利用多传感器集成和数据融合实现水上水下一体化测绘
2017-04-10 01:23陈科,王冲,闻平,吴杰,桂林
测绘通报 2017年3期
陈 科,王 冲,闻 平,吴 杰,桂 林
(中国电建集团昆明勘测设计研究院有限公司测绘地理信息分院,云南 昆明 650041)
利用多传感器集成和数据融合实现水上水下一体化测绘
陈 科,王 冲,闻 平,吴 杰,桂 林
(中国电建集团昆明勘测设计研究院有限公司测绘地理信息分院,云南 昆明 650041)
水上水下一体化测绘技术为水域相关测绘提供了一种高效快速的解决方案。本文介绍了多传感器集成和数据融合领域的研究背景,阐述了水上水下一体化测绘的原理和方法,结合工程试验数据,对点云数据进行了精度统计分析,论证了水上水下一体化测绘技术方法在水电工程应用中的有效性,水上水下一体化测绘是对传统水域相关测绘技术方法的变革和创新,具有一定的工程意义。
水上水下一体化;多传感器集成;数据融合;船载;移动测量
随着测绘“大数据”时代的到来,移动互联网、物联网、云计算、对地观测、北斗导航系统、小型遥感卫星、无人机遥感、倾斜摄影、移动测量、自动驾驶、室内导航、智能感知等新手段和各种基于位置应用技术的不断进步和完善[1- 2],使得“天空地人”一体化测绘解决方案逐渐应用到各行各业并日益成熟。相对于“天空地人”一体化测绘而言,水域相关测绘方面比较薄弱,特别在水资源丰富的中西部地区,在高山峡谷河道测绘方面,技术依然传统,效率不高,难以满足“大数据”时代的数据要求和用户需求。因此,针对河道地形测绘、河流冲刷淤积管理、水库动态监测、流域智能决策系统等工程应用,亟待探索一种水上水下一体化的高效测绘技术方法[3]。
传统上,涉及水域相关的三维地理信息数据采集,一般分为水上和水下两个独立的工程分别实施[4]。水上工程区域多采用GNSS RTK人工跑点、航空/天摄影测量技术、无人机遥感技术等;而水下工程一般借助测量船结合测深仪、侧扫声呐、多波束测深系统采集水深数据。这种将水上水下同一工程一分为二的实施方法,往往存在:水上水下坐标基准不统一;水上水下数据精度不一致;两岸悬崖陡坡人员无法到达导致数据不完整;水上水下数据不连续,存在数据空白需进行插值等后处理工作;作业效率不高等技术瓶颈[5]。因此,研究一种水上水下一体化测绘技术方法,对提高近海海岸带测绘和河道带状测绘的效率、精度、数据质量等具有重要意义。
