激光传感器在喷雾靶标检测中的研究应用
2017-04-10 00:56:10沈跃夏伟刘慧李宁
农业现代化研究 2017年2期
沈跃,夏伟,刘慧,李宁
(江苏大学电气信息工程学院,江苏 镇江 212013)
激光传感器在喷雾靶标检测中的研究应用
沈跃,夏伟,刘慧,李宁
(江苏大学电气信息工程学院,江苏 镇江 212013)
树木尺寸、形状等特征信息的获取,是现代化农业中重要的环节,为农林管理中的变量精密喷雾提供依据。为了实现对树木靶标信息的精确测量,搭建了基于UTM-30LX型激光传感器的室内滑台靶标检测系统,实现对规则物体、仿真树的扫描检测,通过编写的C++程序,实时读取数据信息并存储于控制计算机中。利用MATLAB软件对存储的数据信息进行后期的离线分析,重构物体三维图像,通过最大相对误差、轮廓相似度两个参数,分析激光传感器检测得到靶标目标尺寸、重构目标三维图像的精确度。以长方体柜子、圆柱体泡沫、2棵仿真树为试验对象,按照选取的3个检测距离和4个检测速度分别对4个试验对象进行检测与数据分析。试验结果显示,多次试验下,与人工测量尺寸比较而言,激光传感器测得的长方体柜子长度、宽度和高度尺寸最大相对误差分别为6.76%、6.86%和3.92%,圆柱体泡沫的高度、直径尺寸最大相对误差分别为4.25%和7.33%,仿真树1高度、宽度尺寸最大相对误差分别为4.06%和5.91%,仿真树2高度、宽度尺寸最大相对误差分别为3.24%和4.00%;仿真树1、2的激光扫描重构图像与对应实物轮廓相似度最小值分别为0.928 8和0.932 6。研究表明,UTM-30LX型激光传感器在各种试验条件下对多种试验靶标特征检测均具有较好的精确性和准确性,可以担负变量喷雾检测的任务,具有应用到农业生产中的前景。
现代化农业;变量精密施药;激光传感器;靶标检测系统;三维图像
苗圃、果园里成行种植的树木,形态、位置及叶子的密度各不相同。传统的喷雾机不能根据树冠特征的变化改变喷洒速率[1-3],不仅造成农药的大量浪费,还导致了环境污染问题。基于实时传感器的变量喷雾技术则根据目标有无、形态、叶子密度等具体特征信息,调整喷嘴的喷洒速率,精确控制农药的用量,减少了农药的使用量,减轻了环境的污染[4-6]。而在此过程中,对于喷雾靶标的检测显得尤为重要,它是后期喷雾动作执行的依据和前提。
对于目标植株轮廓及特征信息的检测,目前应用较为广泛的是基于红外传感器、超声波传感器、三维激光扫描仪等技术的检测手段。基于红外传感器的靶标检测装置,在一定程度上能实现对目标位置的准确检测,但由于受到传感器自身条件的限制,该技术无法检测出目标具体大小、尺寸等特征信息[7-9]。基于超声波传感器的树木冠层的检测装置,能弥补红外检测装置的不足,不仅能检测到植株目标的有无,还能实现对其体积的粗略检测,但检测过程中存在有回波干扰、采样频率不高的问题[10-13]。也有学者采用三维激光扫描仪来检测树木,通过获取三维的点云数据,再结合分段体积求和、体云模拟法、分形算法等方法,实现对树木冠层的测量[14-18],注意到,此种方法存在如下的问题:三维激光扫描仪的价格昂贵,高达100万元左右;仪器不易操作;采集的冠层点云数据量大,导致后续的数据处理过程繁琐耗时。要实现高效精密地检测喷雾靶标的特征信息,同时又要经济实用,这对实时传感器的选取提出了更高的要求。
