
北斗和GPS双模接收机干扰抑制算法的设计与实现
2017-03-30 01:29张建立杨祖芳潘伟郑建生
中国空间科学技术 2017年1期
张建立,杨祖芳 ,潘伟,郑建生,3
1.武汉大学 GNSS中心, 武汉 430079 2.武汉工商学院 信息工程学院, 武汉 430065 3.武汉大学 电子信息学院, 武汉 430072
北斗和GPS双模接收机干扰抑制算法的设计与实现
张建立1,杨祖芳2,*,潘伟1,郑建生1,3
1.武汉大学 GNSS中心, 武汉 430079 2.武汉工商学院 信息工程学院, 武汉 430065 3.武汉大学 电子信息学院, 武汉 430072
目前北斗/GPS双模接收系统的抗干扰研究还比较少,主要是针对GPS的抗干扰研究。北斗和GPS接收机易被干扰,为了改善强干扰环境下接收机的性能,研究不同阵列、不同算法对接收机抗干扰性能的影响,在GPS的抗干扰研究的基础上设计并实现了一套北斗和GPS双模接收系统的抗干扰平台。实验结果表明,该系统能使北斗和GPS双模接收机在-30 dBm强干扰的环境下搜到6颗北斗导航卫星和5颗GPS导航卫星,并正常定位,说明该系统能达到干扰抑制的目的。该系统也可推广至多种卫星导航接收机的抗干扰平台。
北斗;全球定位系统;干扰抑制;双模接收机;抗干扰平台
近年来,随着导航技术在军事领域应用越来越多,电子对抗也被越来越多地出现在全球导航卫星系统(Global Navigation Satellite System,GNSS)中。在GNSS中,北斗定位系统和GPS定位系统是国内最常见的两种定位系统。压制式干扰会影响北斗和GPS接收机的正常工作,使得接收机的接收性能明显下降。随着北斗卫星近几年的发展,采用北斗卫星定位系统定位和导航也越来越普遍,GPS和北斗双模接收机也越来越多。这对GNSS抗干扰研究提出了新的问题。而且传统的接收机采用单天线结构,这种接收机的抗干扰性能很差,不能在强干扰环境下完成定位。