中医按摩机器人关键技术研究进展
2017-04-12 06:28:10鲁守银李臣
山东建筑大学学报 2017年1期
鲁守银,李臣
(1.山东建筑大学信息与电气工程学院,山东济南250101;2.山东建筑大学机器人与智能系统研究院,山东济南250101)
中医按摩机器人关键技术研究进展
鲁守银1,2,李臣1
(1.山东建筑大学信息与电气工程学院,山东济南250101;2.山东建筑大学机器人与智能系统研究院,山东济南250101)
中医按摩机器人可以协助或代替医师完成按摩任务,国内外对中医按摩机器人的相关技术展开了研究,但仍有许多关键技术亟待解决。开展中医按摩机器人关键技术研究,有助于构建统一的中医按摩机器人系统技术架构,可为中医按摩机器人的产业化提供技术参考。文章围绕国内外按摩机器人的研究和应用现状,在对现有研究成果与中医按摩机器人实际应用需求分析的基础上,阐述了中医按摩机器人按摩手法机理及建模,运动机构的刚柔结构体的可靠性设计、伺服运动控制和穴位定位及经络轨迹跟踪伺服运动控制、控制系统体系结构设计、本体机械机构设计以及安全保护机制等关键技术问题,展望了中医按摩机器人的未来研究与发展方向以及未来需重点研究的关键技术问题。
机器人;中医按摩;穴位定位;运动控制
0 引言
中医按摩治疗是指用手或者其他肢体部位作用于人体表面,利用一定规律的力量和运动刺激人体穴位,促进血液循环、改善机体功能。中医按摩作为辅助治疗方法,遵循“自然疗愈理论”,通过增强免疫力的手段达到自然康复的目的,对保证身体健康有着重要的作用[1-4]。但迄今为止,中医按摩手法的操作仍需人工进行,体力消耗巨大,并且按摩疗效与按摩医师的水平和工作态度密切相关,按摩质量不统一,按摩手法因人而异,很难标准化。
按摩机器人是中医按摩手法在现代康复医学、人工智能、智能感知及机器人技术领域相互渗透、结合的高技术产物,它可以协助或代替按摩医生完成常规按摩手法的动作,可把按摩医师从繁杂的体力劳动中解放出来,并通过其精确的力/位置反馈控制使按摩手法更加规范,按摩治疗效果更加稳定。近10年来,中医按摩机器人研究引起了国内外很多学者和科研机构的兴趣,成为了医疗保健机器人研究领域的热点之一。目前,无论是在国内还是国外,机器人技术在中医按摩领域的研究和应用只是处于起步阶段,尚未有可以直接引用的技术标准[5-7]。
文章首先对中医按摩机器人目前取得的阶段性研究成果进行了介绍,其次对中医按摩机器人产品研发中必须解决的关键技术问题进行了分析,并对该机器人系统的各组成模块的技术规范进行了深入的探讨,有助于构建一个统一的中医按摩机器人系统技术架构,为中医按摩机器人的产业化提供技术参考。
1 国内外研究现状
中医按摩历史悠久,在周朝,人们就已经开始了按摩手法及其治疗效果的研究和总结,到唐朝时,按摩治疗相关疾病的方法就已经在临床治疗上得到了普及[8]。目前,按摩理论体系随着社会及科技的发展趋向统一,人们采用中西医结合的方法丰富了中医按摩理论,在传统的中医经络理论和中医手法的基础上,逐步形成了针对特定适应症的按摩方法,健全了按摩理论体系[9-12]。
借助于先进的科学技术,人们从按摩的方法、按摩的机理、按摩的装置和按摩的安全性等方面对按摩进行了广泛而深入的研究。秦杰等采用手套式的力觉测量设备对按摩手法中的滚手法进行了在体测量,从能量的角度分析了该手法在人体按摩过程中的作用效果[13],朱立国等通过提取力学参数的方法对旋转手法的操作过程进行动态测量[14],孙武权等利用实验探讨了按摩频率与手法的刺激量之间的相互关系[15]。