以三维激光扫描技术为核心的移动测量系统(mobile mapping system,MMS)是测绘最为前沿的科技之一,代表着未来电子地图制图领域的发展方向[6]。李德仁院士主持的技术团队对该领域作了大量研究和科技创新[7],提出了全新的可量测实景影像(digital measurable image,DMI)的概念,并写入国家测绘标准,成为第5D测绘产品[8]。同时,多波束测深技术的发展,打破了传统单波束以点为基础的离散式的作业模式,而代之以空间面为基础的立体式作业模式,实现了立体测图、智能处理及自动化成图,使海洋测量技术发展到一个较高的水平[9]。此外,随着GNSS技术的发展和惯性测量单元(inertial measurement unit,IMU)性能的大幅提高,利用IMU测姿组合GNSS载波相位差分定位而形成的定位定姿系统(position and orientation system,POS),可直接为移动平台和传感器提供高精度空间位置和三轴姿态信息,实现直接地理定位,为无(极少)控制点测绘提供了一种快速、有效、可靠的解决途径,使得多传感器集成平台的应用成为可能[10]。在此背景下,本文采用测量船作为多传感器集成平台,结合笔者所在单位自身软硬件条件,将水上水下一体化测绘系统运用于河道带状测量工程中,系统阐述了多传感器集成原理和数据融合方法,结合试验数据分析点云数据的精度,验证其在大比例尺地形图测绘中的有效性。
1 水上水下一体化测绘原理和方法
1.1 多传感器集成原理
高精度的水下测深技术、地面三维激光技术、数字传感器技术、动态定位定姿技术、近景摄影测量等技术的不断发展和完善,使得基于各种载体的移动测量技术成为可能。水上水下一体化测绘技术主要集成了三维扫描仪、360°全景相机、多波束测深仪、GNSS- IMU定位定姿等设备,采用非接触主动式的数据采集方式同步获取水上水下地形特征点和水上全景影像[11- 12]。多传感器集成原理是:首先将水上水下所有传感器通过船载刚性稳定平台固联;量取各个传感器在水上水下一体化系统物方坐标系下的坐标值;将量取的杆臂值输入实时采集软件中进行水上水下数据采集;数据后处理中将GNSS- IMU定位定姿解算后数据导入系统,将水上水下全数据转换到统一的当地工程坐标系,实现水上水下一体化测绘。
水上水下一体化测绘系统主要包含以下子系统:
(1) 三维激光扫描子系统:采集水上地形数据,提供两岸高精度的三维点云数据。
(2) 多波束测深子系统:采集水下地形数据,提供水下高精度的三维点云数据。
(3) 全景影像采集子系统:采集360°全景影像。
(4) 动态定位定姿子系统:提供激光束发射和影像曝光瞬时的位置和姿态,解算点云的三维坐标和影像的外方位元素,实现全系统的时空一致和坐标统一。
(5) 数据实时采集子系统:通过电脑连接各传感器,在采集可视化软件中,按预定的航线进行作业,并实时监控水上水下数据采集情况。
