
混响空时数据模型的建立与分析
2017-04-10 02:44:34赵申东谢力波李瑞红
中国设备工程 2017年6期
赵申东,谢力波,李瑞红
(海军航空工程学院青岛校区,山东 青岛 266041)
混响空时数据模型的建立与分析
赵申东,谢力波,李瑞红
(海军航空工程学院青岛校区,山东 青岛 266041)
本文介绍了声纳空时自适应处理 (STAP)的特点,能够充分利用运动声纳混响空时分布的特性,获得比常规方法更好的检测性能,是一种有前途的进行混响抑制的新方法。并分析了声纳和雷达工作环境及工作方式的异同,进而给出了混响空时数据的模型及组织方式,为STAP 抗混响的实现提供了依据。
混响;空时自适应处理;数据模型
STAP 算法是在雷达信号处理中发展起来的,而且多用于 AEW 雷达地物杂波的抑制。世界各国争相发展的新型 AEW 雷达均采用了脉冲多普勒(PD)体制,该雷达同时具有高距离分辨率和高多普勒分辨率的优点,因而受到了越来越多的重视。声纳和雷达的信号处理系统之间有着许多相似之处,但是,由于它们各自信号的传播存在着显著的差异,因此导致它们的信号处理方法亦有着明显的差别。
1 声纳与雷达工作方式的异同
声纳与PD雷达工作在不同的环境下,声纳的工作环境要比雷达的工作环境复杂得多。当速度是z的线性函数时,射线的几何轨迹应是一个圆弧,它的半径与速度梯度及射线的倾角有关。在实际情况中,海水中经常会出现表面波导,这种声道的存在不论对作用距离还是对自然噪声皆有重大的影响,所以声波在海洋中的传播是非常复杂的问题,会出现严重的多途效应。为分析方便起见,可将海洋介质视为水下声信道,它不但对目标信号进行能量变换(声传播损失),而且它对声源的发射波形也进行变换,它是时变、空变的随机信道。声波是目前已知的在海洋中传播最远的能量形式,然而同电磁波的速度相比,声波的传播速度非常慢,这一特点决定了声纳在工作方式上必然不同于PD雷达。
PD雷达是一种利用多普勒效应检测目标信号的脉冲雷达,它采用了相参技术,这是雷达技术的一大飞跃。相参是指信号之间保持严格的相位关系,在雷达中可以利用相参提取目标的有关信息。早期的普通脉冲雷达都是非相参系统,它们只是利用发射脉冲和回波脉冲的时间差提取目标的距离信息。当在目标距离相等处存在大量的干扰物的反射波时,微弱的目标回波就会被淹没。20 世纪 60 年代以后兴起的作战飞机的低空高速突防方式,就是利用了非相参雷达的这一弱点,大地和海浪杂波为进攻飞机提供了隐蔽和安全的保证。相参技术的引入,使上述问题得到一定程度的解决。因为当用时间差无法区分目标与背景干扰时,用速度却可以轻易地把它们区别开来。从运动目标反射的回波信号频率有别于固定目标回波的频率,利用这一差别就可以将运动目标和其它干扰区分开。
由于声波具有较慢的传播速度,从发射信号到接收回波的时间比较长,出于搜索效率和工作环境复杂程度等方面的考虑,声纳系统多采用单个脉冲搜索方式,且发射时采用宽波束。如果主动声纳也采用与PD雷达相类似的脉冲串的检测方式,首先由于声速太慢,检测周期太长,不符合先敌发现的原则;另外,由于水声环境更为复杂,信号的时间相干半径相对较小,当探测距离较远时,脉冲串中不同脉冲间难以保持稳定的相位关系,从而无法在较远距离上实施脉间测频。单频窄脉冲信号具有较高的距离分辨率和较小的检测盲区,但是其频率分辨能力却很低,对多普勒频移不敏感;长CW 脉冲具有良好的频率分辨率,适合于探测低速运动目标,并且具有较高的能量,有利于提高小目标的探测能力,缺点是距离分辨率较差。