为了更好地推广中医按摩的临床应用,减轻按摩治疗师的劳动强度,机器人领域的一些学者、中医按摩行业的一些专家以及许多科研机构在将机器人应用于中医按摩方面也做了大量的尝试性研究工作[15],很多学者和研究机构对中医按摩辅助或装备以及按摩机器人技术进行了深入的研究[5,7,16]。Masao Kume率先展开了按摩机器人研究,开发了一款具有4个自由度的按摩机器人,采用力/位置控制的双闭环控制技术,实现了对肩部的“捏拿”按摩动作,并验证了利用机器人完成人工按摩手法的可行性[17]。Kang等研究了捶背按摩机器人,可以完成人体背部的按摩手法[18]。有研究者开发了一种具有力传感器的13个关节、4指按摩手的仿人手多指按摩机器人,通过按摩力量的离线示教,可控制按摩手实现多种按摩动作[19-21]。国内关于按摩机器人的研究,在2008年以前还大都停留在按摩机理分析和实验室试验或计算机仿真阶段,有些学者在按摩手法的建模和机械机构实现方面进行了大量的研究。如有研究者对按摩手法的机理进行了分析[22-24];有学者提出了基于并联机构的中医按摩机器人机型[25-27];余顺年等提出了混合型并联机器人构型[28]。
在国家“863”计划的支持下,山东建筑大学机器人技术与智能系统研究院开展了中医按摩机器人的研究[5],完成了中医按摩机器人功能样机的研制,如图1(a)所示。该机器人功能样机拥有2个按摩机械臂,每个机械臂的末端均安装有多功能按摩手,多功能按摩手采取仿人手结构,由5个手指组成,可实现“指揉”、“指按”、“掌揉”、“掌按”、“掌推”、“捏拿”、“滚压”、“扣击”、“振”和“颤动”等手法的按摩动作;机器人在进行按摩时,通过机器人视觉技术和人体穴位分布几何模型进行穴位的识别和定位,主要针对中老年退行性腰腿痛的中医按摩保健治疗进行了临床试验,证明了按摩机器人按摩手法治疗效果的有效性。2010年,为了提高其实用性,便于应用推广,在国家“863”计划的再次支持下,山东建筑大学对第1期中医按摩机器人样机的结构、外观等又进行了优化,研制出了具有单机械臂的中医按摩机器人产品化样机[6],如图1(b)所示。为了进一步降低机器人成本,便于机器人产品的市场推广,2015年山东建筑大学开始了中医按摩机器人系列化的研究,在前2代中医按摩机器人的研究基础上,又进行了第3代中医按摩机器人产品样机研制,其机器人总体结构如图1(c)所示。

图1 中医按摩机器人实验室样机图
2 机器人应用于中医按摩中的关键技术设计
中医按摩机器人主要由按摩机械机构、运动控制系统、上位机总控系统、生理指标检测系统等部分组成,其中机械机构包括运动机构、按摩装置、按摩调节床体平台等。该机器人直接和人体进行接触,动作稍有不慎,就可能对用户造成身体伤害,所以对其各项技术的安全可靠性要求很高,在进行按摩机器人研究开发过程中,其需要突破的关键技术有如下概述。
2.1 常规按摩手法机理分析及建模
按摩手法发展到今天,虽然形成了很多门派,按摩手法也多种多样,但其手法都要求基本动作具备有力、均匀、柔和、深透等特点。因此,要想很好地发挥按摩手法的治疗保健效果,要掌握掌推、掌按、指按、掌揉、指揉、捏拿、点、拍等常用按摩手法的人工按摩机理,掌握按摩手法的运动学和动力学特点,这样才能通过机器人来完成相应的按摩手法。
在进行某个按摩手法建模时,应重点考虑如下技术点:(1)相应按摩手法的着力点运动轨迹的运动学建模;(2)按摩过程中按摩力的动力学建模;(3)相应按摩手法的按摩动作重复频率;(4)人体经络连续轨迹按摩过程中,按摩装置柔顺力/位置控制问题。为了便于描述,需要首先建立如图2所示的坐标系,其中z轴和人体被按摩面相垂直,x轴和y轴与按摩面相平行,x轴为人体纵向,y轴为人体横向,α、β和δ分别为绕x、y和z轴的旋转角度。
