智能PID控制器在船舶发电机电压控制中的应用
2017-04-11 05:12付亮
科学与财富 2017年7期
付亮
摘 要:应对船舶发电机在发生负荷突变,特别是大负荷突变之时,实现对发电机端电压值的有效稳定,是控制系统所亟需解决的一项基础问题。对此本文就提出并应用了一种新型的智能PID控制器系统,其中PID控制器主要采用三层前馈神经网络构成,借助于神经网络的自学习能力,PID控制器的参数可依据系统动态特性通过神经网络权系数自行调节,其主要的特点为结构简易、运行稳定。依据仿真实例验证表明,此智能PID控制器相较于传统同类控制器而言在扰动相应速度与控制效果方面均得到极为明显的提升,可有效稳定船舶发电机端电压。
关键词:PID控制器;船舶;发电机电压;励磁系统;神经网络
船舶电力系统最为突出的一个特点即为发电机容量相对偏小,而负载的容量则较大;多台机组所并联工作,并联与解列转换起来十分频繁,由此也就导致了船舶电站的运行工作成为了一个动态化演变的过程,难以实现真正的稳态过程。在进行系统设计之时,时常会遭遇到非线性动态问题,依据智能控制理论来开展控制器的设计工作,将会使得其优势特点极大的体现出来。据此,下文将就智能PID控制器在传播发电机电压控制中的具体应用展开深入的探讨。
一、电力控制系统及智能PID控制器概述
电力系统控制是一项十分繁杂的控制问题。目前所现有的控制方法主要就包括了线性最优控制、自适应控制、H∞鲁棒控制、智能控制等。近些年来又涌现出来了模糊逻辑、神经网络、遗传算法以及DNA算法等智能技术所集成出的混合智能系统在电力系统当中也有所应用。混合智能系统通过对各类智能技术特点的应用,例如对模糊逻辑的知识表达与推理能力应用,神经网络的知识获取、学习及适应与容错能力,以及遗传算法的优化能力等,将这些诸多的能力进行有效的结合,从而为电力系统大量问题的解决提供以有效的手段方法。
当前在船舶电力系统励磁回路之中所普遍应用的是传统的PID控制手段,而这一控制手段的优势即为:对数学模型没有较高的要求、控制算法的整体结构也较为简易、实现方式较为简便,同时也较易成熟,设计人员应用起来十分简便。基于神经网络的模糊自适应PID控制方案,一方面通过应用模糊逻辑概念与非线性处理方式,另一方面则通过应用神经网络的自学习能力与任意函数的接近能力,将此两者进行适当的结合从而获得最为有效的PID非线性组合控制规律,进而达成对未知对象予以在线控制的目的。
二、系统构成
为了处理船舶发电机在符合发生改变特别是大负荷改变之时,可以更加有效的应对发电机一端的电压问题,便设计出了一类架构于BP神经网络系统之上的自适应智能PID控制设备,通过应用神经网络自学习能力,PID控制設备的可依据系统动态化特点来经由神经网络权系数予以自主调节,智能PID控制器则是通过三层前馈神经网络所构成,主要的特点即为结构简便、工作稳定,系统结构主要由以下四部分构成:
1)传统PID控制器:由PID控制器与发电机所共同组成的闭环控制系统,PID阐述通过神经网络来达成实时调节。
2)量化模糊:针对系统所出现的各种变量因素采取模糊处理。
3)神经网络NN1:(下图1)采取系统辨识,给予NN2创造以具体的发电机组动态过程信息。
4)神经网络NN2:获得系统最优化控制后的PID控制器参数信息。
三、仿真实例分析
