
基于单片机的智能循迹小车
2017-04-10 11:49程丛丛田为民秦雷
山东工业技术 2017年7期
关键词:超声波
程丛丛++田为民++秦雷
摘 要:本文研究的是智能循迹小车。该设计利用STC89C52单片机控制小车的四个电机的转动方向与速度,采用检测黑线的方法来控制智能小车的行走轨迹,使用了两个红外对管来检测黑线,同时用超声波传感器检测小车周围的障碍物。最终实现小车的自动循迹与避障功能。
关键词:STC89C52单片机;超声波;红外传感器
DOI:10.16640/j.cnki.37-1222/t.2017.07.002
1 引言
隨着汽车工业的快速发展,关于智能车的研究越来越受人关注,该设计可以 应用于考古,机器人,医疗器械等许多方面,现实意义很强。通过利用STC89C52单片机的内部资源与程序的相结合,通过L298N驱动来控制小车的转动方式,利用超声波模块设计小车的避障功能,最终使下车可以在不同路段安全平稳的行驶,不需要人为的去控制方向,达到无人监控的安全行驶效果。
2 基于智能循迹小车的总体设计方案
①项目是由STC89C52单片机最小系统板做为主控板,包括电源模块、电机驱动模块、超声波模块、红外传感器模块。
②通过超声波模块来感知前面的障碍物,当测得的距离值小于或者等于设定的距离值时,小车就会自动转向或者后退,来躲避障碍物,以此来达到避障的效果。
③红外传感器模块是小车必不可少的部分,使小车沿着指定的轨道方向前进,通过铺设不同的轨道,小车可以通过轨道的变化按不同的方案行驶。
3 硬件电路设计
硬件电路分为:电源模块、单片机最小系统模块、L298N电机驱动模块、红外感应模块、超声波模块。
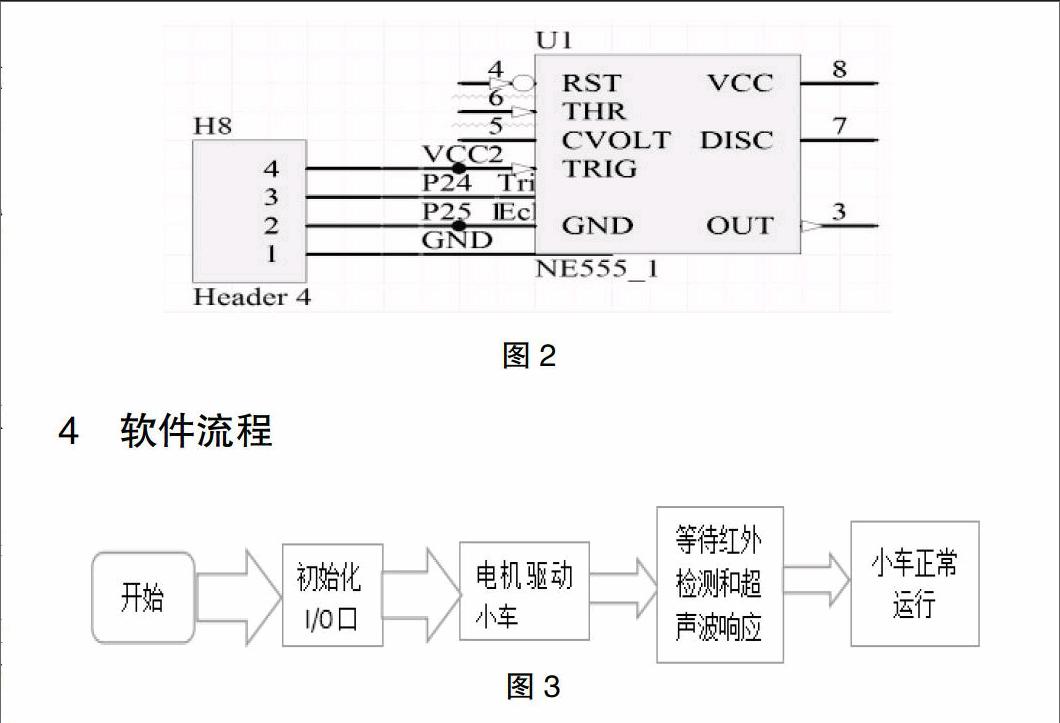
3.1 电源模块
首先我们利用稳压电源供电,稳压电源供电稳定方便调试,但是稳压电源体积大,只适合调试阶段的使用。
但是相对于稳压电源而言,干电池的体积较小,电压稳定,方便小车移动,所以我们采用两节18650电池来供电,然而单片机系统需要的是5V电源,所以我们要对电源进行降压处理,通过LM7805电源芯片稳成系统需要的5V电源。以下是设计的硬件图。
3.2 单片机最小系统模块
本系统采用STC89C52单片机作为中央处理器。他的主要任务是在小车行走过程中不断读取传感器采集到的数据,将得到的数据进行处理后,来控制小车的行走。
3.3 L298N电机驱动模块