以中医临床治疗老年退行性腰腿疼痛的按摩手法为例来进行分析,其所采用的中医按摩手法主要有滚压法、指揉法、捏法、掌按法和振法,对于这些常用的按摩手法很多学者进行了大量的研究[27-33],得出了一些常用按摩手法的运动学和动力学特征描述[25],见表1,其中输出矩阵内的“●”表示非期望输出为常数。

图2 按摩手法坐标系图
由表1可以看出这些按摩手法的实现,需要有多个自由度的机构协调运动才能实现,表1所给出的也只是实现上述按摩手法动作的最少机构自由度数量。要使按摩机器人运动灵活,就必须考虑机器人配有足够多的自由度数量及其相应的关节活动范围。
2.2 负载刚柔结构体的可靠性设计
安全可靠的机械机构是机器人能否正常工作的基本条件[5,7]。如何根据中医按摩手法的运动学及动力学特征设计出可行的按摩运动机构构型是进行中医按摩机器人产品研发要解决的首要问题之一[37-40]。针对中医按摩手法,很多学者进行了大量的研究,提出了很多种实现相关按摩手法的机械机构形式[26-28]。无论何种机构形式,在进行按摩机器人本体设计时都应考虑如下几项基本技术指标:(1)外形尽量简洁,减小患者心理上的排斥感;(2)机械臂具有较好的刚度,同时要求机械臂末端的按摩装置具有一定的柔性,在满足力量和精度要求的同时,保证按摩的安全性和舒适性;(3)具有足够的精度,满足按摩过程中穴位定位以及按摩轨迹控制的精确度要求,顺利地完成按摩动作;(4)具有足够灵活的机械机构,机器人在按摩时能到达指定的穴位,可对不同体型以及身体的不同部位实施舒适有效的按摩动作。

表1 中医按摩手法运动学和动力学特征
2.3 复杂结构下的自主按摩行为运动控制系统
中医按摩机器人在给患者进行按摩的过程中,患者的身体姿态很难保持长时间的稳定。为了保证时刻与患者的姿态相适应,机器人的姿态也要随时调整,因此,机器人运动过程中呈现出三维空间的复杂运动状态。另外,再考虑到按摩过程中按摩机械臂末端按摩装置所受到的摩擦力以及在背部、臀部、大腿和小腿等身体不同部位按摩时受到的阻力变化等其他未知环境和用户身体特点等因素的影响,要实现按摩机器人的按摩手法的自主控制与穴位或经络曲线的位置或力的精确跟踪是有一定难度的。所以,为了实现机器人在中医按摩领域的成功应用,提高按摩动作实现的自动化,实现按摩治疗方案自主生成,需要突破的关键技术问题有:
2.3.1 机器人运动学和动力学建模分析
要想实现机器人在中医按摩过程中的精确控制,首先要建立按摩机器人的运动本体机构的运动学模型和动力学模型。在进行按摩机器人动力学建模时,应首先要解决的技术问题如下:
(1)必须考虑按摩机器人作业过程中作业对象的柔性特点和人体姿态动态不确定性问题。按摩机器人的作业对象是人的身体,身体不同部位具有不同的刚柔度,所以机器人按摩作业时的作业环境也存在很大的不确定性,这将对按摩机器人按摩手法动力学建模带来很大的影响[33]。如当机器人按摩装置在背部按摩时,由于身体是凹凸不平的,需要一个向下的压力的同时需要沿按摩轨迹移动。在按摩过程中,患者在按摩力的作用下身体相关部位会产生前后及上下移动,这种移动会传递给床体,从而也会引起按摩机械臂振动,这样,按摩机器人和患者之间就形成了一个强耦合系统[37]。
(2)具有弹性特点的按摩床体平台、按摩装置和机械臂关节刚柔耦合机构的非线性特性研究[37]。为了提高机器人在中医按摩动作执行过程中的作业效率,机械臂的各关节连接杆件、零部件等应尽可能采取强度高的轻质材料,并要求具有快速响应能力。为了保证按摩机器人按摩过程中手法实现的位置/力精度和穴位位置/力跟踪精度,按摩机器人机械零部件的弹性效应是不能忽视的。因此,在研究按摩机器人动力学时,应该充分考虑按摩机器人的刚体运动过程中弹性振动带来的综合影响[44]。