因此,无论是从GPS和北斗系统的优势互补角度,还是为了完成从GPS到中国北斗系统的平滑过渡,研究北斗/GPS双模接收系统,同时支持GPS系统和北斗系统就变得非常重要而且迫切。目前,阵列天线结构的接收机已经成为导航领域解决抗干扰问题的优选技术。
本文用四阵元圆心阵阵列研究在北斗和GPS双模接收机在北斗B1频率和GPS L1频率双频点的干扰下的干扰抑制算法的实现和硬件验证平台的设计和实现。
1 算法设计
目前,在抗干扰算法中用的最多的是线性约束最小方差(LCMV)算法,该算法是通过最小均方差(LMS)算法改进而来的1]。功率倒置算法配合LCMV算法能很好地在干扰方向形成零陷。
1.1 算法模型2]
功率倒置是指将输入阵列中的信号按功率大小进行抑制,由其波形图可以看出信号强度越大,则抑制深度越大,所以抑制干扰就是根据干扰强度大于卫星信号强度进而抑制干扰信号。其中功率倒置函数表示为:

(1)
式中:W是根据输入信号阵列计算的权值。
功率倒置算法权向量的求解是建立在简单约束LCMV准则的基础上的,线性约束最小方差准则不需要知道卫星信号和干扰的方向,方法比较简单。它尽可能地保证了接收到的有用卫星信号无失真通过并且尽可能抑制干扰信号。最小方差误差准则即为误差函数均方差最小化,其函数表示为:
(2)
天线阵列输出功率可表示为:
(3)
式中:RX=E{XXH},为输入数据的自相关矩阵。构建拉格朗日函数得:
(4)
式中:λ为朗格拉日常数。令WL(W)=0,可得:
(5)
式(5)是利用功率倒置算法求出的最佳权向量。求出权值W后,再将输入信号X与权值W相乘得到结果Y,则Y就是抑制干扰后的卫星信号,X与Y的差即是抑制的干扰信号。
1.2 阵列模型
在阵列模型选择上,通过比较四阵元线阵、四阵元圆阵和四阵元圆心阵三种阵列模型仿真结果来说明各种阵列的抑制效果。这三种阵列模型如图1~图3所示。