电机驱动模块的主要功能是驱动小车轮子的转动,对电机驱动系统具有高转矩重量比、宽调速范围、高可靠性等要求。通过单片机的I/O口输入改变芯片控制端的电平,即可以对电机进行正反转、停止操作的控制。
3.4 红外感应模块
在本模块中我们采用TCRT5000 红外反射式光电传感器,TCRT5000 具有一个红外发射管和一个红外接收管,当发射管的红外信号反射被接收管接收后,接收管的电阻会发生变化,电阻的变化取决于接收管所接收的红外信号强度,常表现在反射面的颜色和反射面接收管的距离两方面。
3.5 超声波模块
超声波模块是主要通过信号的反射来计算距离,通过软件编程设置最小距离来实现小车的自动避障功能。
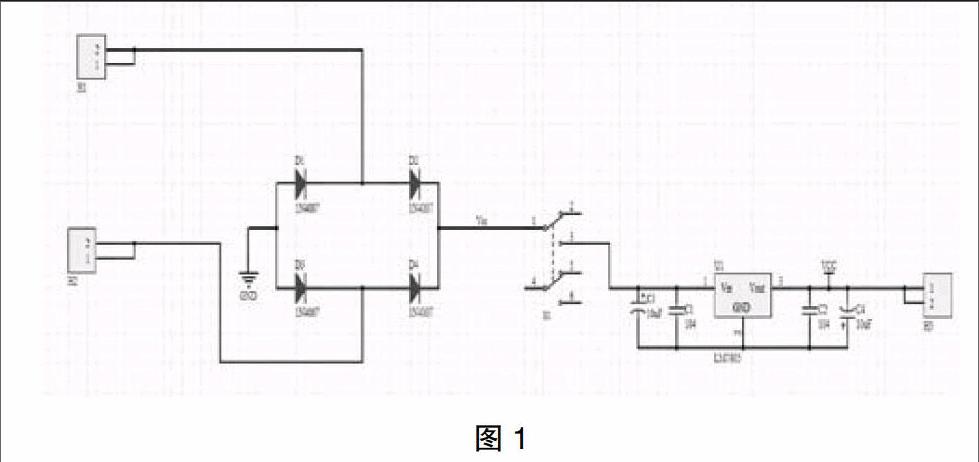
4 软件流程
5 总结
本文针对四轮小车的设计,对其结构、原理、软件设计、以及实现的功能进行了详细的介绍。此设计主要围绕自动循迹和避障这两个功能展开。循迹主要通过红外对灯对黑线的识别进行安全行驶,避障主要是通过超声波测距的设计实现小车对障碍物的避让。希望在今后的学习中,能够学到更多。
参考文献:
[1]姚佳.智能小车的蔽障及路径规划[D].东南大学硕士论文,2005.
[2]李广弟,朱月秀,冷祖祁.单片机基础[M].第三版,北京:北京航空航天大学出版社,2007.
[3]李朝春.单片机原理及接口技术[M].第三版,北京:北京航空航天大学出版社,2005.
[4]李金平,沈明山.电子系统设计[M].北京:电子工业出版社,2007.
项目经费:省级大学生创新创业项目;基于单片机的智能循迹小车(编号:201610379129)
作者简介:程丛丛(1995-),男,安徽怀宁人,学生,研究方向:单片机控制。
猜你喜欢
中国典型病例大全(2022年7期)2022-04-22
中国典型病例大全(2022年9期)2022-04-19
学苑创造·C版(2021年4期)2021-04-19
大自然探索(2021年11期)2021-01-05
家庭百事通·健康一点通(2020年11期)2020-11-30
今日健康(2020年3期)2020-06-29
小星星·阅读100分(高年级)(2019年3期)2019-04-19
小天使·六年级语数英综合(2018年10期)2018-10-15
科学与财富(2017年18期)2017-07-09
军事文摘·科学少年(2016年7期)2016-09-20