2.3.2 机器人伺服运动控制
机器人按摩过程中,为了保证按摩手法的实现,按摩机器人要进行运动速度和位置的精确控制。在按摩机器人运动过程中,按机器人本体各部件受到的摩擦力以及在安装装置经过臀部、腰部到背部时机械臂抬起的高度不够时受到的阻力构成了机器人动力学控制中的不确定性因素,因此,这种情况下采用传统的PID控制方法可能无法达到运动控制的精度要求。所以,考虑到上述非线性因素和不确定性因素等对按摩机器人系统动力学非线性特性的影响,应结合机器视觉伺服控制、智能感知、神经网络、模糊控制、深度学习算法、遗传算法、自适应控制或鲁棒控制等先进控制策略,研究按摩机器人不确定条件下的精确位置/力控制[34-36,45-48]。
为了很好实现按摩机器人的按摩工作,每个患者的按摩治疗方案应根据其自身情况定制,还要考虑患者在按摩过程中的身体状况,根据患者的实时生理指标随时调整按摩流程。按摩机器人的控制系统需要处理的信息种类繁多,主要有(1)按摩医师或专家系统根据患者症状制定的按摩方案及其分解过后形成的机械机构动作序列;(2)患者生理指标实时信息;(3)机器人本体内部传感器反馈信息;(4)患者在按摩过程中的实时反馈信息等,还有按摩过程需要处理的控制信息,如图3所示。
2.3.3 机器人穴位识别与经络轨迹跟踪
中医按摩过程中穴位识别是非常关键的步骤,由于人体体型状态差异较大,导致穴位寻找的难度较大,这就要求按摩机器人具有更智能的控制策略。在中国传统医学中,常用同身寸作为人体穴位定位时的度量单位,虽然每个人的高矮、胖瘦体型均不相同,但是根据同身寸的原理,每个人的穴位几何分布图还是有规律可循的[34]。如果能找到几个关键的穴位,然后根据人体穴位几何分布图模型,就可以推算出其他穴位的坐标。在进行机器人按摩时,首先选定几个关键的穴位(一般3~5个);然后利用特征较为明显的标志点贴在所选定的上述关键穴位处,由按摩机器人的视觉系统自动识别出来[36],并与人体穴位分布图中相应穴位进行匹配,进而推算出其他穴位的坐标[43],完成患者人体穴位的初始定位。

图3 按摩机器人控制系统结构图
2.4 按摩机器人总控系统
在按摩过程中,如何对患者穴位或经络轨迹实时跟踪也是要解决的关键问题之一。为此,许多学者采用了视觉识别技术方案,获得了一些实验结果[34,36]。该视觉识别技术方案在按摩过程中实时采集分析用户的人体按摩部位图像,得到人体穴位标志点的坐标,通过对前后两幅图像穴位标志点坐标的比较,判断用户在按摩过程中的移动情况,并实现对标注点按摩穴位和经络的动态跟踪[34]。按摩机器人在进行按摩作业的过程中,穴位跟踪的实现方法如图4所示。
总控系统主要包括人机交互、机器人本体和控制系统三部分。其中控制系统主要包括按摩治疗方案专家系统、实时/历史数据库、生理指标检测、穴位定位及跟踪、示教控制、通信控制器等模块,主要负责按摩治疗任务的建模、按摩任务的规划调度、按摩手法的动作序列的规划和按摩动作的运动控制、按摩机构状态监控以及机器人状态异常处理、人机交互等任务[5]。
2.4.1 按摩控制系统体系结构
总控系统主要处理三类任务信息:机器人本体任务、患者和医师任务以及人机交互任务。其中,(1)机器人本体任务信息 主要包括机器人运动机构姿态信息、按摩手法模型描述、患者基本信息、人体生理指标实时信息、治疗方案实时信息、运动过程报警信息等;(2)患者和医师任务信息 主要包括患者基本信息、症状描述信息、按摩治疗方案、患者疼痛阈值、穴位标记点和患者生理信息、按摩进度监控信息;(3)人机交互任务信息 包括病情输入、疼痛阈值输入、治疗过程中监控、按摩信息、按摩位置自动采集、生理信息监控、机器人复位归零、按摩方案的调整和确定、按摩过程执行和终止。