本文主要针对现有研究中的红外传感器、超声波传感器和三维激光扫描仪自身功能的特点以及实际应用的局限性,提出将一种型号为UTM-30LX型的二维激光扫描传感器应用在植株冠层的检测作业中,旨在提高喷雾靶标检测的精确性,为基于树木特征的精密变量喷雾技术提供试验依据。
1 材料与方法
1.1 激光传感器
本研究采用日本北阳(Hokuyo)公司生产的UTM-30LX型二维激光传感器。二维激光扫描仪价格比起三维激光扫描仪便宜很多,传感器检测的是一个面,通过滑台带动其直线运动,结合运动方向数据获得三维数据,喷雾时跟随喷雾机车的行走自然获得三维数据,进而获得靶标的特征信息,经济实用。通过验证其检测树冠的精确性能,为精密变量喷雾应用领域提供一定的数据参考。传感器的扫描角度范围为270°,角度分辨率为0.25°,有效检测距离为0.1 m到30 m,扫描周期为25 ms,检测精度10 m以内为±30 mm,10-30 m为±50 mm,重量约为210 g,具备一个通用的USB接口,所需供电电源为12 V的直流电源。基于TOF(time of fight)原理实现与物体表面轮廓的距离测量,工作时,发射出波长为870 nm的激光,通过内置步进电机的精确旋转控制,实现每隔0.25°的旋转动作,即每个工作周期内产生1 080(270°/0.25°=1080)个距离数据信息,利用微处理器向传感器写入算法程序,滤除其中存在的地面、天空无关数据点信息。
传感器存在一个90°扫描盲区,若选择盲区朝上安装方式可以检测传感器下方以及两侧的目标,激光传感器正上方90°为盲区,实际喷雾检测过程中,传感器安装在喷雾机车中间部位,其下方扫描到的都是喷雾机车车体部位,为无用数据,有用的为两侧数据。而盲区朝下安装方式传感器正下方90°为盲区,容易看出激光传感器可以检测距离传感器垂直距离大于传感器安装高度的目标,这里滑台上安装高度为1.67 m,所以距离激光传感器垂直距离1.67 m以外的目标均可检测到,一般果树间距4-5 m,所以目标中心到激光传感器中心垂直距离一般2.0-2.5 m,所以盲区朝下安装方式也是能满足要求。本文选择将激光传感器盲区朝地设置,可实现以竖直向上方向为参考基准的左右各540点的两侧目标的扫描检测。当传感器处于静止状态时,检测得到物体与传感器之间的二维网格距离信息,当其处于运动状态时,便可给出三维的矩阵距离信息。一个扫描周期内,每相邻两扫描点之间的角度大小为0.25°,由于传感器高度是固定的,激光光波成散射的扫描方式,导致竖直方向检测点之间的间距是不同的,通过插值算法进行纠正,使竖直方向检测点连续规整并同时补偿由于水平方向的运动速度而带来的水平间隔。
1.2 滑台驱动电机及控制器
选用日本安川(Yaskawa Electric)公司生产的SGMSH-20A2A61型伺服电机,作为系统动态检测的驱动装置。其额定功率为2 000 W,额定转速3 000 r/min,利用发送脉冲实现对电机运动的控制,由于其自带的全闭环功能,便于实现高精度控制。电机驱动器采用配套的伺服电机驱动器,型号SGDM-20ADA。利用STM32F103VET6单片机编程实现对伺服电机运动的控制,进而精确控制滑台上滑块的往返运动,滑块的速度与位置均能得到精确控制。激光传感器通过连接机构安装在滑块上,滑块的往返运动带动激光传感器的来回运动,通过控制电机的转速,实现激光传感器在不同速度下对待检测目标的动态扫描检测。