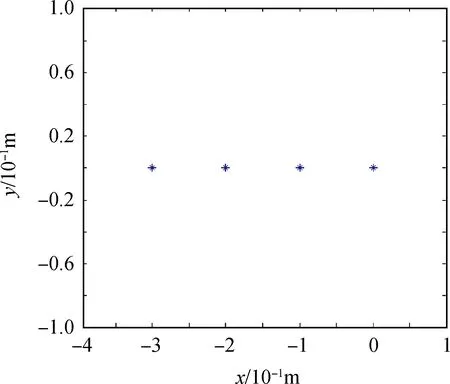
图1 四阵元线阵模型结构Fig.1 Structure of linear array model
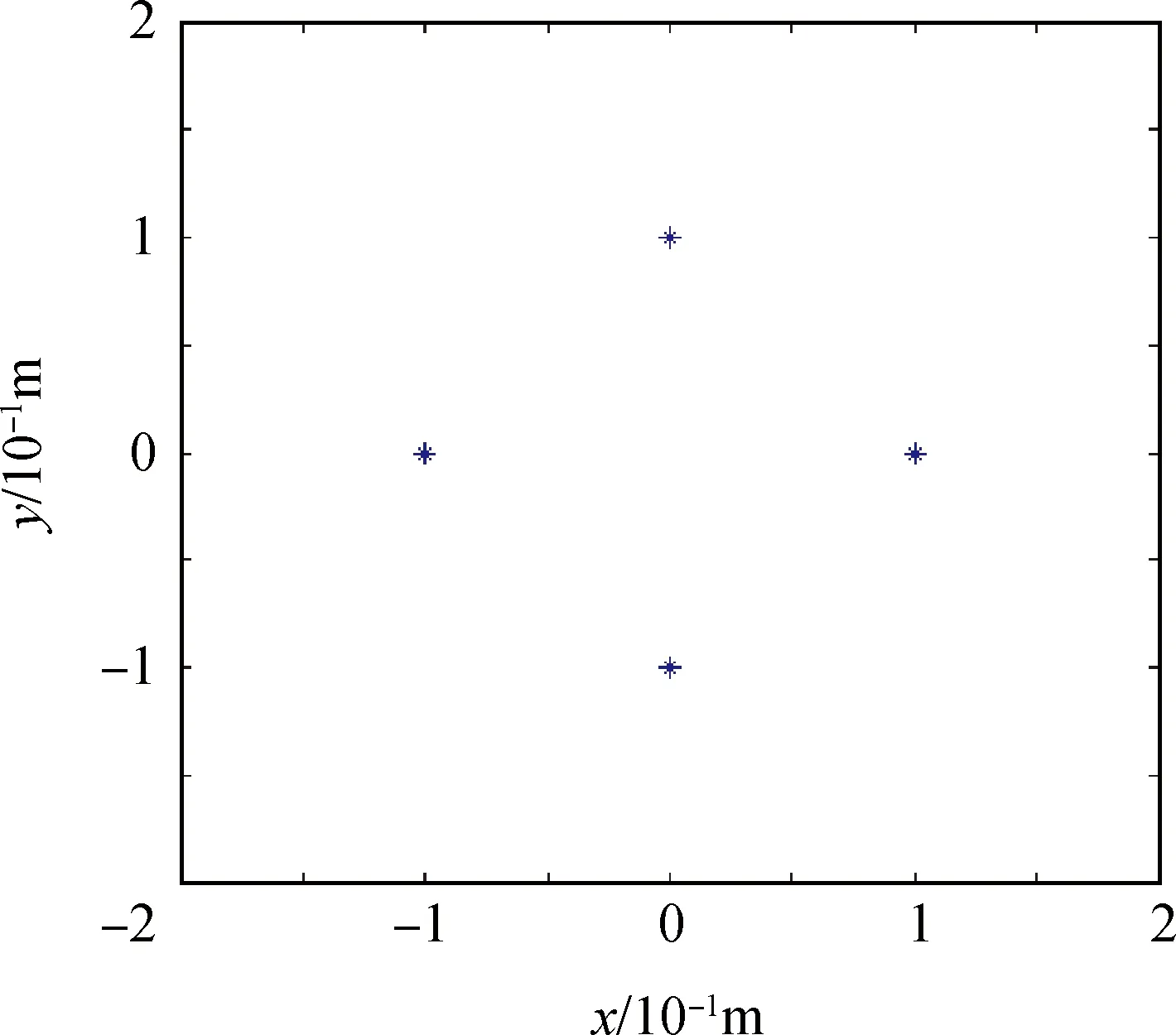
图2 四阵元圆阵模型结构Fig.2 Structure of circle array model
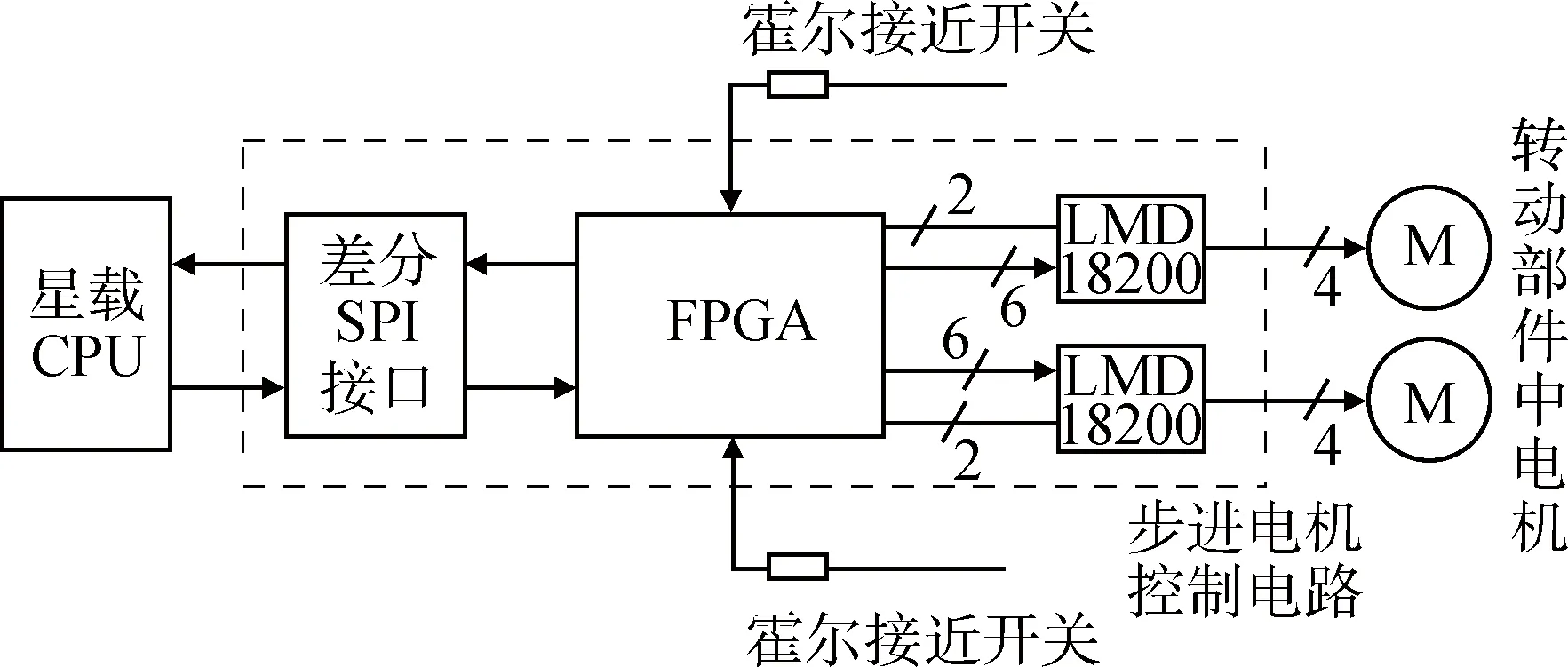
图3 四阵元圆心阵模型结构Fig.3 Structure of the circle with center array model
根据这三种模型的结构用Matlab仿真,干扰方向和数目等其他条件相同。仿真条件:在各种阵列模型的仿真中,GPS有用信号是通过C/A码调制的扩频信号,其中心频率f0=1 575.42MHz,北斗有用信号是通过北斗伪随机码码调制的扩频信号,其中心频率f1=1 561.098MHz,干扰为两个静态窄带单频干扰频率分别为f0=1 575.42MHz和f1=1 561.098MHz,正好对应GPS的L1频段和北斗的B1频段,输入信号的信干比为-80dB,噪声为高斯白噪声,信噪比为-30dB。相对四元均匀线阵,阵元之间的距离是中心频率f0波长的一半,GPS有用信号入射角为90°,北斗有用信号入射角为60°干扰分别从40°和50°入射;相对四元均匀圆阵和圆心阵,GPS有用信号入射角为90°方位角为0°,北斗有用信号入射角为60°方位角为80°,干扰分别从入射角40°方位角为100°和入射角50°方位角为160°入射。仿真结果如图4~图6所示。
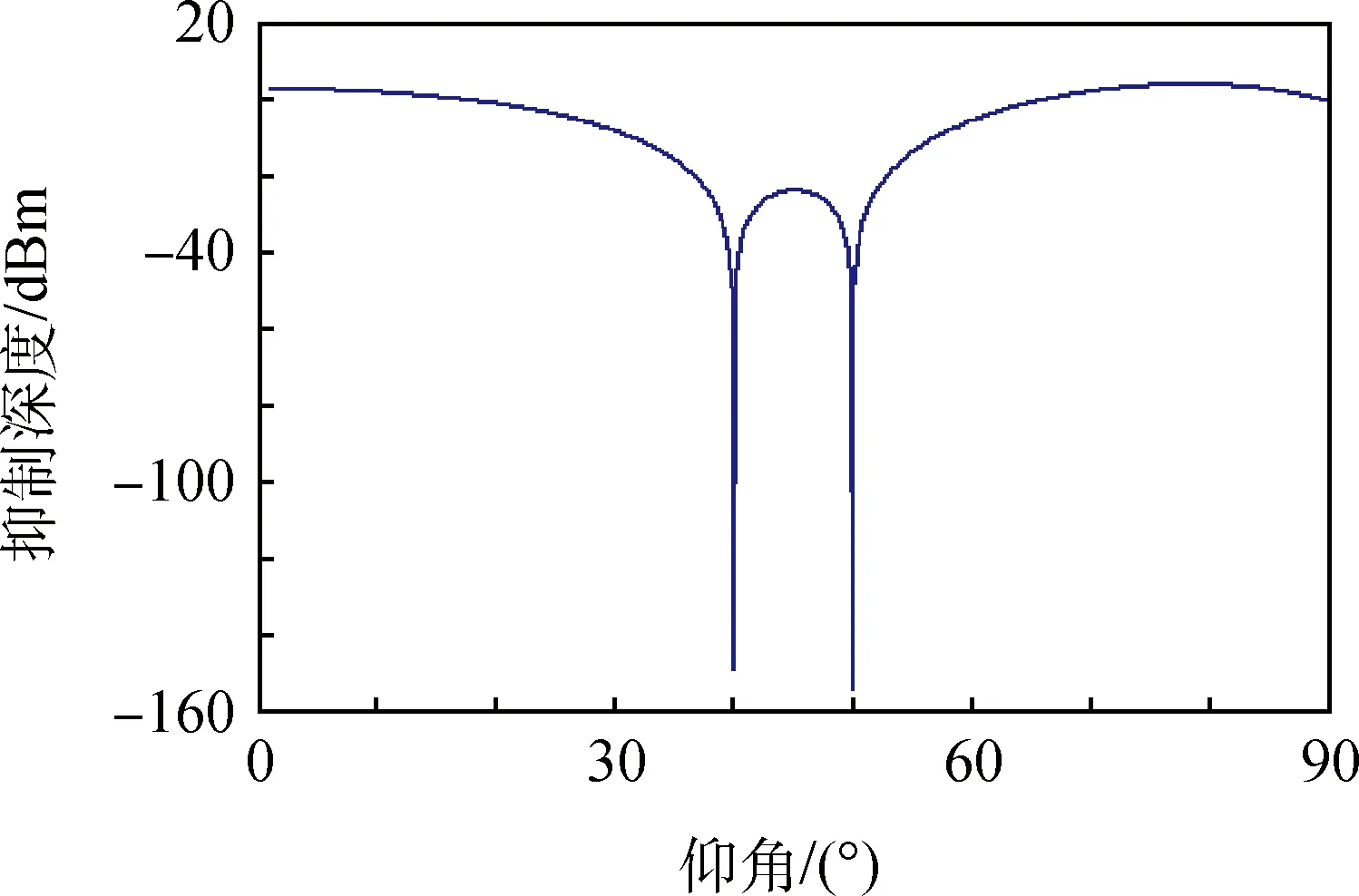
图4 四阵元线阵模型仿真结果Fig.4 Result of linear array model simulation