基于以上需求,按摩机器人体系结构主要组成为:(1)人机交互系统 人机交互系统应由交互装置、专家系统、控制器、机器人本体四部分组成。(2)机器人本体 主要包括按摩调节床体平台、按摩机械臂、多功能按摩头等。(3)总控系统 总控制系统包括上位机控制器和运动控制器,上位机控制器应根据按摩任务和各个子系统的状态信息,完成按摩任务的分配、控制各个子系统协调运动。总控制系统的信息管理方式采取分层结构,在按摩过程中,其任务处理可分为四个主要的阶段,即诊断阶段、准备阶段、按摩治疗阶段和归档阶段,如图5所示。
2.4.2 基于多源信息反馈的专家控制按摩管理系统
与常规的工业机器人作业过程不同,在机器人按摩的过程中不但要实时监控机器人本体的运行参数,还要实时监控患者的生理指标参数,并根据这些参数来采取相应的控制策略[5]。推拿按摩的疗效与按摩师的水平经验密切相关,不同的病症需要不同的按摩理疗方案。中医按摩领域也需要一支庞大的按摩技术队伍,因此,为了制定较为可行的按摩诊疗方案应该采取专家控制系统。
在机器人进行按摩控制的过程中,专家控制系统依据专家库中的中医按摩专家知识和患者的症状,由推理机产生按摩治疗专家方案[53],同时根据机器人本体状态信息和用户实时生理指标数据,调整按摩动作序列中有关按摩指令,驱动按摩动作执行电机,完成相应的按摩动作。按摩专家控制系统是采用人工智能方法,模拟中医按摩医生根据中医知识和用户症状来制定按摩方案的专家经验来生成按摩治疗方案的一种智能化方法[6],专家系统包括人机界面、按摩知识专家库、治疗方案推理机等组成部分,图6给出了按摩专家控制系统的原理示意图。

图4 穴位跟踪定位流程图

图5 机器人按摩过程图

图6 中医按摩专家系统示意图
2.5 按摩机器人本体机构设计
中医按摩机器人本体机构主要包括摩调节床体平台、按摩机械臂、床体升降机构、驱动机构、按摩装置等部分组成,如图7所示。按摩调节床体平台主要由床架升降机构、升降驱动机构、床架固定机构、床板等组成。在床体上部安装有支撑架,机械臂可以安装在支撑架上。中医按摩机器人的按摩调节平台主要由可升降的床体、床板等组成,如图8(b)所示。为保证使用者的安全,按摩调节平台应设置快速下降的功能,当遇到特殊情况时,使床体迅速下降,从而保证患者的安全[5]。
按摩装置安装在机械臂的末端,如图8(a)所示,能够仿人工按摩手法完成相应的中医按摩动作。按摩装置主要包括固定支撑部件、连接部件和按摩执行装置三部分。按摩执行装置左侧板部件上安装固定有手腕电机,手腕电机的电机动力轴与连接部件的左摇臂相连,按摩执行装置的右侧板部件上固定安装有与电机轴动力同轴的电机防护总成,电机防护总成与连接部件的右摇臂相连,可以绕电机动力轴旋转,按摩装置结构图如图8(b)所示。在手指以及各关节处都装有传感器,实时测量按摩过程中手指以及各关节力的大小以保证患者以及机器人本体的安全,下图为按摩装置力传感器布置结构示意图,如图8(c)所示。

图7 中医按摩机器人本体机械机构图
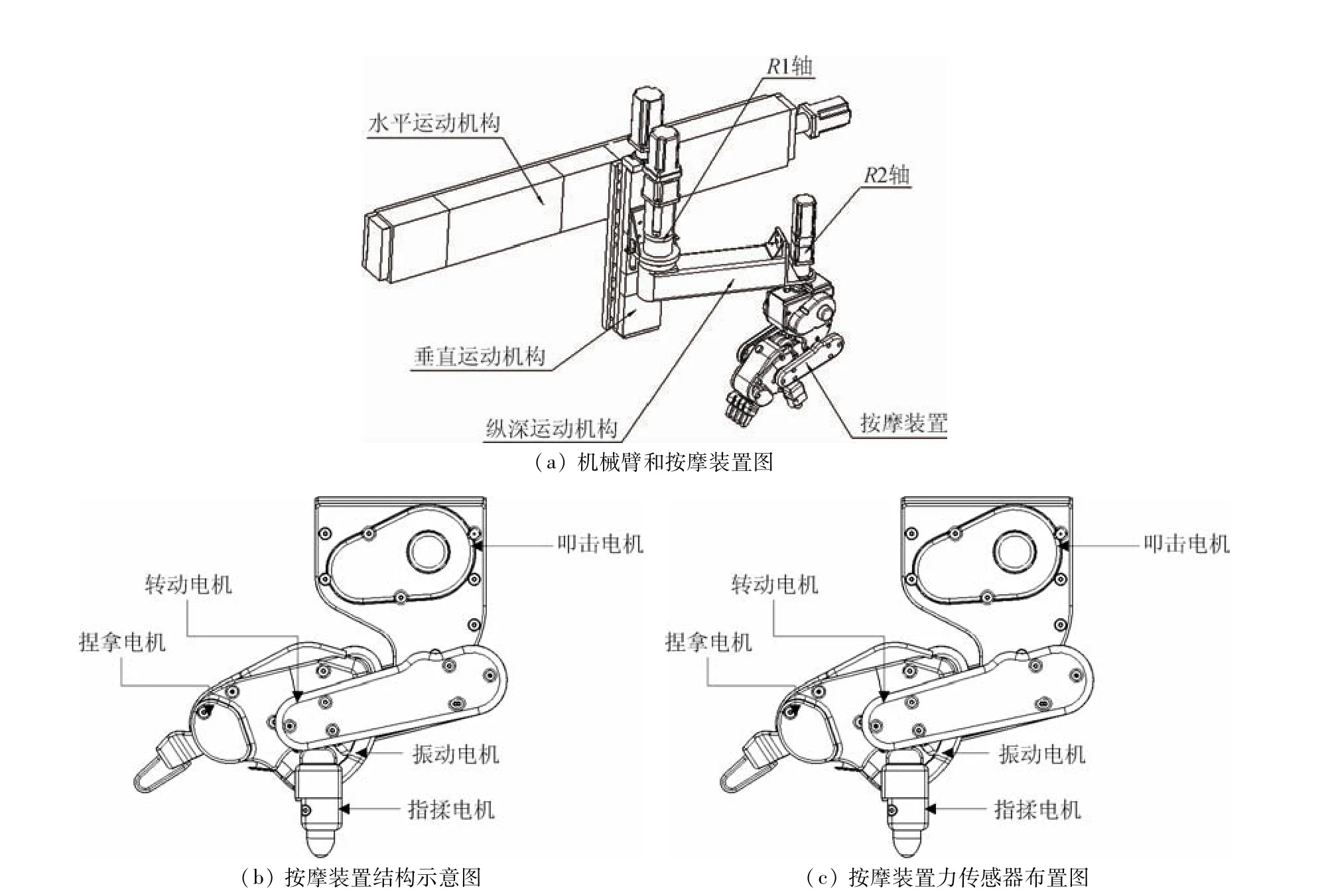
图8 机械臂及按摩装置示意图
2.6 按摩机器人的安全保护机制
按摩机器人的工作对象是人,为保证其安全可靠地工作运行,必须研究按摩机器人的安全保护机制,主要包括:安全电压保护机制、急停触发保护机制、机械结构保护机制、抗电磁干扰保护机制。其中,急停触发保护机制和机械机构保护机制是研究的重点。