1.3 试验平台搭建
在一个定制的80系列同步带滑台上,其中滑台尺寸为长6.4 m、宽8 cm,搭建由激光传感器、伺服电机、集成化的控制柜构成的基于激光传感器的靶标检测试验系统(图1)。其中集成化控制柜包括伺服电机驱动器、三相调压器、控制电路板、开关电源、触摸屏等部件。通过降压电源模块,实现锂电池输出电压14.8 V到12 V的转换,为激光传感器、触摸式微处理器供电。以STM32F103VET6单片机为核心的电机控制单元,通过RS485实现与控制柜的触摸屏单元的通信,通过触摸屏参数的设定,实现对电机速度、运行位置的控制。利用无线键盘实现触摸式微处理器上数据采集软件的打开与关闭,激光扫描数据通过USB串行总线传输到触摸式微处理器中,数据帧按照扫描的时间顺序排列,以TXT文档的方式保存在存储器中。滑台系统距地面的高度为1.67 m,为保证伺服电机运行的安全性,在滑台系统两端均设置限位开关,型号为沪工集团生产的 LJ18A3-8-Z/BX型限位开关。
本文主要通过滑台进行室内检测试验,目的验证二维激光传感器的检测性能以及三维重构效果,滑台很平稳,不至于受到地面颠簸的影响,从而排除外界测试条件对激光数据的影响,达到客观验证UTM-30LX激光传感器测量精度的目的。室外真实场景条件较为复杂,除了地面不平整度对激光传感器测量姿态角的影响外,还存在行进过程中偏航角的影响;考虑到诸多复杂条件的影响,验证激光传感器精确度的评价标准将变得十分困难。综上所述,本文采用室内滑台作为试验条件验证此激光传感器检测精度可以排除各种外界条件的干扰,为农业检测技术提供较好的试验参考依据。
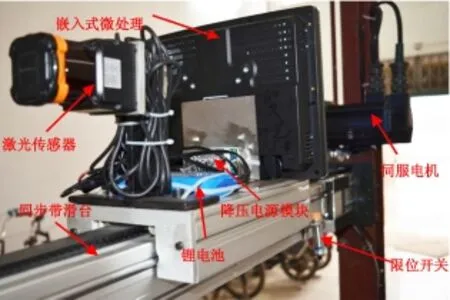
图1 滑台靶标检测试验系统Fig. 1 Targets test system based on the sliding table
1.4 试验方法
1.4.1 试验设计 室内实验对象为长方体柜子、圆柱体泡沫及2棵仿真树,实物图及其尺寸大小分别见图2和表1。长方体柜子的三维尺寸、圆柱体泡沫的高度和直径、2棵仿真树的高度和宽度的真实测量值记录在了表中,用来作为激光传感器检测的目标物体尺寸的对照。
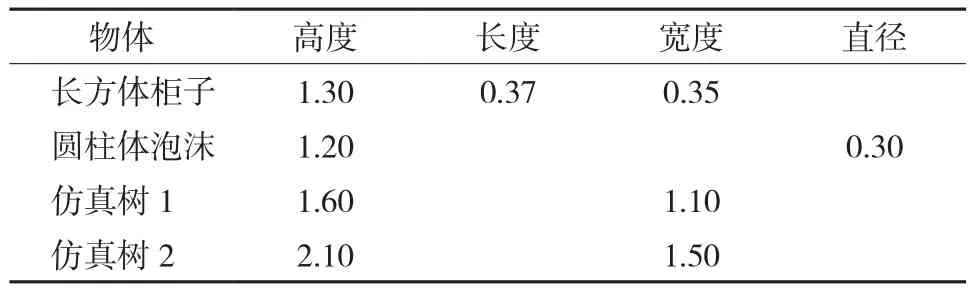
表1 各试验物体尺寸大小(m)Table 1 Sizes of the targets for detection
试验时,待检测物体中心位于与滑台系统中心平行的直线上,且它们之间的垂直间距分别为2.0 m、2.4 m和2.8 m,也即激光传感器到目标物体中心垂直间距分别为2.0 m、2.4 m和2.8 m。调节电机转速,使得传感器的移动速度分别为0.3 m/s、0.5 m/s、0.7 m/s和0.9 m/s。目标物体与同步带滑台的3种垂直间距和激光传感器的4种移动速度,进行组合试验。按照不同检测间距以及检测速度的组合分别对4种目标进行检测试验,将每一次的激光传感器的检测目标物体的试验数据存储在控制计算机中,便于后期数据处理。为减小误差,同一种条件下的试验重复进行5次,取其平均值作为检测结果。
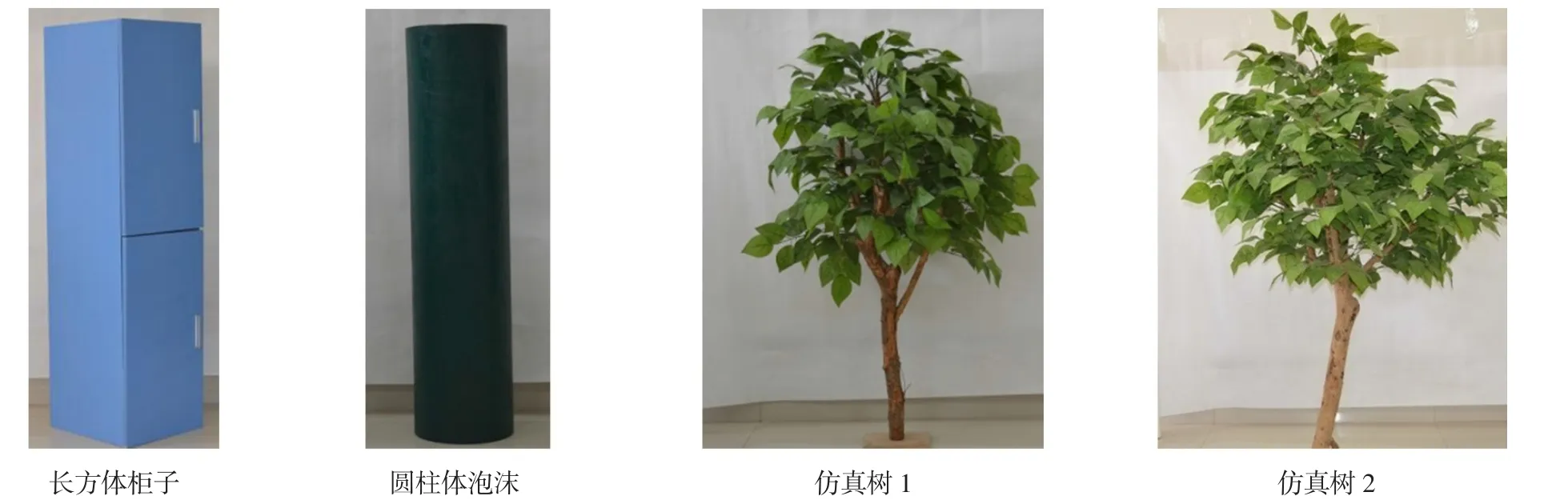
