红外相机光轴标定研究
2017-04-10 15:30陈继刚祝卿俞芳包晓峰余华昌张荣
光学仪器 2017年1期
陈继刚 祝卿 俞芳 包晓峰 余华昌 张荣福

摘要: 随着红外技术的不断发展,红外成像定位系统在现代工程测量中的应用越来越广泛。大部分测量系统一般都会选取红外相机的光轴作为系统的参照基准,因此红外相机的光轴标定的准确性将直接决定整套测量系统的准确度等级。激光跟踪仪是空间尺寸测量的一种常用仪器,它可以建立笛卡尔三维坐标系将空间任意点以坐标点形式表示出来,通过坐标点确定系统中点、线、面之间的几何位置关系。利用三靶球位置坐标原理将红外相机的光轴等虚拟参数以空间坐标点的方式标示出来,为后续试验人员的校准定位工作提供一定的技术依据和参考。
关键词:
红外相机; 激光跟踪仪; 光轴
中图分类号: TH 741文献标志码: Adoi: 10.3969/j.issn.10055630.2017.01.008
Study on calibration method of infrared camera optical axis
CHEN Jigang1,2, ZHU Qin2, YU Fang2, BAO Xiaofeng2, YU Huachang2, ZHANG Rongfu1
(1.School of OpticalElectrical and Compute Engineering, University
of Shanghai for Science and Technology, Shanghai 200093, China;
2.Shanghai Precision Metrology & Test Research Institute, Shanghai 201108, China)
Abstract:
With the development of infrared technology,the application of infrared imaging system in modern engineering measurement is more and more widely.Most of the measuring system generally choose the infrared camera optical axis as the reference system.So the accuracy of the optical axis and the image center of the infrared imaging system will directly determine the accuracy of the measurement system.Laser tracker is a kind of space size measurement instruments,which can mark any coordinate point by establishing 3d coordinate system and then use coordinate point to determine the position relations of point line,surface.A calibration method of infrared imaging system based on laser tracker auxiliary can obtain virtual axis camera 3d coordinate quickly and accurately to convenience for the operators.
Keywords:
infrared camera; laser tracker; optical axis
引言
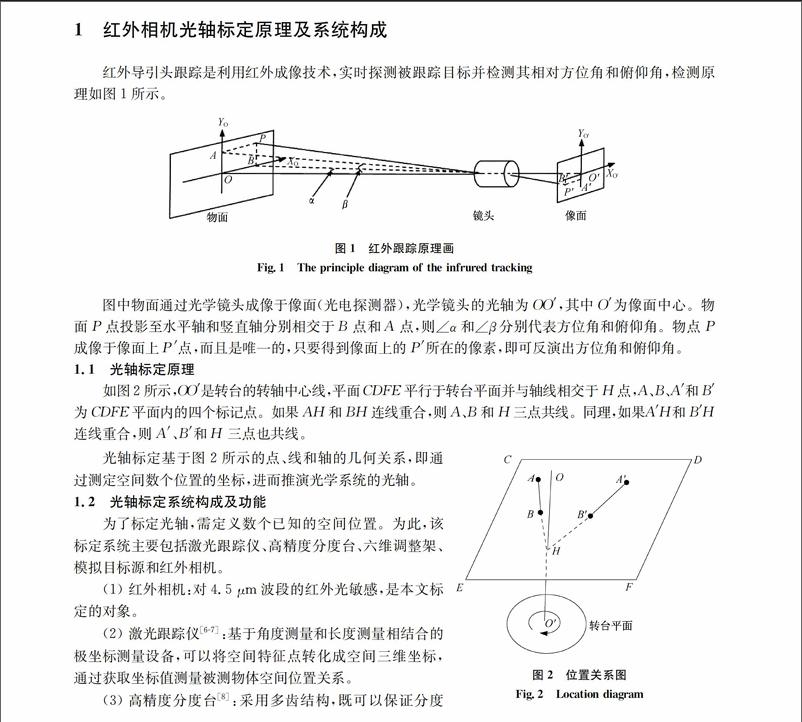