急停触发保护机制 急停触发有急停按钮触发、压力反馈值过大触发、生理指标异常触发、限位开关触发以及上位机急停触发。当患者在按摩过程中身体感到异常时可通过手中的急停按钮使按摩紧急停止,当上位机采集到到按摩装置上的压力传感器压力值过大或检测到生理指标异常(如血压上升、心跳加速等)时,按摩手停止动作,z轴并向上运动,异常解除后可继续按摩。
机械机构保护机制 机器人在进行机械结构设计时在特定的关节以及滑动机构设置机械限位或安装限位开关保证机器人的安全运行;为保证使用者的安全,按摩调节床体平台应该考虑平台手工快速下降动作的实现,在机器人系统紧急断电时,通过按摩调节平台的快速下降使按摩手或按摩装置与人体快速脱离保证使用者的安全。
3 展望
随着机器人在中医按摩领域的研究和临床应用的开展,已经对一些关键技术进行了较为深入的探讨,部分关键技术也取得了一定的进展。虽然也研制完成了实验室功能样机和产品样机,但是要作为产品安全可靠地进行大面积临床应用,按摩机器人尚有很多关键技术有待突破。未来按摩机器人的发展要求机器人在复杂环境下具有更高的适应性、自主性及可靠性,智能化与自主化是按摩机器人的发展趋势。为了加快中医按摩机器人的产品研制速度,促进机器人技术在中医保健行业的应用,建议未来的研究和应用应考虑如下几个方面的工作:
(1)专家控制在线管理系统 基于多源信息反馈的专家控制在线管理系统要实时监控患者的生理指标参数,根据患者的生理反馈信息与专家知识库的知识经验生成治疗方案;不同体型及患者身体的不同部位要根据专家系统实施不同的按摩治疗方案,患者身体不同部位施力的大小、方向、频率都要根据专家系统实时在线生成。
(2)机械机构优化 探索新材质提高按摩手的柔韧度,提高按摩手的按摩舒适度,优化按摩机器人本体结构,使机器人外形尽量简洁,减少患者的心理排斥感。
(3)多传感器信息融合技术 根据采集到的患者的生理指标参数以及各处力传感器的反馈信息,利用多传感器信息融合技术,结合专家系统生成并实施不同的按摩治疗方案,提高按摩过程中的安全性与舒适性。
(4)相关标准与技术规范 对按摩机器人进行改进、定型,形成按摩机器人产品量产、临床应用技术规范以及按摩机器人产品技术质量监管等相关产品标准或技术规范,扩大机器人技术在医疗保健服务行业的应用领域。
[1] 冯燕华.试论中医推拿与西方按摩的异同和发展[J].按摩与导引,1999,88(4):4-6.
[2] 黄健,郭丽娃.古代自然疗法的发展与东西方传统文化[J].医学与哲学,1992(1):52-53.
[3] Billhult A.,Stener V.E.,Bergbom I..The experience of massage during chemotherapy treatment in breast cancer patients[J].Clinical Nursing Research,2007,16(2):84-99.
[4] Hymel G.M..Advancing massage therapy research competencies:dimensions for thought and action[J].Journal of Bodywork&Movement Therapies,2003,7(3):194-199.
[5] 高焕兵,鲁守银,王涛,等.中医按摩机器人研制与开发[J].机器人,2011,33(5):553-562.
[6] 刘玲云,鲁守银,张营,等.中医按摩机器人专家控制系统的研究[J].计算机测量与控制,2016,24(4):55-57.
[7] 胡磊.按摩机器人关键技术研究[D].哈尔滨:哈尔滨工程大学,2015.