图2 试验检测物体实物图Fig. 2 The physical diagram of the targets
1.4.2 数据分析方法 激光传感器实时检测植株目标,获取切面轮廓的极坐标数据信息,利用自主编写的C++程序,实时读取该信息并存储于控制计算机中。利用MATLAB软件对存储的数据信息进行后期的离线分析,其程序流程见图3。

图3 数据处理流程图Fig. 3 Flow chart of data processing
首先,将采集到的距离矩阵信息由极坐标数据格式转化为直角坐标数据格式,进而进行滤波处理,滤除目标以外无用的天空、地面数据。考虑到激光传感器的动态检测,需对有效的距离信息矩阵进行缩放变换,通过MATLAB中的maketform()函数定义变换矩阵,进而调用imtransform()函数,实现仿射变换。在此基础上,利用interp2()函数对离散数据进行插值计算,重构轮廓曲面。应用colormap()函数,获取当前图像色图,即将图像中不同的距离信息表示为对应的色彩颜色,获取伪彩色图像,重构物体三维结构图,进而对上述4个试验物体的各个尺寸进行误差分析。
在定量比较传感器检测得到的目标对象尺寸与实际测量尺寸后,为了定量分析激光传感器扫描重构后的物体三维图像与物体实际图像的相关性,考虑到树木形状不规则问题,引入一种基于边界距离场的相似性评估方法[19-22],用来比对相同试验条件下激光传感器扫描重构的树木图像以及照相机拍摄到的树木图像的轮廓相似性。具体试验步骤如下:
1)同步带滑台上的激光传感器以一定的检测速度和检测距离先对目标检测扫描,保存检测数据。
2)保持目标的相对位置不发生变化,选取与激光检测距离相同的拍摄距离,相机高度与传感器等高,且相机位于目标宽度范围中心线上,拍摄时相机的中心焦点位于目标的几何中心位置,然后拍摄目标照片。
3)将照相机拍摄到的树木图像与重构的物体三维图像,通过形态学处理和边缘检测的方法,分离得出物体图像的轮廓。
4)通过边缘的相似性得分(Edge Similarity Score,简称ESS)参数值定量分析。
图像的轮廓处理部分,归一化为二进制信息,并设定图像的边缘点用1表示,其它空白的点用0表示。距离场被定义为一种包含多个点到轮廓几何表面的标量距离空间场信息。在边界距离场中,每个单元表示其到图像轮廓的最小距离。假设一个集合P={p1,p2,…,pm}代表图像的轮廓,标量距离函数D(q,pi)代表图像中的一点q与图像边缘点pi之间的最短距离点。q点到集合P={p1,p2,...,pm}的最小距离定义为D(q,P)=Min(dist(q,pi))。对于一个二维区域M,边界距离场DM(P),是由区域M内部所有点与边缘轮廓的最小距离Min(dist(q,pi))构成的一个标量场。两张图片的相似度最终由边缘的相似性得分(ESS)这个参数值来定量给出。ESS值是通过计算激光传感器扫描重构以及照相机拍摄得到的图像各自的边界距离场的绝对相关系数得到,具体计算公式为:
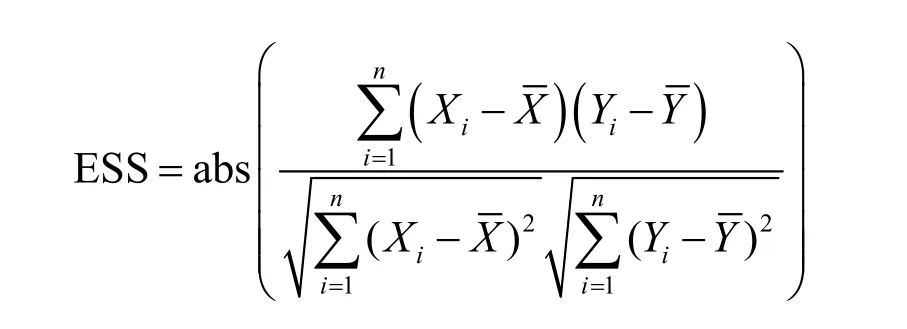
式中:X为激光传感器扫描重构的图像边缘轮廓的转化向量,Y为照相机拍摄到的图像边缘轮廓的转化向量,Xi、Yi分别为两幅图像边缘轮廓点的像素值,、为像素平均值。