(6) 数据后处理和应用发布子系统:主要由POS数据融合处理模块、点云数据处理模块、全景影像拼接和处理模块、地形特征地类地物处理模块、三维集成数据发布模块等组成。
1.2 数据融合原理
传统的水域测绘数据融合,一般指将具有数据空白或漏洞的水下数据和水上数据通过插值计算进行数据融合,实现水上水下无缝的、连续的、完整的地形数据。文献[13]描述的数据融合是指水下多传感器数据融合计算水下点云数据的三维坐标,以及水上多传感器的数据融合计算水上点云数据的三维坐标和全景影像的内外方位元素。
(1) GNSS和IMU数据融合计算定位定姿POS数据。POS数据解算主要完成将基站数据及GNSS数据和IMU数据融合,使用第三方Inertial Explorer软件实现。
(2) 水下数据融合。原始水深数据经过声速剖面改正后,将波束角和声速传播时间的数据转换成相对于测量船的水平位置和相对安装深度的水深值。数据融合是根据POS数据和潮位改正数据,将每个水深点的坐标从船体物方坐标系转换到地方工程坐标系中的三维坐标。
(3) 水上数据融合。主要是将POS数据和激光点云数据及全景影像数据进行融合处理,包括点云数据的时空归算改正、全景影像拼接、三维点云和全景影像的配准等,实现地物地类提取和河道街景数据发布。
2 试验分析
2.1 工程试验
水上水下一体化测绘系统集成了中海达iScan三维扫描仪和美国R2Sonic2022多波束测深仪及POS系统。试验区选取了500 m左右的大坝水库河道,系统集成平台采用了测量船上安装的自制刚性结构。外业操作主要分为:多传感器连接、航线布置、基准点建立、参数设置、设备初始化、水上水下数据采集等过程。数据处理主要包括:POS数据解算、水深数据融合、点云数据剔除、地类地物提取、地形要素生成等步骤。如图1所示。
2.2 精度分析
为了更好地分析水上水下一体化测绘的精度,检核点选择了河道两岸码头水泥台阶拐角、枯树桩、电线杆、独立石头等明显的地类地物点,首先在水上水下一体化测绘系统中提取相应特征点的坐标,然后采用传统的GNSS RTK实测的方法,对同名点特征地类地物的坐标进行了采集,将地类地物同名点的两套坐标进行精度统计分析。水上水下一体化测绘和GNSS RTK实测都采用了同一个岸上基准点,采用同一台GNSS接收机,并在同一天内完成。坐标系统都采用了WGS- 84基准和高斯3°带投影,高程系统为WGS- 84椭球高。
共采集了50个特征点,其中3个点为粗差点已剔除,故本次试验的总体数据为47个特征点,并随机抽取了其中12个点作为样本点,表1为样本特征点的坐标差值对比。