图4可以看出四阵元的线阵能在干扰方向形成较深的零陷,但是线性阵列只能在仰角方向形成零陷,这影响接收机接收非干扰方向的卫星信号。
图5 四阵元圆阵模型仿真结果Fig.5 Result of circle array model simulation
图5可以看出四阵元圆形阵列能在仰角和方位角三维空间上形成零陷,虽然也能在干扰方向上形成较深的零陷,但是在非干扰方向也形成了较浅的零陷,这将导致非干扰方向的有用信号被抑制。
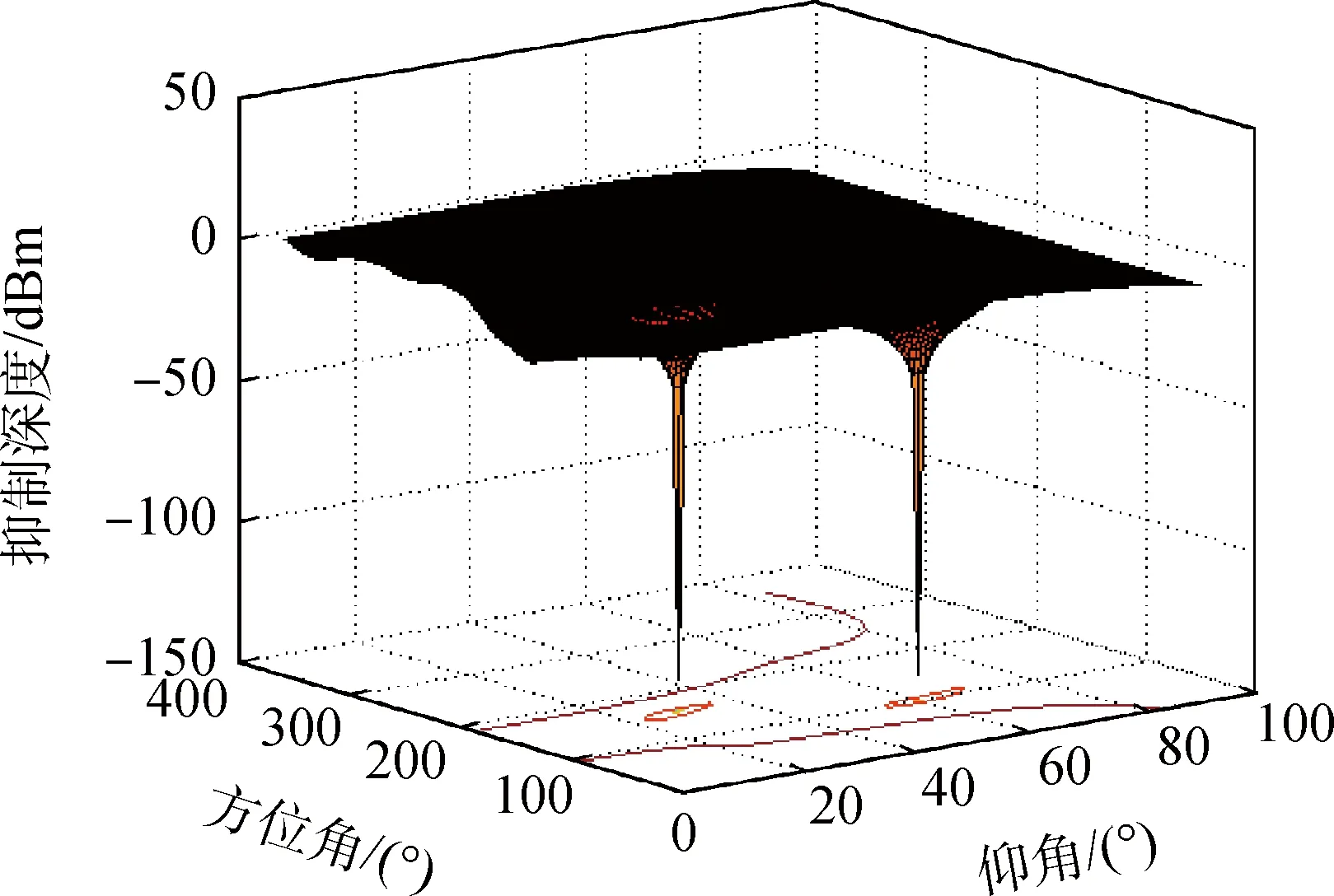
图6 四阵元圆心阵模型结果Fig.6 Result of the circle with center array model simulation
而图6可以看出圆心阵相较于圆阵效果有明显提升,既零陷较为集中。通过以上仿真和效果分析,能够说明这三种阵列从效果上四阵元圆心阵干扰抑制效果最好。
2 硬件平台设计
硬件平台需要完成卫星信号的数据采集、数据处理和卫星信号的输出等多个任务。按照功能主要分为数据采集和数据处理两个模块。硬件平台系统结构框图如图7所示。
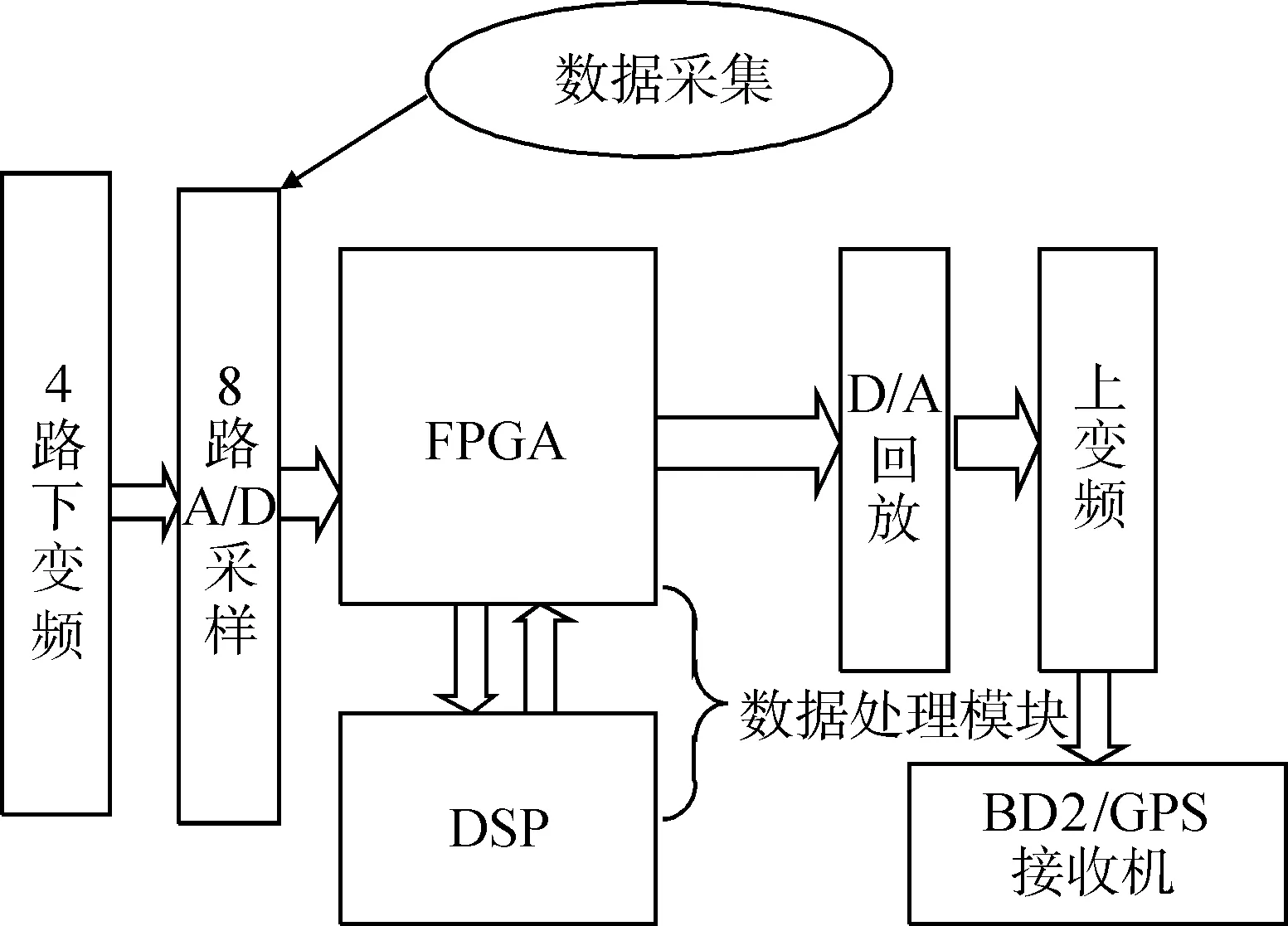
图7 系统结构框图Fig.7 Structure chart of system
2.1 数据采集模块
数据采集通信模块主要完成卫星信号的采集,数据的A/D转换。卫星信号包含GPSL1频段信号和北斗B1频段信号。GPSL1频段的频率是1 575.42MHz,北斗B1频段的频率是1 561.098MHz。BD/GPS天线频率是1 575.42MHz/1 561MHz带宽10MHz,符合BD/GPS双模接收机要求。该模块首先四阵元天线接收信号,在采用4路正交下变频,分别将1 575.42MHz的GPS信号下变频到15.42MHz,将1 561.098MHz的北斗信号下变频到1.098MHz,这样可以将两个不同频点的卫星信号下变频到都可处理的范围。