EES的取值范围值是从0到1,其中0表示比对的两幅图像的轮廓没有任何相似之处,而1则表示比对的两幅图像轮廓完全一致。因此,EES值越接近1,则表示比对的两幅图像的相似性越高。
2 结果与分析
2.1 物体的三维图像重构
对获取的激光检测数据分析处理,重构出长方体柜子、圆柱体泡沫和2棵仿真树对应的激光三维重构效果图(图4),此时的检测距离为2.0 m,传感器移动速度为0.3 m/s,因篇幅限制,在此就不一一列举其他组合条件下的多次试验得到的目标树木的三维重构效果图。从图中可以看出,激光传感器重构的目标物体形态良好,重构算法效果较好,选用的二维激光扫描传感器对目标物体三维重构具有优良的性能。
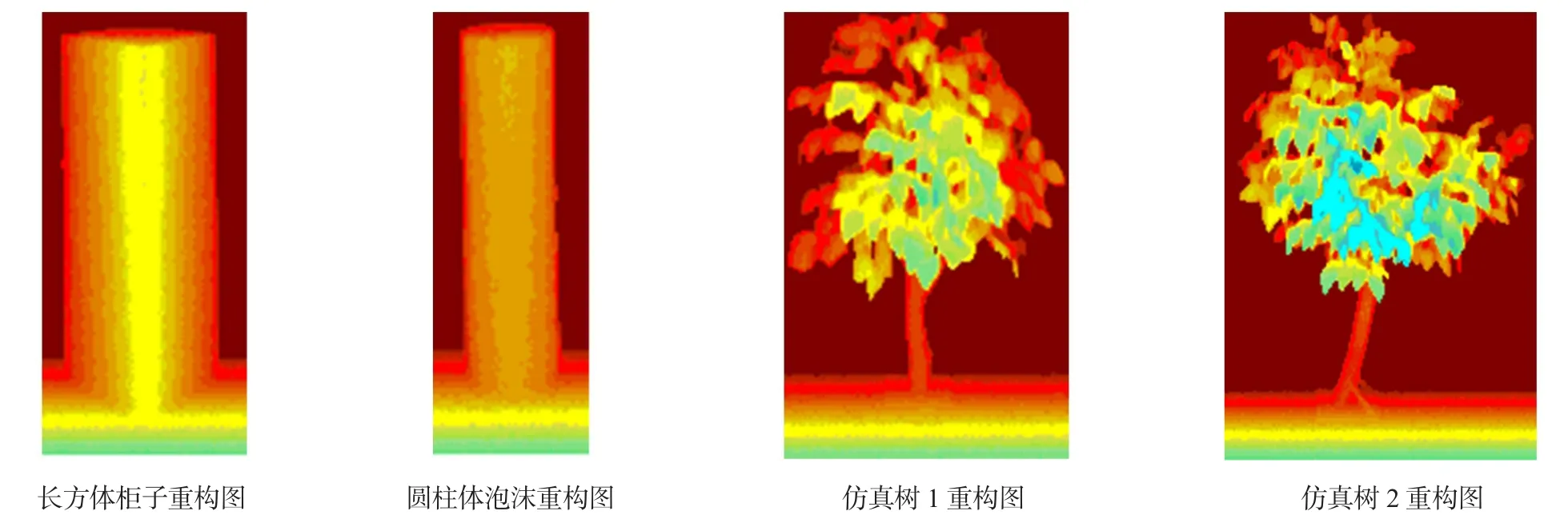
图4 激光传感器检测物体对应的目标重构图Fig. 4 Reconstruction images of objects detected by laser sensor
2.2 室内、室外树木尺寸测量分析
从视觉直观层面来看,激光传感器所检测植株实物图与其对应的目标三维重构图,两者间具有较好的一致性。在此基础上,为实现对靶标物体特征信息的定量分析,即将检测到的目标尺寸与实际测量值进行对比分析,提取激光扫描目标数据特征量(长度、宽度、高度、直径)与手动测量特征值相比较。
与人工测量值相比,激光传感器测得的长方体柜子的长度、宽度和高度的尺寸最大相对误差分别为6.76%、6.86%和3.92%(表2);激光传感器测得的圆柱体泡沫的高度、直径的尺寸最大相对误差分别为4.25%和7.33%;激光传感器测得的仿真树1高度、宽度的尺寸最大相对误差分别为4.06%和5.91%;激光传感器测得的仿真树2高度、宽度的尺寸最大相对误差分别为3.24%和4.00%。可见,在不同检测距离不同检测速度的组合下,各种物体的检测值相对误差均小于10%,且目标物体尺寸值越大,检测效果越好,相对误差值越小;再者,根据激光传感器参数可知,检测精度10 m以内为±30 mm,表中数据的绝对误差值大部分都在30 mm以内,只有极少数超过这个数值,同样说明了此款激光传感器的精度较高;最后,观察表中数据发现,对同一个物体检测,速度越快,检测精度越低,相对误差越大,这种趋势在目标尺寸较大时较明显,而对于柜子与圆柱体趋势则不明显,整体而言,由于选取的检测速度都不是很大,所以不同检测速度下检测结果应该差别不大,检测数据是波动的,但是受到系统误差,处理数据误差等影响,存在厘米级别的差距都是正常的。
综上可知,激光传感器探测数据基本能够高精度重构原始目标三维形状并且能够精确检测各类目标特征(高度、宽度),对不同的扫描距离和行进速度均无显著性差异。
2.3 图像边缘轮廓相似度评估
激光传感器在不同的检测距离以及检测速度下,获取实际树木植株图像和激光传感器检测得到的目标重构图像的轮廓(图5)并计算其相似度,其中相似度计算值为同一条件下多次实验结果的平均值。分析数据可知,2棵仿真树1、2的轮廓相似度最大值分别为0.969 2和0.958 4,轮廓相似度最小值分别为0.928 8和0.932 6(表3)。考虑到试验中ESS值受以下因素的影响:1)激光传感器在运动过程中存在振动;2)激光传感器安装角度不佳;3)利用算法实现目标物体三维重构时存在一定的误差,以及植株照片拍摄角度等其它因素。