对于其他的大时间带宽积信号而言,它们同时具有高距离分辨率和频率分辨率,但是对于 STAP 方法而言,这些信号波形复杂,在空时平面上占据的范围较大,不利于STAP 处理。主动声纳需要在一个脉冲的回波内同时完成目标距离和频移的估计(对应于径向运动速度的估计),这就需要选择合适的脉宽和带宽。PD雷达脉冲宽度很窄,单个脉冲测频精度太低,需要依靠不同脉冲间的相位信息来测定目标的频移,采用这种机制的雷达不可避免地会出现距离模糊或速度模糊问题。高 PRF 会带来距离模糊,低 PRF 会带来速度模糊,中 PRF会使速度和距离均产生模糊。而采用单个脉冲工作的主动声纳,通过选择足够大的脉冲重复间隔(PRI)可以避免距离模糊,通过选择足够大的接收带宽和足够高的采样率可以避免速度模糊。声纳和雷达在工作环境和工作方式上的不同决定了进行 STAP 时,声纳接收信号的数据组织方式也是有别于雷达系统的。
2 混响空时数据模型
PD雷达采用相干脉冲串作为发射波形,脉冲串内的每个子脉冲均为窄脉冲。在一个相干处理间隔(CPI)内,得到所有 K 个脉冲的回波数据后,可以很自然地将接收数据按照距离门的方式进行排列,目标的搜索也是按距离门进行的,具体如图1(a)所示。其中阴影部分表示待检测的距离门数据,数据点数为 KN× ,其它距离门数据为辅助样本,用来估计干扰协方差矩阵,以得到 STAP 的加权系数。
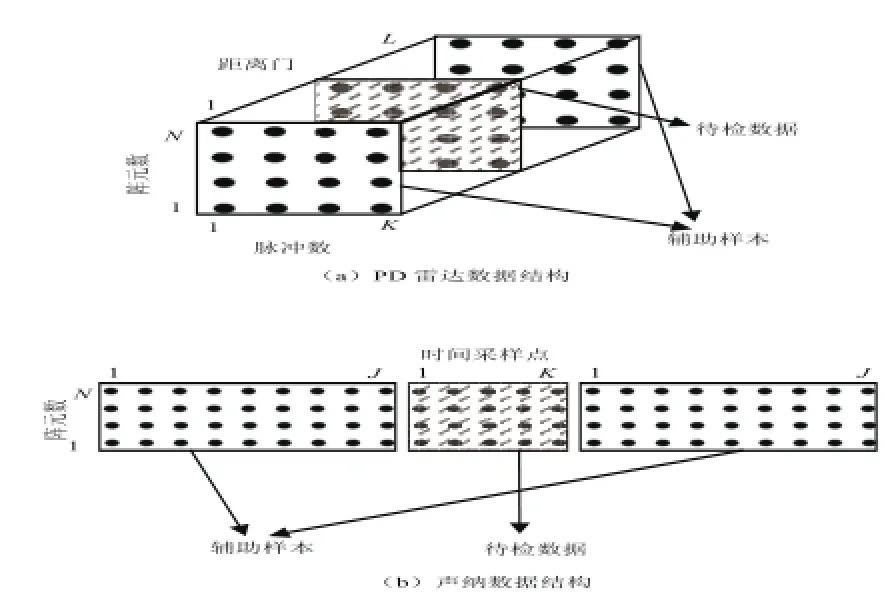
图1 PD 雷达与声纳数据结构图
多数声纳采用单个脉冲工作方式,即在一个探测周期内发射一个脉冲信号,所有的N个阵元接收到连续的混响回波,经时间采样后得到N个数据序列,具体见图1(b)所示。假设发射脉冲宽度为τ,则理想情况下点目标的回波是包含在长度约为τ的一段混响内,从接收到的N个序列中截取长度为τ的一段作为待检数据(假设包含K个时间采样点),如图中阴影部分所示,数据点数为 KN× 。在进行STAP 处理时,该段数据完整地包含了目标的信息,其地位就等同于雷达中待检距离门数据,时间采样点数 K 就等同于雷达中一个 CPI内的脉冲个数。 N个混响序列中其他部分的数据也称为辅助样本,与PD雷达的辅助样本不同,这些样本的时间点数并不一定恰好就等于目标信号的点数K,一般是大于K。在进行干扰协方差矩阵的估计时,需要从中选择与待检数据同样大小的数据点数( KN× )作为一个有效的辅助样本,具体选择方式要与待检数据一致。
雷达中一个 CPI内的脉冲个数 K 就是 STAP 的时域自由度。如果所检测的距离门存在目标的话,那么这一个距离门上K个脉冲中就完整包含了目标的信息,并且K越大,其频率分辨率越高,距离分辨率取决于单个脉冲的脉宽。同样,如果声纳发射脉冲宽度为τ的脉冲,τ越大,则频率分辨率越高,但是距离分辨率却会随之降低,所以脉宽τ的选择应当根据不同的需要,在频率分辨率和距离分辨率之间进行权衡折衷。
3 STAP 进行混响抑制的应用
根据信号的特点,用 STAP 来进行混响抑制主要可用于以下三个方面。
3.1 鱼雷自导声纳
鱼雷是一种重要的水中兵器,它可装载于水面舰艇、潜艇或由飞机携带,用于攻击敌水面舰船或潜艇。自导装置作为现代鱼雷最重要的组成部分之一,其性能好坏直接决定着鱼雷的性能,影响着鱼雷的作战使用效果。鱼雷具有高速运动的特点,而且工作频率高,这样,根据多普勒频移的基本规律,由于雷体运动而导致的混响谱展宽现象非常严重。通常低速运动目标的回波均会落在混响频移范围内,从而被强混响所掩盖,采用常规的检测方法难以取得好的效果。如果采用 STAP 处理,处理器的空时响应能够与接收到的混响空时二维谱相匹配,在强混响的位置处形成一定深度和宽度的凹口,在保证目标信号能顺利通过的前提下尽量压低剩余混响的强度。鱼雷自导声纳通常都是前视阵(阵列的轴线方向与阵列的运动方向垂直),这种结构的阵列混响谱在空时平面上分布较为复杂,给 STAP 处理增加了难度。