圖像检测因其非接触、并行、高效、适应范围广等特点,使其在现代工程测量中的应用越来越广。随着CCD应用领域的扩大,其结构性能也不断变化以适应不断发展的使用要求。目前已出现了多种CCD结构类型,从紫外到超长波红外不同波段的探测器,红外CCD也随之进入人们的视线[12]。由于摄像机镜头均有畸变等像差,测量时均需标定以减弱这些像差的影响[35]。在军事领域的应用发展尤为迅速,其中利用红外导引头的近距离跟踪系统是其典型应用。由于红外CCD被密封在隔热的真空体内,无法直接测量其准确位置,因此,本文利用激光跟踪仪,提出一种红外CCD相机光轴标定方法,即通过标定获得封装后的红外相机的像心及其光轴坐标值。
3结论
通过上述标定,无论将红外CCD相机置于何处,只要其相机的3个靶球互相位置不发生改变,通过各点坐标的转化即可得到像心和光轴坐标值。利用这种光轴标定方法,即可得到其相机在空间系统上的具体位置,以便测量应用。
参考文献:
[1]吴宗凡.红外热像仪的原理和技术发展[J].现代科学仪器,1997(2):2830.
[2]崔美玉.论红外热像仪的应用领域及技术特点[J].中国安防,2014(12):9093.
[3]张小玉,宫贺,齐琦.基于Open CV的长波红外摄像机标定研究[J].电子设计工程,2015,23(1):181184.
[4]马岩,王振宏,龚琳.基于RAC标定法的CCD摄像机参数标定技术研究[J].光学仪器,2012,34(2):1115.
[5]ZHANG Z.A flexible new technique for camera calibration[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2000,22(11):13301334.
[6]刘娇月,杨聚庆,董登峰,等.激光跟踪仪的光电瞄准与定位系统[J].光学 精密工程,2015,23(6):15581564.
[7]林心龙,周维虎,劳达宝.激光跟踪仪精密跟踪转台轴系优化设计[J].仪表技术与传感器,2015(4):2427.
[8]刘兴富.旋转体零件中心偏置时测点坐标值的求解方法[J].汽车零部件,2015(4):2526.
[9]孙博,邾继贵,任瑜,等.一种利用激光跟踪仪标定线阵相机的方法[J].光电子·激光,2014,25(2):2526.
[10]林嘉睿,邾继贵,张皓琳,等.激光跟踪仪测角误差的现场评价[J].仪器仪表学报,2012,32(2):463468.
[11]孙海丽,姚连璧,周跃寅,等.激光跟踪仪测量精度分析[J].大地测量与地球动力学,2015,35(1):177181.
[12]潘伯钊,宋轶民,王攀峰,等.基于激光跟踪仪的混联机器人快速零点标定方法[J].机械工程学报,2014,50(1):3137.
[13]周维虎,费业泰,李百源,等.激光跟踪仪几何误差修正[J].仪器仪表学报,2002,23(1):5659.
[14]黄鹏,王青,李江雄,等.激光跟踪仪三维坐标转换综合优化方法[J].计算机集成制造系统,2015,21(11):29122920.
[15]贺红林,凌普,吴少兴,等.喷涂机器人的激光跟踪测量法运动参数标定[J].控制工程,2016,23(8):11491155.
(编辑:张磊)
猜你喜欢
北京汽车(2023年1期)2023-03-03
中国交通信息化(2022年12期)2022-02-11
摄影之友(2020年12期)2020-12-23
汽车维修与保养(2020年11期)2020-06-09
机械研究与应用(2018年3期)2018-07-11
中国惯性技术学报(2017年1期)2017-06-09
光学精密工程(2016年3期)2016-11-07
西安建筑科技大学学报(自然科学版)(2014年6期)2014-11-10
应用光学(2014年3期)2014-06-01
应用光学(2014年6期)2014-03-27