尽管如此,计算得到的ESS值均大于0.92,出现如此高的相似度有以下三个原因:1)图片拍摄面与传感器检测面为同一个面,拍摄角度与传感器检测角度高度统一,减少人为误差;2)轮廓提取算法相同,避免因为算法问题影响相似度,最后求取相似度的算法也做到统一,且编程手法也相同;3)所选作用的二维激光传感器精度很高,性能优越。
分析结果表明,UTM-30LX型激光传感器在一定程度上,能对枝叶不规则的树形结构进行精确的测量,完全可以满足农业变量喷雾检测的精度要求。
3 结论
1)搭建了基于UTM-30LX型激光传感器的室内滑台靶标检测系统,实时扫描检测规则物体、仿真树,读取、存储其轮廓特征数据信息,利用
MATLAB软件进行后期的离线分析处理,验证该激光传感器的检测性能。
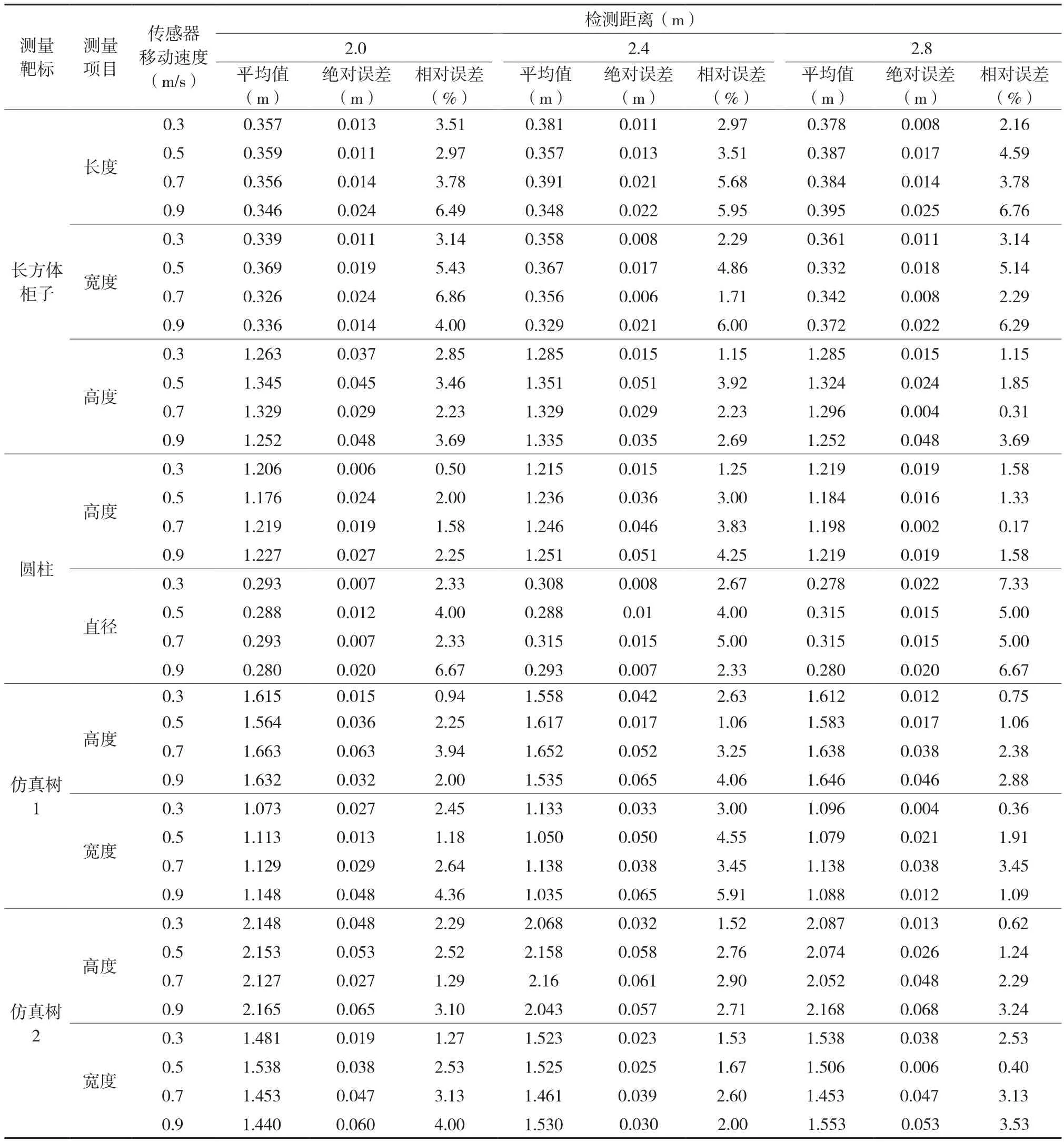
表2 激光传感器检测四种试验对象的尺寸误差分析Table 2 Experiment results and error analysis of four kinds of objects detected by laser sensor
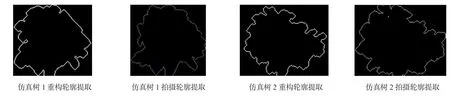
图5 目标三维重构与拍摄两种情况下的轮廓提取对比Fig. 5 Contrast of the outlines extracted by reconstruction images detected by laser sensor and photos of objects
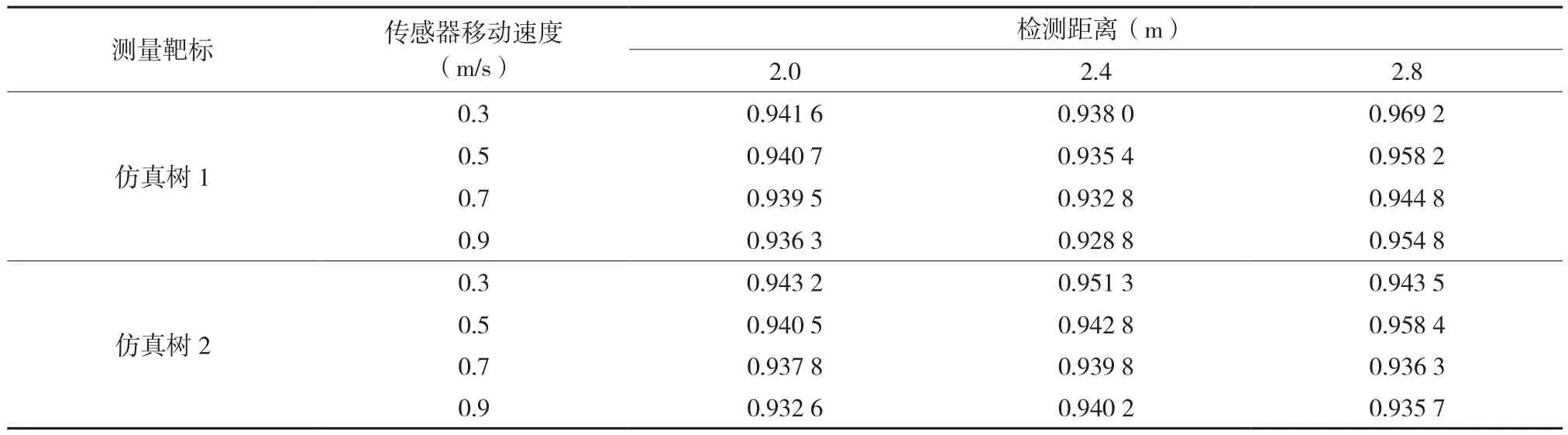
表3 仿真树照片与重构图像两者边缘轮廓的相似度(ESS)Table 3 Edge similarity score of reconstruction images detected by laser sensor and photos of artificial trees
2)多次试验条件下,与人工测量尺寸比较而言,激光传感器测得的长方体柜子、圆柱体泡沫、仿真树1和仿真树2的各项尺寸最大相对误差均在10%以内;仿真树1、2的激光扫描重构图像与对应实物轮廓相似度均在0.92以上。研究表明在不同试验条件下,激光传感器均能准确地识别目标大小、形状等特征信息,且均无显著性差异。
3)本文在滑台系统验证了所选用的二维激光传感器的优越性能,完全能满足农业变量喷雾的检测精度要求,关于室外复杂地形条件对于二维激光传感器检测喷雾靶标的影响以及矫正研究也在进行中,通过室内的性能测试试验结合室外对于复杂地形条件的适应性矫正试验等研究,二维激光传感器完全可以在农业领域精确地测量目标的特征信息,然后据此特征信息实现精密变量喷雾,具有良好的应用前景。
[1] 何雄奎. 改变我国植保机械和施药技术严重落后的现状[J]. 农业工程学报, 2004, 20(1): 13-15. He X K. Improving severe draggling actuality of plant protection machinery and its application techniques[J]. Transactions of the Chinese Society of Agricultural Engineering, 2004, 20(1): 13-15.