3.2 主动拖线阵声纳
目前拖线阵声纳已成为水面舰艇和潜艇的最重要的声纳装备之一,为了满足探测安静型潜艇的需要,现代拖线阵多具备主/被动联合方式工作的能力。当舰艇具有一定的运动速度时,主动拖线阵的混响同样会出现谱扩展的现象,不同方位的混响具有不同的多普勒频移。而且拖线阵阵元的排列方向是与舰艇的运动方向一致的,以此种方式布置的声基阵所接收的混响在频移与方位余弦平面上虽然也是呈现二维分布,但是混响频移与混响方位的余弦具有简单的线性关系,这一简单的关系有利于STAP 发挥出更佳的性能。
3.3 共形阵及其他类型的运动基阵
为了充分利用声纳载体的空间,增大基阵的尺寸,在鱼雷头部或是舰艇的艇体上可以按照各自的形状来布置阵元,即鱼雷共形阵和舰壳声纳。为了使声纳基阵远离本舰噪声,并且使其处于良好的水声环境中,探潜用的变深声纳(VDS)是用一根载重缆拖着的,通过改变缆长来实现上述目的。
以上的基阵形式都可以采用 STAP 方法进行混响的抑制。
从原理上讲,全维 STAP 方法适用于任意结构的基阵,只是不同的基阵结构会影响降维 STAP 的实际效果,而某些降维方法对共形阵是不适用的。如果基阵是固定不动的,混响在不同方位上的频移是相同的,采用 STAP 难以体现其空时联合处理的优势,相反还会增加系统的运算量,所以 STAP 更适合于运动平台声纳混响的抑制。
4 结语
虽然 STAP 在水声领域的发展较晚,并且水下复杂的环境也给 STAP 增加了难度,但是 STAP 所带来的处理性能的显著改善还是引起了人们的关注,将已经发展得较为成熟的 STAP 技术加以改造,用到主动声纳混响的抑制上来,将会使得声纳的探测效果得到很大的改善。
[1]空时自适应处理原理(第 3 版)[M]. 高等教育出版社,2009.
[2]毛士艺 . 脉冲多普勒雷达 [M]. 国防工业出版社 , 1990.
[3]惠俊英 . 水下声信道 [M]. 国防工业出版社 , 1992.
[4]林茂庸 ,柯有安 . 雷达信号理论 [M]. 国防工业出版社 , 1984.
[5]Karine Mio, Yves Chocheyras, Yves Doisy. Space Time Adaptive Processing for Low Frequency Sonar[A]. Oceans Conference Record (IEEE) [C], USA, 2000, 1315-1319.
TN911.2
A
1671-0711(2017)03(下)-0150-03
猜你喜欢
考试与评价·八年级版(2020年5期)2020-10-29 05:42:35
装备制造技术(2020年12期)2020-05-22 09:24:54
舰船电子工程(2018年11期)2018-11-26 07:55:08
水下无人系统学报(2018年5期)2018-11-09 07:40:54
电子测试(2018年14期)2018-09-26 06:04:12
剧作家(2018年2期)2018-09-10 01:47:18
声学与电子工程(2017年1期)2017-06-22 11:30:07
火控雷达技术(2016年2期)2016-02-06 02:29:03
西北工业大学学报(2015年3期)2015-12-14 13:08:44
西北工业大学学报(2015年3期)2015-12-14 13:08:44