[8] 刘柏龄.我国伤科手法治疗的渊源、发展及应用[J].新中医,1984(3):4-7.
[9] 王端祥.浅论按摩疗法的基本原理与进展[J].按摩与康复医学,2004,20(6):56-57.
[10]郭郡浩.推拿治疗适应症近况[J].按摩与康复医学,1999(1):9-10.
[11]赵振丰.震颤推拿治疗胃脘痛38例临床观察[J].中国科技信息,2007(11):201,203.
[12]王亮.足部按摩应激治疗高血压危象100例临床体会[J].双足与保健,1994(1):17-19.
[13]秦杰,赵鹏,刘家勇,等.在体手法测量系统对(扌衮)法的生物力学分析[J].中医正骨,2004,16(12):4-5.
[14]朱立国,冯敏山,毕方杉,等.颈椎旋转(提)手法的在体力学测量[J].中国康复医学杂志,2007,22(8):673-676.
[15]孙武权,严隽陶.推拿手法频率的理论探讨与实验研究[J].按摩与导引,2002,18(5):2-4.
[16]Kume M.,Morita Y.,Yamauchi Y.,et al..Development of a Mechanotherapy Unit for Examining the Possibility of an IntelligentMassage Robot[C].Osaka:International Conference on Intelligent Robots and Systems,1996.
[17]Jones K.C.,Du W..Development of a Massage Robot for Medical Therapy[C].Kobe:International Conference on Advanced Intelligent Mechatronics,2003.
[18]Kang C.G.,Lee B.J.,Son I.X.,et al..Design of a Percussive Massage Robot Tapping Human Backs[C].Kobe:The IEEE International Symposium on Robot and Human Interactive Communication,2007.
[19]Terashima K.,Kitagawa H.,Miyoshi T.A.,et al..Modeling and massage control of human skin muscle by usingmulti-fingered robot hand[J].Integrated Computer-Aided Engineering,2006,13(3):233-248.
[20]Mouri K.,Terashima K.,Minyong P.,et al..Identification and Hybrid Impedance Control of Human Skin Muscle by Multifingered Robot Hand[C].San Diego:International Conference on Intelligent Robots and Systems,2007.
[21]Teramae T.,Kushida D.,Takemori F.,et al..Control Strategy for the Massage Chair Based on Human Skin Elasticity[C]. Kagawa:SICE Annual Conference,2007.
[22]丁宝清.浅论反射疗法按摩手法之理[C].反射学全国研讨会会议交流文集.北京:中国足部反射区健康法研究会,2006.
[23]周太安,宋俐荣.理筋手法研究方法初探[J].中国骨伤,1997(3):39-40.
[24]程静茹.中医推拿按摩,讲究手法[J].健身科学,2014(10):35 -35.
[25]余顺年,马履中,陈扼西,等.新型串并联中医推拿机器人研究[J].中国机械工程,2005,16(19):1773-1778.
[26]马履中,姚国营,倪前磊,等.实现滚法中医推拿并串混联机器人的研究[J].机械设计与研究,2005,21(6):43-46.
[27]余顺年,马履中,郭宗和.中医推拿手法运动学与动力学特征分析[J].山东理工大学学报:自然科学版,2005,19(3):82-85.
[28]余顺年,陈扼西,马履中.基于并联机构中医推拿机器人机型研究[J].工程设计学报,2006,13(6):400-405.
[29]张伟.机器人按摩手法与控制技术研究[D].南京:东南大学,2013.
[30]杨国亮,余顺年.新型中医推拿混联机器人按摩“力度”模型[J].机电技术,2012(5):2-4.
[31]吕杰,曹金凤,方磊,等.中医屈指推法的生物力学建模及分析[J].中国组织工程研究与临床康复,2011,15(17):3183-3186.
[32]马惠昇,张宏,苗志杰,等.推拿(扌衮)法动力学参数优化实验研究[J].中国康复医学杂志,2006,21(12):1116-1118.
[33]陈守吉,严隽陶.中医推拿摆动类手法的动力学研究:(I)生物力学模型及方程[J].医用生物力学,1996(2):112-116.
[34]张化凯,鲁守银,杜光月.基于模板匹配的穴位定位与跟踪研究[J].科技通报,2011,27(5):666-670.
[35]王洪玲.刘存根基于模糊控制器的按摩机器人的力度控制[J].山东建筑大学学报,2010,25(6):586-590.
[36]张化凯.基于视觉的中医按摩机器人穴位定位与跟踪系统[D].济南:山东建筑大学,2012.
[37]马培良,刘相秋,李根成.考虑刚柔耦合的机构运动可靠性研究[J].航空兵器,2014(2):58-60.