再将8路模拟信号用31MHz时钟采样到数字信号,同时完成A/D转换,其中A/D采样是被FPGA控制。模拟信号转换成数字信号后直接给到FPGA进行数据处理,经过干扰抑制算法处理后的信号经D/A转换成模拟信号,然后再正交上变频成射频信号。分别将1.098MHz的信号上变频到北斗B1频段信号,将15.42MHz的信号上变频到GPSL1频段信号,最后再将抑制处理后信号传给北斗/GPS双模接收机完成定位。
本设计中FPGA采用Altera公司的StratixⅢ 系列高性能FPGA芯片EP3SE110F115213N作为核心处理器,FPGA上挂载的三态门、同步动态随机存取器(SynchronousDynamicRandomAccessMemory,SDRAM)、静态随机存取器(StaticRandomAccessMemory,SRAM)、快闪式存储器(FlashMemory)由Avalon总线调度完成。8路独立12位A/D采用AnalogDevice公司AD9233芯片进行A/D采样,D/A采用AnalogDevice公司D/A转换芯片AD9777,4路正交下变频模块的芯片采用AD8347作为主模块,两路正交上变频模块的上变频芯片采用ADL5375,实现正交信号调制到射频频段输出。基带信号也可通过数模转换后输出给频谱分析仪,或经上变频芯片后输出给频谱分析仪,还可将基带数据通过通用串行总线(UniversalSerialBus,USB)传给上位机做后处理。
2.2 数据处理模块
数据处理模块主要做抗干扰的算法,这里采用功率倒置算法,数据采集模块出来的8路数字信号由FPGA做卷积自相关,再交由DSP做矩阵求逆和计算权值,然后再返回FPGA与8路信号相乘完成干扰抑制。
