
运动模糊图像复原技术研究
2017-04-10 02:44张玉叶李明珠王春歆李开端
中国设备工程 2017年6期
张玉叶,李明珠,王春歆,李开端
(1.海军航空工程学院青岛校区,山东 青岛 266041;2.北海舰队,山东 青岛 266001)
运动模糊图像复原技术研究
张玉叶1,李明珠1,王春歆2,李开端1
(1.海军航空工程学院青岛校区,山东 青岛 266041;2.北海舰队,山东 青岛 266001)
分析运动模糊图像复原研究现状,说明该研究目前的三个方面的应用局限性,然后针对这些局限介绍目前研究的方向及常见技术。为了突破单一图像进行运动模糊复原的局限性,解决点扩散函数(PSF)难以估计以及图像反卷积的病态性问题,介绍一种联合图像复原的方法。
运动模糊;图像复原;点扩散函数;反卷积
运动模糊图像是由于摄像机与运动物体在曝光时间内有相对运动而产生的模糊,图像中每一点灰度是在运动参数所确定的距离当中,各景物点灰度的线性迭加。运动模糊图像恢复恢复讨论的是对运动物体拍摄的模糊图像进行精确的恢复。图像运动模糊复原在军事和工业控制有重要的应用需求,所以发展了很多的恢复方法,诸如差分恢复、维纳滤波、空间自适应复原方法等。这些方法各有特点,一定程度上解决了运动模糊图像的判读问题,但是在应用上有一定的限制。
(1)运动模糊图像的退化过程本身,及反卷积复原过程存在真实目标信息的丢失。
(2)模糊图像复原问题的研究一直以来基于空间移不变的假设,围绕着反卷积理论及技术使用各种图像复原算法进行恢复处理,而实际上,图像在获取过程中受拍摄条件及光学成像系统影响,降质函数容易随空间变化而变化。
(3)运动模糊复原方法,始终围绕着建立反卷积数学模型找回或者拟合逼近这些丢失信息进行。但是因为反卷积的病态性,复原过程容易受 PSF 估计误差及噪声影响,引入虚假信息,所以该问题的研究遇到瓶颈。
下面分别针对以上三个主要限制进行分析,并介绍目前研究的突破方向及成果。
1 运动模糊图像信息丢失原因分析
(1)由物理成像条件造成信息损失。首先从像素运动角度说明图像的模糊过程,设运动模糊长度为L,运动模糊方向为θ。相机与目标存在相对运动时,目标图像每个像素的运动性质是相同的,每个像素的灰度值是由其运动方向上的前L个像素灰度值的加权叠加。因为像素在途经每个位置时的曝光时间相等,所以其加权值为 L/1 。设 5=L , °=0θ ,示意图如图1。

图1 运动模糊图像的模糊机理示意图
图1中,矩阵 f表示目标的真实图像,矩阵 g表示运动模糊图像。该图表示真实图像的像素 ),(jif
经过了水平向右模糊5个像素得到了模糊图像的像素 ),(jig ,表达式如下:

由上式可知,模糊图像的每个像素是原始图像中相邻像素的平均结果,所以在复原模糊图像时,每个像素都得需要其相邻像素的信息才能得以复原。所以图像的空间限制造成的边界非零信息丢失会影响图像不能完全复原。边界非零信息的丢失程度取决于运动模糊长度L,L越大,丢失的信息越多,复原效果越差。
(2)由复原过程产生的复原效应。无论是代数复原方法还是频域复原方法,在处理图像时不可避免地引入各种误差或者低通滤波效应,尤其当运动模糊长度不是整数,或者模糊方向不是水平或垂直时,由于单像素的不可分性,势必引入更多的误差。
2 空间移变运动模糊的复原方法
对空间移变降质,出现了一些有针对性的方法,如针对场曲等高斯型模糊的多项式拟合方法、针对旋转运动模糊的复原方法、坐标变换法、矩阵分解法、卡尔曼滤波复原图像分块法等方法。这些方法的思想或者将降质函数转化为随空间变化的形式,或者将图像转化为局部空间移不变降质,对于其相应的特定情况处理是有效的,但是目前还没有合适的方法来解决一些常见的运动拍摄条件出现的空间移变的运动模糊。
3 引入计算摄影技术解决反卷积的病态问题
运动模糊反卷积复原的病态性一直是图像处理领域中公认的难题,也极大地限制了复原问题研究的进展。近年来研究者们将计算摄影技术引入到运动模糊复原领域,开拓了一种全新的思路。
基于计算摄影技术的图像复原是通过设计新的图像获取方式,来获得更利于图像复原的信息。2004 年,Ben-Ezra 等 人 首次 提 出借 助 高 速视 频传感器来辅助估计运动模糊 PSF,发展了一类基于视觉测量技术的方法,该类方法对成像设备的配置及组合要求较高。到 2006 年,Raskar等人提出在相机曝光时间内快速开—关快门的编码曝光(CodedExposureCE),可以获取可逆的运动模糊点扩散函数(PSF),也就是PSF在频域无零点存在,从而将病态性的复原问题转化为良态。CE方法获取可逆 PSF 的思想引起了研究者广泛的关注,也得到了进一步的发展。但是 CE方法需要复杂的快门控制设置,对于局部图像复原的前提假设是均匀背景,并且需要手动进行 PSF 估计和目标分割。2009 年,Agrawal等人利用普通相机通过连续拍摄,并改变曝光时间来记录同一目标,得到多个具有不同 PSF 的运动模糊目标图像,从而引入零填充的概念来构建可逆的 PSF,进行多图像联合复原。该方法成像设备要求简单,克服了前面方法中复杂的硬件设计问题。但是该方法需要在连续拍摄运动目标的过程中,不断变换曝光时间。对于高速运动目标,相邻帧中目标图像形态变化会比较大。另外,不同曝光时间获取的图像亮度也不同,那么利用多幅 PSF 不同的同一目标图像进行复原时,容易产生较大误差。
下面借鉴 Agrawal提出的联合多个 PSF 构建可逆的 PSF 的思想,介绍一种多图像联合模糊复原方法,利用设备参数相同的多个视频获取装置,来获取在同一背景下,亮度相同、但运动模糊程度不同的目标影像,进而对空间域迭代复原算式进行联立求解。
4 一种多图像联合模糊复原方法
4.1 设置不同快门的视频记录设备组合
采用固定对同一视场进行拍摄的多台视频设备来捕捉运动目标。这些视频设备型号相同,多台设备靠紧固定,在拍摄距离较远的条件下,不同设备拍摄的同一目标位置影像差别极微小。这样,当运动目标经过指定视场时,视频设备可以得到同一静止背景下不同运动模糊程度的运动目标影像。
设置相同的帧频,不同的曝光时间iT(快门),相应地调整光圈系数iF,来保证不同设备获取的照片具有相同的曝光量H。这里 H = Ti·Ei,其中 Ei指Fi对应的光照度。注意:同可变曝光连续图像获取方式相同,目标影像在背景中的位置也是有差别的,因为视频设备帧频相同,但是所设的曝光时间不同,所以快门开启的时间不同,记录的目标起始位置有一定的位移。图2显示的是两台视频设备采用不同快门和光圈组合拍摄同一运动目标得到的观测图像2(b)和 2(c)及其对应的背景图像 2(a)。
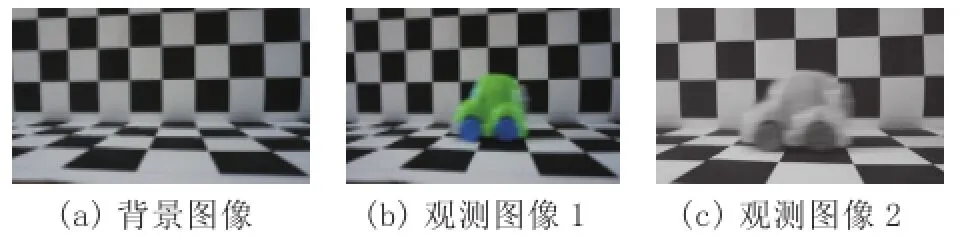
图2 采用不同曝光时间获取的运动目标图像
4.2 运动模糊目标图像 PSF 估计及分割提取
(1)运动模糊 PSF 估计。不同曝光时间获取的图像,运动模糊程度也不同,需要分别估计出每幅图像的运动模糊 PSF。传统的仅对单幅模糊图像进行的 PSF 估计准确度是比较低的,多幅图像共同复原的方法更利于准确估计 PSF。用本方法获取的每幅包含目标的图像,其获取时间由相机系统时间设置可以直接得到,然后根据两幅图像目标在背景中位置的差异,容易计算得到目标图像的运动速度v(单位:像素 /秒),v与曝光时间的乘积就是目标图像的运动模糊长度d(单位:像素),也就得到了第k幅图像中的运动模糊点扩散函数kh。
(2)运动模糊目标图像的分割提取。对于静止背景中运动目标的复原,首要的一点就是对完整目标图像的分割提取。本方法根据运动模糊叠加特征进行目标图像的分割提取,得到第k幅运动目标模糊图像kg。
4.3 多幅图像联合复原求解
得到kh和kg,就可以利用空间域方法进行联合复原。
单幅图像的空间域复原求解算式如下:

这里, f、kn分别表示复原结果图像和模糊图像中的加性噪声。kB是kh的循环运动模糊矩阵。式(2)转化为线性方程:

其中 A= BTB& b = BTg,利用共轭梯度算法在
kkk
空域求解。
对k幅图像联合求解,则:

相应地,式(3)转化为求解如下系统:
TP391.41
A
1671-0711(2017)03(下)-0182-03
猜你喜欢
农业工程学报(2022年14期)2022-10-19
疯狂英语·新悦读(2022年8期)2022-09-20
小哥白尼(军事科学)(2022年2期)2022-05-25
陶瓷学报(2020年6期)2021-01-26
紫禁城(2020年8期)2020-09-09
红领巾·萌芽(2019年8期)2019-08-27
数码世界(2017年12期)2017-12-28
计算机应用(2016年12期)2017-01-13
CHIP新电脑(2016年3期)2016-03-10
航天返回与遥感(2014年4期)2014-07-31