[38]戴学丰,孙立宁,刘品宽,等.柔性臂机器人控制算法综述[J].电机与控制学报,2002,6(2):158-161.
[39]谢俊,张俊,马履中,等.中医推拿机械臂机构设计及运动仿真[J].工程设计学报,2011,18(5):344-348.
[40]陈鹏,刘璐,余飞,等.一种仿人机械臂的运动学逆解的几何求解方法[J].机器人,2012,34(2).
[41]赵庆波,赵德安,姬伟,等.采摘机器人视觉伺服控制系统设计[J].农业机械学报,2009,40(1):152-156.
[42]李明富,马建华,张玉彦.基于机器人的空间坐标测量技术研究现状及发展趋势[J].机械科学与技术,2014,33(12).
[43]王东署,迟健男.机器人运动学标定综述[J].计算机应用研究,2007,24(9):8-11.
[44]曾京,罗仁.考虑车体弹性效应的铁道客车系统振动分析[J].铁道学报,2007,29(6):19-25.
[45]赵建东,邵黎君,徐凯,等.基于CAN总线的仿人机器人关节伺服控制系统研究[J].机器人,2002,24(5):421-426.
[46]王耀南,李树涛.多传感器信息融合及其应用综述[J].控制与决策,2001,16(5):518-522.
[47]孙斌,杨汝请.开放式机器人控制器综述[J].机器人,2001,23(4):374-378.
[48]程玉虎,易建强,赵冬斌.机器人行为协调机制研究进展[J].机器人,2004,26(2):187-192.
[49]刘庆运,钱瑞明,颜景平.机器人多指手抓取运动学研究综述[J].机械科学与技术,2006,25(8):967-971.
[50]宫金良,张彦斐,高峰.机器人末端运动特征描述方法[J].机械设计,2006,23(11):16-18.
[51]高云峰,吴秀芬.服务机器人视觉系统模块化研究综述[J].机械设计与制造,2010(2):165-167.
[52]杜滨,赵京.移动机械臂平台位置优化及运动规划[J].高技术通讯,2013,23(5):546-552.
[53]王克,库祥臣,李济顺.专家系统在编制弹簧卷绕工艺中的应用[J].机床与液压,2010,38(6):4-6.
Research progvess of key technology of Chinesemedicalmassage robot
Lu Shouyin1,2,Li Chen1
(1.Schoolof Information and Electrical Engineering,Shandong Jianzhu University,Jinan 250101,China;2.Robotand Intelligent Systems Research Institute,Shandong Jianzhu University,Jinan 250101,China)
The Chinese medica massage robot,which can assist or take the place of the massage technician to achieve the task of massage,has been studied by a lot of researchers or scientific research institutions in recent years.However,there are stillmany key technologies to be solved.The research on the key technology of Chinese medical massage robot is helpful to build a unified technology framework,which can provide technical reference for the industrialization of Chinese medicalmassage robot.The research and application of the massage robot at home and abroad are introduced,and the systematic analysis and in-depth summary of the achievements in this field are given.According to the existing research results and practical demand analysis,key technologies of the massage robot are deeply discussed,including mechanism analysis and modeling of massage manipulation,the design of massage movementmechanism of rigid flexible coupling structure with high reliability,acupoint positioning and meridian locus tracking servo motion control,system structure ofmassage robot control system,body mechanicalmechanism ofmassage robot and safety protection mechanism ofmassage robot.The future research and development direction of traditional Chinesemedicine massage robot is prospected,and the key technology issues to be studied in the future are discussed.
robot;Chinesemedicalmassage;acupoint location;movement control
TU996
A
1673-7644(2017)01-0060-09
2016-12-01
国家863计划资助项目(2010AA040201);山东省科学技术发展计划项目(2014GGX103002);山东省科技重大专项计划项目(2015ZDXX0801A03)
鲁守银(1968-),男,教授,博士,主要从事智能控制与智能机器人系统等方面的研究.E-mail:sdznjqr@163.com
猜你喜欢
今日农业(2021年19期)2022-01-12 06:17:04
快乐语文(2021年11期)2021-07-20 07:41:42
今日农业(2020年15期)2020-12-15 10:16:11
当代工人(2020年8期)2020-05-25 09:07:38
广东第二课堂·初中(2020年3期)2020-04-02 07:08:33
华人时刊(2019年13期)2019-11-17 14:59:54
中国生殖健康(2019年9期)2019-01-07 01:18:56
小溪流(画刊)(2017年12期)2018-01-10 16:07:29
科技知识动漫(2016年8期)2016-07-29 20:40:09
儿童故事画报·发现号趣味百科(2015年12期)2016-01-25 00:41:49