对样本点坐标分量的精度统计分析见表2。从表2可以看出坐标各分量的误差都是随机误差且符合正态分布的特性。从图2误差分布图中可以看出,平面和高程的最大偏差都小于25 cm,其中东坐标最大偏差达19.5 cm,北坐标偏差最大达22.7 cm,高程最大偏差达22.3 cm。平面和高程的点位中误差分别为18.9和14.6 cm,根据《水利水电工程测量规范》中地形点的图上精度为0.5~0.6 mm,水上水下一体化测绘实测精度满足水利水电工程大比例尺地形图的测图精度要求。
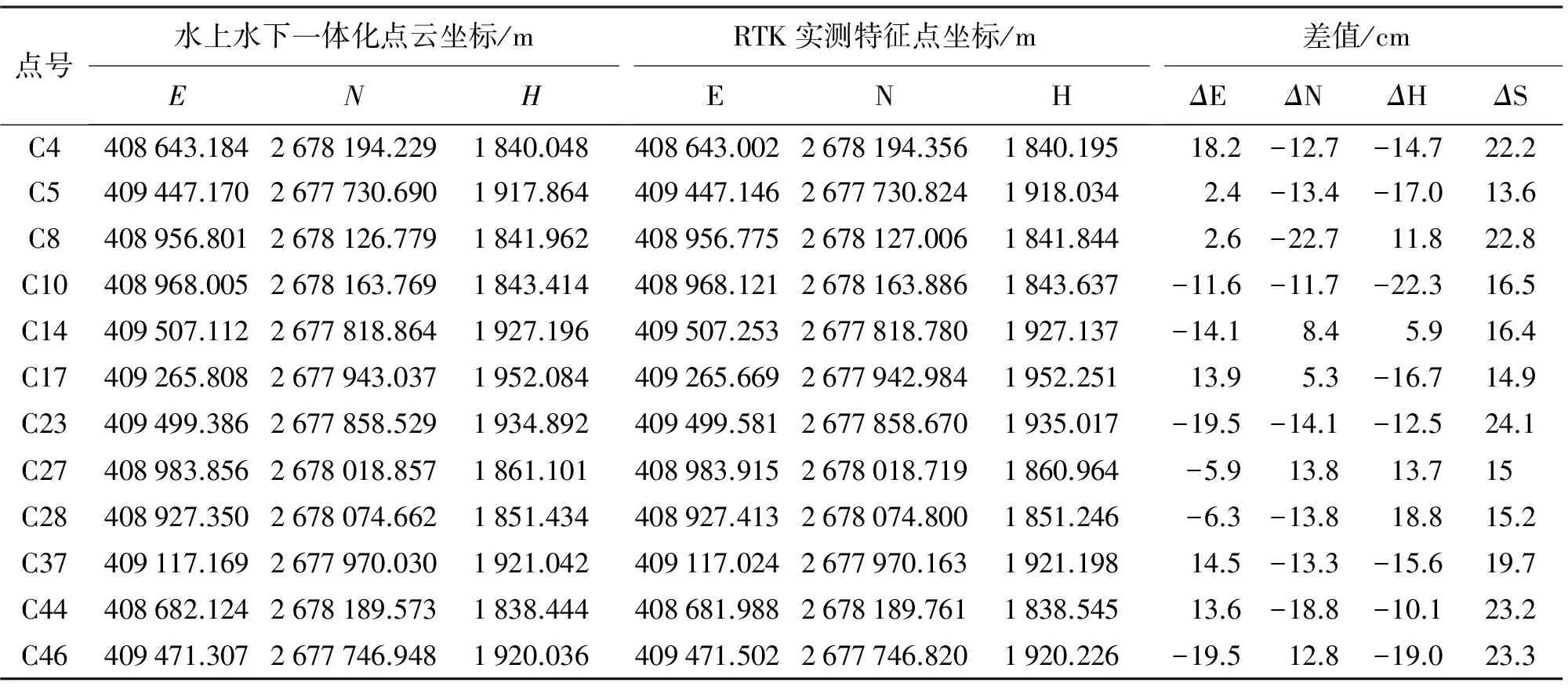
表1 水上水下一体化点云坐标与RTK实测特征点坐标精度对比
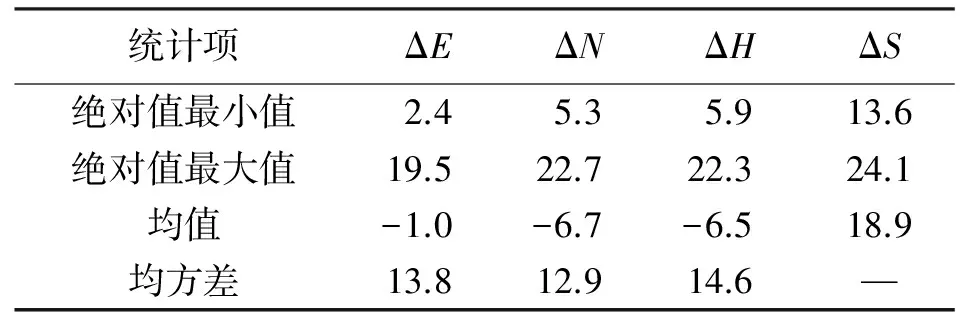
表2 样本数据精度统计分析
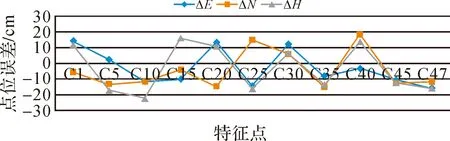
图2 特征点坐标分量误差分布
3 进一步研究
本文采用的水上水下多传感器集成方法,系统集成程度较低,导致外业各软硬件串联难度大,内业数据处理工作步骤繁多复杂,容易出错。试验数据剔除了外业GNSS信号失锁和设备初始化阶段的数据,并采用WGS- 84坐标系统下,当天同一GNSS基站作为外业检核的基准,最大限度地保证了精度分析的有效性。考虑到水上水下一体化集成系统的复杂性,本文仅概要阐述了其系统集成原理和数据融合方法,并未从外业数据采集到内业数据处理及DMI数据发布进行系统性的论述,对于河道街景的发布等后续应用,考虑到工程的实际应用,在此并未展开讨论。在系统集成化程度、实时数据采集软件、点云自动化提取、地类地物智能化识别、POS系统误差纠正和补偿、点云和影像的自动化匹配等方面,还需要大量的研究,以不断提高水上水下一体化测绘的精度和效率。
4 结 语
海岸带及内陆河道水库测绘对于国家经济建设至关重要。移动测量技术已广泛应用于三维数字城市、带状地形图测绘、公路铁路等专题测绘、城市多要素普查、河道海岸带测绘等领域[14]。本文以测量船为载体,集成了水上水下多传感器设备,实现了河道带状地形图的一体化移动测量,提供了一种高效快速的河道带状三维地理信息要素的采集、处理、发布等工作的新途径,克服了传统测绘方法的技术瓶颈,极大地提高了工作效率,给传统河道测绘带来了全新的技术创新和变革。水上水下一体化测绘的精度能满足水利水电工程中对大比例尺地形图测绘的要求,是后续“数字河道”、“智能水库”等决策信息系统的基础,是对“天空地海人”全方位解决方案的有效补充,具有一定的工程意义。
[1] 库热西·买合苏提. 全国测绘地理信息工作会议报告[EB/OL].(2016- 01- 11)[2016- 02- 08].http:∥www.sbsm.gov.cn/article/ chyw/201601/20160100038027.shtml.