[2] 傅泽田, 祁力钧, 王俊红. 精准施药技术研究进展与对策[J].农业机械学报, 2007, 38(1): 189-192. Fu Z T, Qi L J, Wang J H. Developmental tendency and strategies of precision pesticide application techniques[J]. Transactions of the Chinese Society for Agricultural Machinery, 2007, 38(1): 189-192.
[3] Bennur P J, Taylor R K. Evaluating the response time of a rate controller used with a sensor-based application system[J]. Applied Engineering in Agriculture, 2010, 26(6): 1069-1075.
[4] 刘慧, 夏伟, 沈跃, 等. 基于实时传感器的精密变量喷雾发展概况[J]. 中国农机化学报, 2016, 37(3): 238-242. Liu H, Xia W, Shen Y, et al. Development overview of precision variable spraying based on real-time sensor technology[J]. Journal of Chinese Agricultural Mechanization, 2016, 37(3): 238-244, 260.
[5] Liu H, Zhu H, Shen Y, et al. Development of digital flow control system for multi-channel variable-rate sprayers[J]. Transactions of the American Society of Agricultural and Biological Engineers, 2014, 57(1): 273-281.
[6] Needham D L, Holtz A J, Giles D K. Actuator system for individual nozzle control of flow rate and spray droplet size[J]. Transactions of the American Society of Agricultural and Biological Engineers, 2012, 55(2): 379-386.
[7] 陈志刚, 王玉光, 孟婷, 等. 喷雾施药植株对靶红外试验[J].排灌机械, 2009, 27(4): 237-246. Chen Z G, Wang Y G, Meng T, et al. Experiment of infrared target detection for plants pesticide spraying[J]. Drainage and Irrigation Machinery, 2009, 27(4): 237-246.
[8] 邓巍, 何雄奎, 张录达, 等. 自动对靶喷雾靶标红外探测研究[J]. 光谱学与光谱分析, 2008, 28(10): 2285-2289. Deng W, He X K, Zhang L D, et al. Target Infrared Detection in Target Spray[J]. Spectroscopy and Spectral Analysis, 2008, 28(10): 2285-2289.
[9] Llorens J, Gil E, Llop J, et al. Variable rate dosing in precision viticulture: Use of electronic devices to improve application efficiency[J]. Crop Protection, 2010, 29(3): 239-248.
[10] 俞龙, 洪添胜, 赵祚喜, 等. 基于超声波的果树冠层三维重构与体积测量[J]. 农业工程学报, 2010, 26(11): 204-208. Yu L, Hong T S, Zhao Z X, et al. 3D-reconstruction and volume measurement of fruit tree canopy based on ultrasonic sensors[J]. Transactions of the Chinese Society of Agricultural Engineering, 2010, 26(11): 204-208.
[11] 翟长远, 赵春江, 王秀, 等. 树型喷洒靶标外形轮廓探测方法[J]. 农业工程学报, 2010, 26(12): 173-177. Zhai C Y, Zhao C J, Wang X, et al. Probing method of tree spray target profile[J]. Transactions of the Chinese Society of Agricultural Engineering, 2010, 26(12): 173-177.
[12] Stajnko D, Berk P, Lešnik M, et al. Programmable ultrasonic sensing system for targeted spraying in orchards[J]. Sensors, 2012, 12: 15500-15519.
[13] Hossein M, Saeid M, Barat G, et al. Ultrasonic sensing of pistachio canopy for low-volume precision spraying[J]. Computers and Electronics in Agriculture, 2015, 112: 149-160.
[14] 樊仲谋, 冯仲科, 郑君, 等. 基于立方体格网法的树冠体积计算与预估模型建立[J]. 农业机械学报, 2015, 46(3): 320-327. Fan Z M, Feng Z K, Zheng J, et al. An establishment of tree crown volume calculation and prediction model using cubic lattice method[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(3): 320-327.
[15] 韦雪花, 王永国, 郑君, 等. 基于三维激光扫描点云的树冠体积计算方法[J]. 农业机械学报, 2013, 44(7): 235-240. Wei X H, Wang Y G, Zheng J, et al. Tree crown volume calculation based on 3-D laser scanning point clouds data[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(7): 235-240.