由于卫星信号数据速率很高,并且数据由八路数据组成,计算量很大,所以数据采集和处理由FPGA和DSP共同完成。本设计中FPGA负责信号的高速采集,DSP负责数字信号处理。在选用处理器时,在满足抗干扰算法的实时性要求的基础上,同时考虑处理器的功耗、体积、成本等多种因素,最终采用了TI公司的TMS320C6713B芯片作为硬件平台的核心处理器。
由于DSP芯片内部RAM存储空间有限,需要使用外部SDRAM芯片作为DSP的数据存储器。SDRAM芯片用Micron的MT48LC4M32B2芯片,其存储空间为128Mbit,32位总线。满足处理器对数据的存储要求。C6713B芯片内部ROM存储空间有限,需要扩展外部Flash存储器实现程序的存储。上电后,DSP运行引导程序将Flash内的程序加载到DSP的RAM中,从而实现程序的运行。Flash芯片选用SST公司的SST39VF1601芯片,存储空间为16Mbit,Flash存储占用DSP存储CE1空间,SST39VF1601片选信号与DSP芯片的TEC1n连接。
DSP芯片外围存储设备的片选信号、读写信号先写到FPGA内部,然后与DSP连接,这样设计不仅可以简化电路图PCB布局,便于电路系统调试,更有助于提高稳定性。
数据采集和数据处理模块间系统用DSP与FPGA相连,在FPGA中用三态桥控制FPGA和DSP的连接,DSP与FPGA引脚相连情况如图8所示。A2-A21是地址信号,D0-D31是数据信号,CS_N是使能信号,WR_N是写使能信号,OE_N是读使能信号。
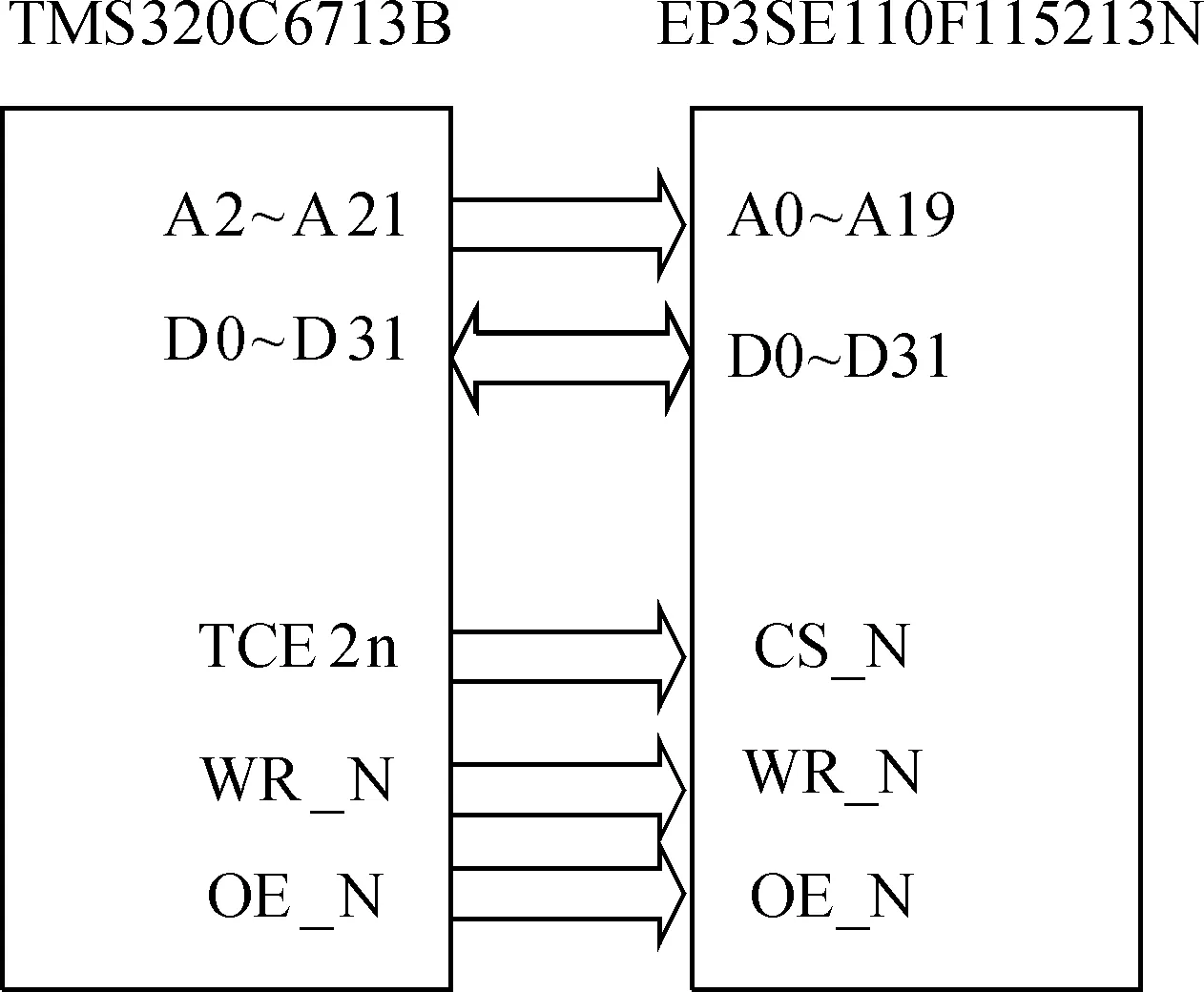
图8 DSP与FPGA接口Fig.8 Interface of DSP and FPGA
3 实验验证
本实验通过软硬件设计,构建成了卫星抗干扰验证平台。为了测试该平台的性能,用信号发生器产生1 575.42MHz的信号和1 561.098MHz的信号作为干扰,在做干扰实验前先做了无干扰是接收机的搜星能力实验。无干扰时软件截图如图9所示。
