹及各参数的变化曲线采用TeeChart Pro ActiveX控件。其中,导弹弹道、目标轨迹图采用三维坐标绘制,由于是三自由度仿真,将其中一个坐标设为常值。
5 人机交互界面设计及功能测试
5.1 人机交互界面设计
仿真系统主界面如图5所示,图中:① 区为弹道及目标轨迹显示区;② 区为导弹的初始运动参数及控制、控制器参数、导引系数输入区以及脱靶量的显示区;③ 区为导弹姿态的相关参数显示区及参数随时间变化的按钮;④ 区为靶标的初始运动参数输入区;⑤ 区为俯仰、偏航通道选择和目标识别及仿真操作区;⑥ 区为目标图像的显示区;⑦ 区为转台测试的相关操作区,有转台的输入信号测试(正弦输入、阶跃输入)和转台两个轴的开环操作,还有转台的控制参数显示。
5.2 导弹姿态控制半实物仿真功能
仿真开始前,必须先按下“转台回零”按钮使转台回归零位,进行姿态仿真时无需打开摄像头,先选择俯仰通道、偏航通道或俯仰+偏航,再直接从界面输入导弹和靶标的运动参数及控制参数Kpf、Kdf和导引系数K,然后点击“半实物仿真”按钮,系统开始运行,此时转台模拟导弹开始动作,界面上同时开始显示导弹弹道和目标轨迹,导弹相关参数也开始实时变化显示。本文选择“俯仰通道”,待仿真结束后,仿真系统界面见图5,也可以查看运动过程中导弹各参数随时间的变化情况,如点击“导弹俯仰角—时间曲线”按钮可以查看各姿态角随时间的变化情况(见图6),可以看出ϑ=α+θ。
5.3 目标探测与跟踪功能测试
仿真开始前,先进行转台回零,再选择仿真通道,然后打开摄像头,可以在交互界面的⑥区看到摄像头采集的目标图像(见图5),且在目标图像的中心有十字叉线,那就是目标的质心,点击“获取目标位置”按钮,目标的坐标自动填写到④区目标的初始运动参数编辑框中。再填写导弹的初始运动参数和控制器参数、导引系数,然后开始仿真,弹目距离最近时仿真结束。
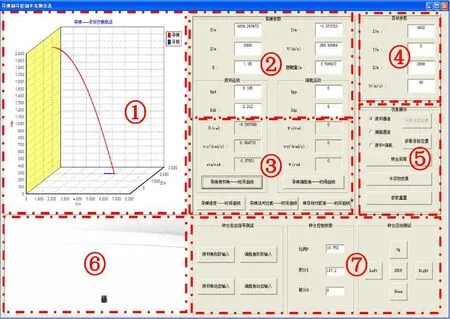
图5 系统人机交互界面

图6 导弹俯仰角、倾角、攻角随时间变化曲线
6 结 语
本文基于Simulink与VC++混合编程开发的导弹制导控制半实物仿真教学系统,具有友好的人机交互界面,可以实时显示参数变化及轨迹曲线,分别改变控制参数和导引
参数可以进行控制规律和比例导引规律的验证。该系统将已有硬件与专业课程实验相结合,充分开发了已有硬件的功能,涉及多种专业知识点,不仅能够激发学生对专业课学习的兴趣,而且能够使他们在实验中深化对专业知识的理解。
[1] 毕开波,王晓东.飞行器制导与控制及其Matlab仿真技术[M].北京:国防工业出版社,2009.
[2] 单家元,孟秀云.半实物仿真[M].北京:国防工业出版社,2013:7-8,14.
[3] 赵秋惠.空空导弹制导控制系统设计与仿真研究[D].西安:西北工业大学,2006.
[4] 刘根旺.飞行器控制系统设计与仿真实验平台的构建[J].实验室研究与探索,2008,27(3):26-28.
[5] 朱晓明,张淑芝.雷达监控半实物仿真教学系统设计[J].实验室研究与探索,2014,33(5):201-205.
[6] 夏 洁.舵机在回路的半实物飞控实验教学系统[J].实验室研究与探索,2012,31(9),14-17.
[7] 于秀萍,刘 涛.制导与控制系统[M].哈尔滨:哈尔滨工程大学出版社,2014.
[8] 李新国,方 群.有翼导弹飞行动力学[M].西安:西北工业大学出版社,2005:37-61.
[9] 李 颖.Simulink动态系统建模与仿真[M].西安:西安电子科技大学出版社,2009.
[10] 樊晓丹,孙应飞.一种基于RTW的实时控制系统快速开发方法[J].清华大学学报(自然科学版),2003,43(7),895-898.
[11] 刘 婕.Matlab/Simulink与VC++混合编程的实现[J].科学技术与工程,2012,12(16):4005-4007.
[12] 刘 维.精通Matlab与C/C++混合程序设计[M].4版. 北京:北京航空航天大学出版社,2014.
[13] 杨 涤,李立涛.系统实时仿真开发环境与应用[M].北京:清华大学出版社,2002.
[14] 侯晓波,左文英.基于Simulink与VC混合编程方法的研究与应用[J].自动化技术与应用(计算机应用),2010,29(11):29-32.
[15] 尧鹏飞,尹俊勋.一种Simulink仿真系统封装为可执行文件的方法[J].微计算机信息(测控自动化),2008,24(8),245-247.
Design of Missile Guidance and Control Hardware in the Loop Simulation Experiment System
YUXiuping,LIUTao,WUXinfeng,ZHANGHaoyu
(College of Automation, Harbin Engineering University, Harbin 150001, China)
In order to detect the need of guidance and control technology undergraduate study and experiment teaching, based on the two axis turntable photoelectric tracking system, we designed a teaching platform for missile guidance and control course with an in-loop simulation experiment. The platform is with two axis turntable as physical objects, the PC and motion controller as control platform. Through the turntable motion control library functions, position and speed control of turntable yaw pitch axis and axis is realized. By using Simulink visualization interface, kinematics and dynamics models of a missile are established. Inner loop attitude control loop and outer loop guidance loop are completed. With RTW technology, the model is transformed into code, after joining the I/O interface, the turntable is put into the circuit to carry out the in-loop simulation. The test results show that the system has a good teaching effect in the student experiment.
missile guidance and control; hardware in the loop simulation; Simulink; motion control; teaching experiment platform
2016-05-30
国家自然科学基金项目(51409059),黑龙江省自然科学基金资助项目 (F201342)
于秀萍(1963-),女,黑龙江哈尔滨人,博士,教授,主要从事飞行器控制方向的研究。
Tel.:13069897936; E-mail: yuxiuping@hrbeu.edu.cn
刘 涛(1979-),男,辽宁法库人,博士,讲师,从事飞行器控制系统仿真方面的研究。
Tel.:13836030076; E-mail: liutao@hrbeu.edu.cn
TJ 365
A
1006-7167(2017)02-0094-04
猜你喜欢
今日农业(2021年9期)2021-07-28
军民两用技术与产品(2021年10期)2021-03-16
世界农药(2019年3期)2019-09-10
成都信息工程大学学报(2018年4期)2019-01-23
信息安全研究(2018年12期)2018-12-29
北京航空航天大学学报(2016年9期)2016-11-16
北京航空航天大学学报(2016年7期)2016-11-16
光学精密工程(2016年4期)2016-11-07
新农业(2016年23期)2016-08-16
北京航空航天大学学报(2016年4期)2016-02-27