将某大型集装箱船舶发电机系统作为研究对象展开仿真探究,船舶的发电机组为了获取到系统训练数据,针对此集装箱船的船舶发电机实际系统首先采取常规建模,将相关的系统输入及输出数据进行明确的记录,同时将相关的数据内容充当为对智能PID控制器进行训练的样本。将实际船舶的具体数据与《钢质海船入级与建造规范》将主要发电机的动态电压改变情况以及静态电压的改变情况要求作为主要依据来就智能PID控制器的应用效果予以评判,主发电机骤然增加或减少50%的负载,其发电机的动态电压变化情况应当处于±15%之内,待电压值恢复正常后,在1.5s之内,静态电压的变化情况应回归到±2.5%之内。
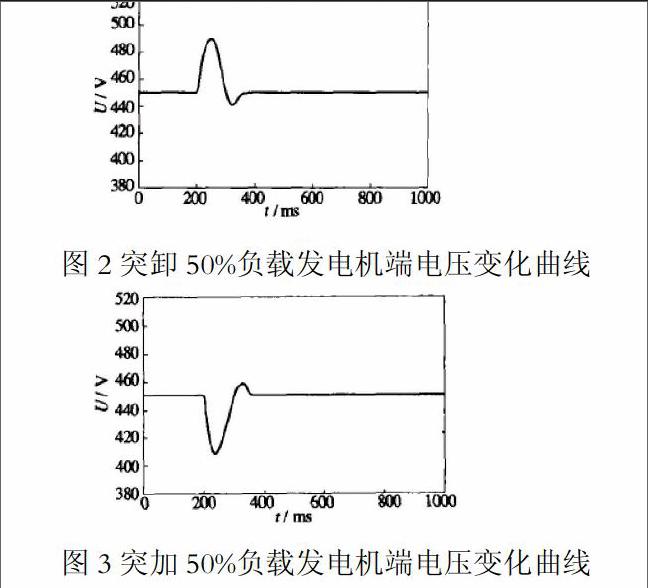
突然卸载50%的负载电压,其仿真曲线详见下图2。观察下图2的仿真结果:在突然卸载了50%的负载以后,发电机的动态电压最大值升高到了490V,其变化率约为+9%,并可在0.17s之内达到稳定范围,主发电机的静态电压改变情况低于2.5%,并完全符合标准要求。
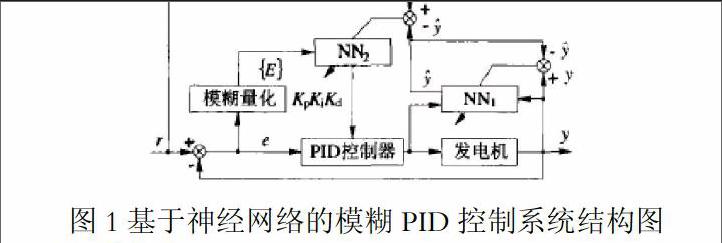
突然增加50%的负载电压,其仿真曲线详见下图3,。观察图3的放着结果:在突然增加了50%的负载之后,发电机动态电压的最低值将达到410V,其变化率约为-9%,在0.17s之内可达到稳定范围,主发电机的静态电压改变情况低于2.5%,并完全符合标准要求。
依据对上图2、图3的观察可知,此智能PID控制器具备较为良好的控制效果及鲁棒性,完全符合标准规范的要求以及实际船舶测量所得到的具体数据信息。
结束语
在船舶发电机端的电压是通过励磁控制系统来使之趋向于稳定的,发电机与励磁控制系统均为极其复杂的非线性动态化系统。在本次研究中所提出的智能PID控制器设备能够直接改善船舶发电机在负荷发生改变特别是大负荷改变之时,可对发电机一端的电压值起到良好的稳定作用。其主要的特点为结构简单、工作稳定,通过对仿真实例的分析,可得出此控制器对系统扰动的反应速度较快,同时其控制效果也较为良好,基于负载变化之时,可以对稳定发电机一端的电压值起到较好的稳定效果。相信随着有关智能PID控制器研究的不断深入,其必将在智能船舶的发展过程中发挥出越来越重要的作用价值。
参考文献:
[1]王荣杰,詹宜巨,周海峰等.基于差分进化机理优化的PID控制的AVR系统[J].电力系统保护与控制,2015,(24).
[2]欧阳松,汪敏.船舶发电机组的励磁系统模糊PID控制研究[J].船电技术,2015,(5).
[3]周左晗,施伟锋.船舶无刷发电机励磁控制系统的数字仿真[J].计算机仿真,2013,(6).
[4]李宗泽,史成军.基于二维云模型同步发电机PID励磁系统仿真[J].电力系统保护与控制,2016,(7).
猜你喜欢
船舶(2021年4期)2021-09-07
小哥白尼(趣味科学)(2019年10期)2020-01-18
电子制作(2019年19期)2019-11-23
船舶标准化工程师(2019年4期)2019-07-24
中国船检(2017年3期)2017-05-18
科技视界(2016年21期)2016-10-17
重型机械(2016年1期)2016-03-01
大连工业大学学报(2015年4期)2015-12-11
海军航空大学学报(2015年4期)2015-02-27