[2] 李德仁.论空天地一体化对地观测网络[J].地球信息科学学报,2012,14(4):419- 425.
[3] 黄文骞.海岛礁测绘的主要技术及方法[J].测绘通报,2014(5):123- 126.
[4] 余建伟,刘守军.中海达船载水上水下一体化三维移动测量系统[J].测绘通报,2013(7):119- 120.
[5] 张则飞,蒋婵娟.水上水下一体化测量设备应用分析[J].山西建筑,2015,41(25):210- 211.
[6] 李德仁.移动测量技术及其应用[J].地理空间信息,2006,4(4):1- 5.
[7] 李德仁.论可量测实景影像的概念与应用——从4D产品到5D产品[J].测绘科学,2007,32(4):5- 7.
[8] 李德仁,郭晟,胡庆武.基于3S 集成技术的LD2000系列移动道路测量系统及其应用[J].测绘学报,2008,37(3):272- 276.
[9] 陈宝枝,陈科,李正品,等.多波束测深系统在水库测量中的应用[J].地理空间信息,2013, 11(4):145- 147.
[10] 申家双,闸旋,滕惠忠,等.海岸带地形快速移动测量技术[J].海洋测绘,2015,35(2):13- 18.
[11] 宿殿鹏,阳凡林,石波,等.船载多传感器综合测量系统点云实时显示技术[J].海洋测绘,2015,35(6):29- 32.
[12] 孙辉,赵峰,张峰云.多传感器信息融合技术及其应用[J].海洋测绘,2009,29(5):77- 81.
[13] ALHO P,KUKKO A,HYYPP H,et al. Application of Boat Based Laser Scanning for River Survey[J]. Earth Surface Processes and Landforms, 2009, 34(13): 1831- 1838.
[14] 汪连贺.三维激光移动测量系统在海岛礁测量中的应用[J].海洋测绘,2015,35(5):79- 82.
Realization of Mapping System Integrated Both Up- water and Under- waterwith Multi- sensor Integration and Data Fusion
CHEN Ke,WANG Chong,WEN Ping,WU Jie,GUI Lin
(Power China Kunming Engineering Corporation Ltd, Kunming 650041, China)
The mapping system integrated both up- water and under- water provides an efficient and rapid solution for water- related survey works. The study background on multi- sensor integration and data fusion was presented firstly. The primary theory and methodology of mapping system integrated both up- water and under- water was stated detailedly. Based on project test data, the accuracy statistics and analysis on point cloud data were worked out precisely. It was demonstrated that the proposed integrated mapping system would be an efficient solution and could satisfy the specification requirement of water conservancy and hydropower engineering project applications.
integrated survey system; multi- sensor integration; multi- data fusion; shipborne; mobile mapping
2016- 06- 07;
2016- 09- 08 作者简介: 陈 科(1984—),男,硕士,工程师,注册测绘师,主要从事点云数据处理和3S集成应用研究。E- mail:chenkecke@163.com
陈科,王冲,闻平,等.利用多传感器集成和数据融合实现水上水下一体化测绘[J].测绘通报,2017(3):76- 79.
10.13474/j.cnki.11- 2246.2017.0088.
P23
A
0494- 0911(2017)03- 0076- 04
猜你喜欢
建材发展导向(2021年22期)2022-01-18
一重技术(2021年5期)2022-01-18
纺织科学研究(2021年1期)2021-12-03
电子制作(2019年22期)2020-01-14
中学生数理化·八年级物理人教版(2019年9期)2019-11-25
传媒评论(2019年5期)2019-08-30
建材发展导向(2019年10期)2019-08-24
中学生数理化·八年级物理人教版(2019年12期)2019-05-21
时代英语·高一(2019年1期)2019-03-13
电子制作(2018年11期)2018-08-04