[16] Richardson J J, Moskal L M, Kim S H. Modeling approaches to estimate effective leaf area index from aerial discrete return LIDAR[J]. Agricultural and Forest Meteorology, 2009, 149(6/7): 1152-1160.
[17] Danson F M, Hetherington D. Forest canopy gap fraction from terrestrial laser scanning[J]. IEEE Geoscience and Remote sensing Letters, 2007, 4(1): 157-160.
[18] Cote J F, Widlowski J L, Fournier R A, et al. The structural and radiative consistency of three-dimensional tree reconstructions from terrestrial lidar[J]. Remote Sensing of Environment, 2009, 113(5): 1067-1081.
[19] Mao Y, Wu M. Security evaluation for communication-friendly encryption of multimedia[R]. International Conference on Image Processing, 2004.
[20] Manocha D, Otaduy M, Sud A. Fast distance field computation using graphics hardware[R]. University of North Carolina, Computer Science Technical Report: TR03-026, 2003.
[21] 张见威, 韩国强, 沃焱. 基于边界距离场互信息的图像配准方法[J]. 通信学报, 2006, 27(7): 87-93. Zhang J W, Han G Q, Wo Y. Image registration method based on mutual information about distance field of image edges[J]. Journal on Communications, 2006, 27(7): 87-93.
[22] 张志佳, 黄莎白, 史泽林. 新的基于边缘特征的图像相关匹配方法[J]. 红外与激光工程, 2003, 32(6): 635-638. Zhang Z J, Huang S B, Shi Z L. New image correlation-matching algorithm based on edge extraction[J]. Infrared and Laser Engineering, 2003, 32(6): 635-638.
(责任编辑:童成立)
Application of laser scanning sensor for spray targets detection
SHEN Yue, XIA Wei, LIU Hui, LI Ning
(School of Electrical and Information Engineering, Jiangsu University, Zhenjiang, Jiangsu 212013, China)
It is a critical step to achieve characteristics of trees in various sizes and shapes for modernizing agriculture applications. Target detection could provide technical data for variable-rate precision spraying of agriculture and forestry management. In order to measure the spray targets accurately, an indoor target detection sliding table platform with UTM-30LX laser sensor was built to detect regular-shape objects and artifcial trees. A C++ language-based algorithm was developed to scan and save laser object data in real time, and an image reconstruction algorithm designed with MATLAB software was used to reconstruct laser object data slices to 3-D canopy images and measure tree sizes. The measurement accuracy of the 3-dimentioal reconstruction images of the spray targets were analyzed by the maximum relative error and edge similarity score. The system accuracy was tested with scanning objects of one rectangular cabinet, one foam cylinder and two artifcial trees under indoor laboratory conditions for scanning distances of 2.0 to 2.8 m and sensor travel speeds of 0.3 to 0.9 m/s. Results show that the maximum relative errors about length, width and height of the rectangular cabinet are 6.76%, 6.86% and 3.92% compared with manual measurements in multiple measurements, the maximum relative errors about height and diameter of the foam cylinder are 4.25% and 7.33%, the maximum relative errors about height and width of two artifcial trees are 4.06%, 5.91% and 3.24%, 4.00% respectively; The minimum edge similarity scores of the two artificial trees are 0.928 8 and 0.932 6 respectively by several experiments. Results verify the accuracy and precision of UTM-30LX laser sensor on several environments and prove that UTM-30LX laser sensor can be applied in the area of variable-rate precision spraying for the detection of targets..
modernizing agriculture; variable-rate precision spraying; laser scanning sensor; spray targets detection system; 3-D reconstruction image
SHEN Yue, E-mail: shen@ujs.edu.cn.
S491
A
1000-0275(2017)02-0335-08
10.13872/j.1000-0275.2016.0124
沈跃, 夏伟, 刘慧, 李宁. 激光传感器在喷雾靶标检测中的研究应用[J]. 农业现代化研究, 2017, 38(2): 335-342.
Shen Y, Xia W, Liu H, Li N. Application of laser scanning sensor for spray targets detection[J]. Research of Agricultural Modernization, 2017, 38(2): 335-342.
国家自然科学基金项目(51505195);江苏省自然科学基金项目(BK20130501);江苏省高校自然科学基金(13KJB210002)。作者简介:沈跃(1978-),男,江苏宿迁人,博士,副教授,博士生导师,主要从事农业电气化与自动化、嵌入式系统与控制等研究,E-mail: shen@ujs.edu.cn。
2016-07-18,接受日期:2016-10-22
Foundation item: National Natural Science Foundation of China (51505195); Natural Science Foundation of Jiangsu Province (BK20130501); Natural Science Foundation for Colleges and Universities of Jiangsu Province (13KJB210002).
Received 18 July, 2016; Accepted 22 October, 2016
猜你喜欢
课堂内外·小学版(低年级)(2023年6期)2023-04-29 00:44:03
青少年科技博览(中学版)(2022年11期)2023-01-07 06:21:34
好日子(2021年8期)2021-11-04 09:02:46
故事作文·高年级(2021年5期)2021-06-01 06:50:22
军民两用技术与产品(2021年10期)2021-03-16 06:05:10
制造技术与机床(2019年11期)2019-12-04 05:50:54
世界农药(2019年3期)2019-09-10 07:04:10
光学精密工程(2016年4期)2016-11-07 09:04:48
肿瘤影像学(2015年3期)2015-12-09 02:38:45
计算机工程(2015年4期)2015-07-05 08:27:39