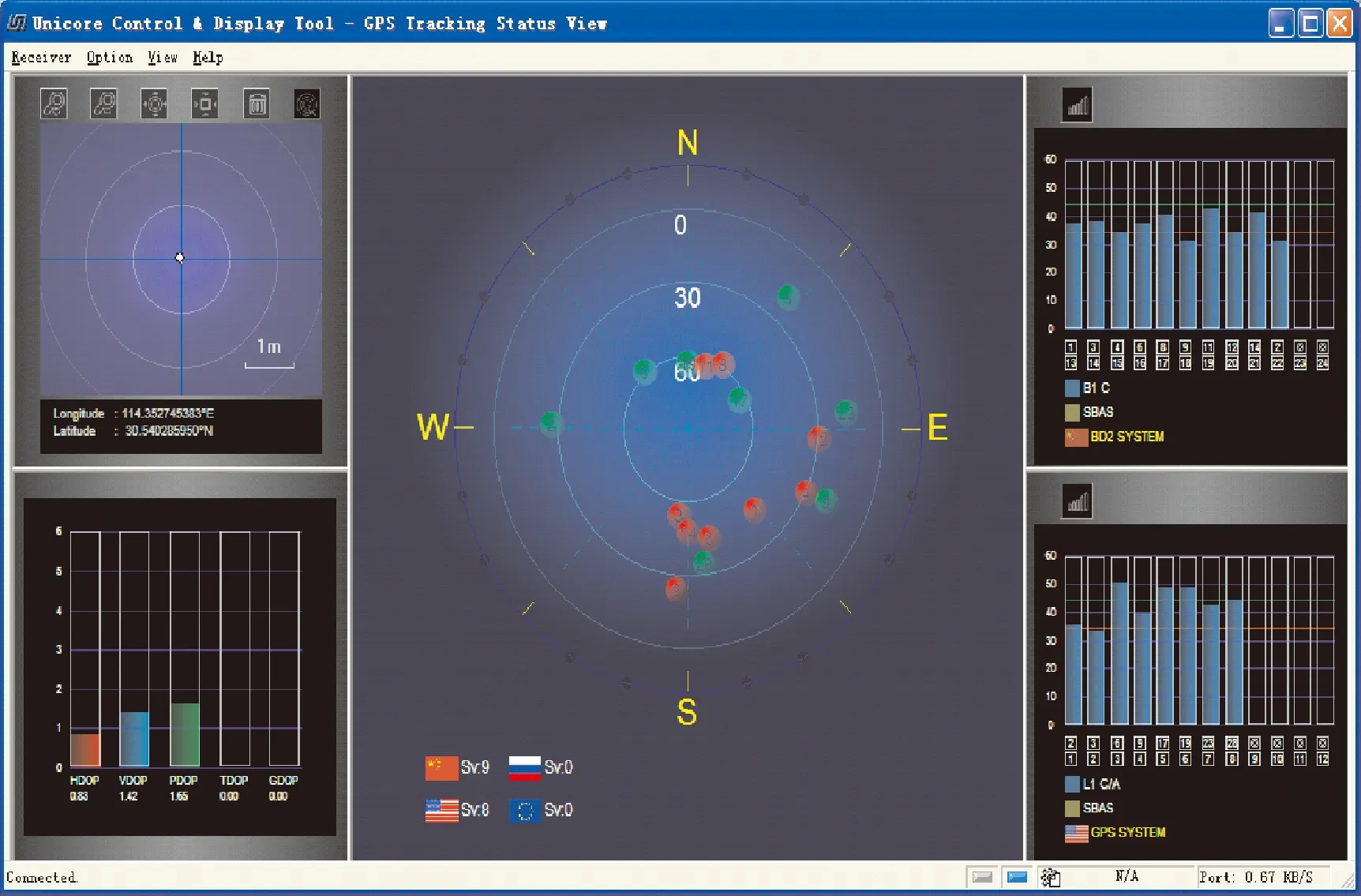
图9 无干扰接收机搜星图Fig.9 Figure of no interference
从图9可以看出接收机在无干扰下未加算法时搜到导航卫星情况,红色卫星代表北斗卫星,绿色代表GPS卫星。接收机能收到北斗导航卫星10颗,GPS导航卫星8颗,并能正常定位。
接着做加干扰的实验,对实验进行统计。在不加抗干扰算法的情况下接收机搜星情况如表1所示。
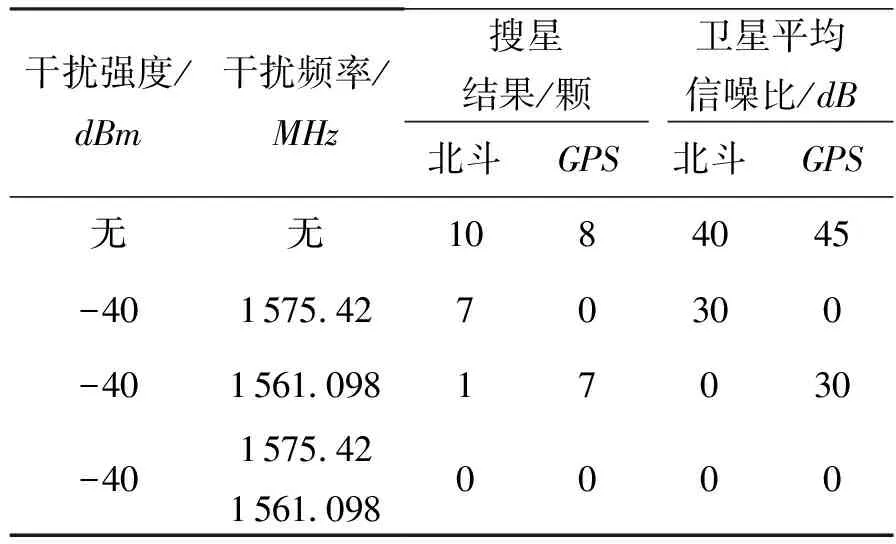
表1 接收机搜星境况(不加干扰抑制算法)
表1说明接收机在无干扰情况下搜星效果很好,北斗和GPS两种卫星都能搜到并完成定位;在-40dBm频率为1 575.42MHz的强干扰下接收机只能搜到7颗北斗卫星,不能搜到GPS卫星,但能完成定位,说明频率为1 575.42MHz的干扰主要影响GPS导航卫星的L1频段的信号,对北斗B1频段的信号影响不大;在-40dBm频率为1 561.098MHz的强干扰下接收机只能搜到1颗北斗卫星,GPS导航卫星也有影响,能搜到7颗GPS卫星,能利用GPS导航卫星完成定位,说明频率为1 561.098MHz的干扰主要影响北斗导航卫星的B1频段的信号,对GPSL1频段的信号也有影响;在-40dBm频率为1 575.42MHz和-40dBm频率为1 561.098MHz的强干扰下接收机不能搜到北斗卫星,也不能搜到GPS卫星,不能完成定位。结果如图10所示。

图10 双干扰接收机搜星图Fig.10 Figure of double interference
实验表明:北斗/GPS接收机在-40dBm频率为1 575.42MHz强干扰下接收机不能搜到GPS卫星和-40dBm频率为1 561.098MHz的强干扰下接收机不能搜到北斗卫星。经抗干扰硬件平台处理后的北斗/GPS接收机搜星情况如表2所示。
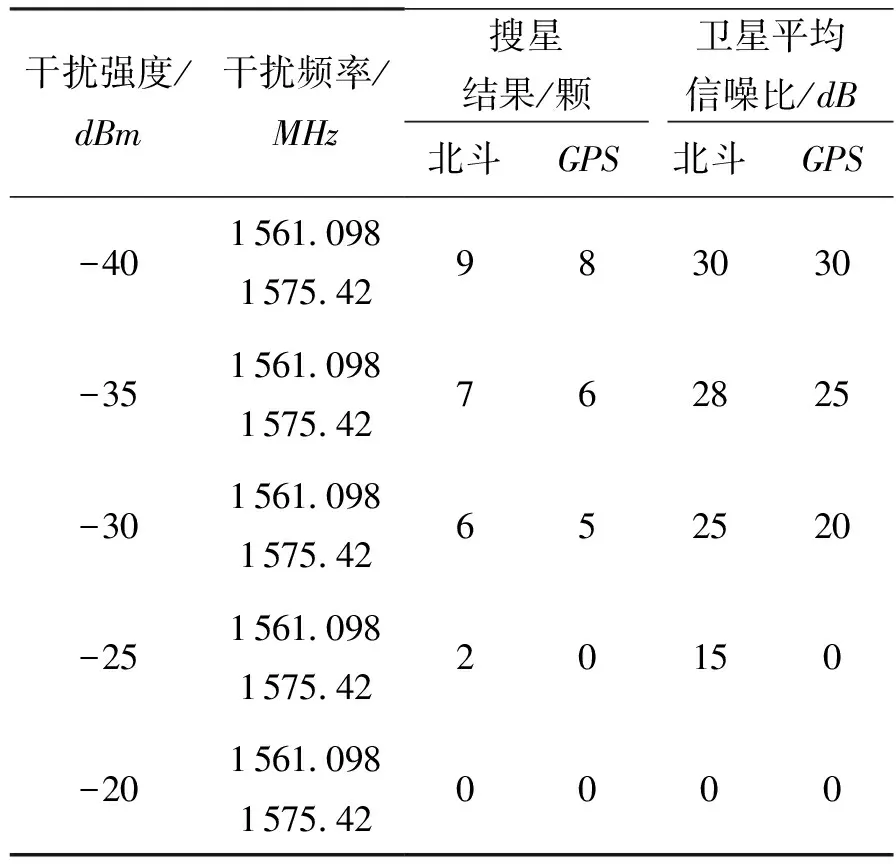
表2 接收机搜星情况(加算法)
表2表明,经抗干扰硬件平台处理后,北斗/GPS接收机在干扰强度为-20dBm、频率为1 575.42MHz的强干扰下接收机已经完全不能搜到GPS卫星,-20dBm频率为1 561.098MHz的强干扰接收机已经完全不能搜到北斗导航卫星,但干扰强度为-30dBm时BD/GPS接收机能搜到北斗卫星6颗,GPS卫星5颗,并能正常定位。干扰强度为-30dBm能搜星时软件截图如图11所示。

图11 -30 dBm接收机搜星图Fig.11 Figure of -30 dBm receiver searching
从图11可以看出,在-30dBm频率为1 575.42MHz强干扰和-30dBm频率为1 561.098MHz的强干扰下BD/GPS接收机搜到北斗卫星6颗、GPS卫星5颗并能正常定位。
硬件平台将抑制后的基带信号从15.42MHz上变频到1 575.42MHz,图12(a)代表未抑制的效果,图12(b)代表抑制后的效果。对比这两幅图,可以看出抗干扰算法是有效的,1 575.42MHz处的干扰尖峰基本消除。
4 结束语
为了提高GNSS接收机的抗干扰性能,适应BD/GPS双频接收机的抗干扰要求,本文针对功率倒置算法和阵列模型做了研究和比较,将四阵元圆心阵的抗干扰算法应用在北斗和GPS双模接收机上,并通过硬件验证平台将其实现。在此目的下,分析了编程的框架,详细说明了其工作原理,搭建验证平台,完成了抗干扰系统的设计。实验表明,在该系统未加干扰抑制算法时,接收机在干扰强度为-40dBm时已经完全不能搜索到卫星,而在运行算法系统正常运行时,接收机能够在-30dBm的强干扰环境下进行干扰抑制,使接收机能够搜到北斗卫星6颗,GPS卫星5颗,能够正常定位。
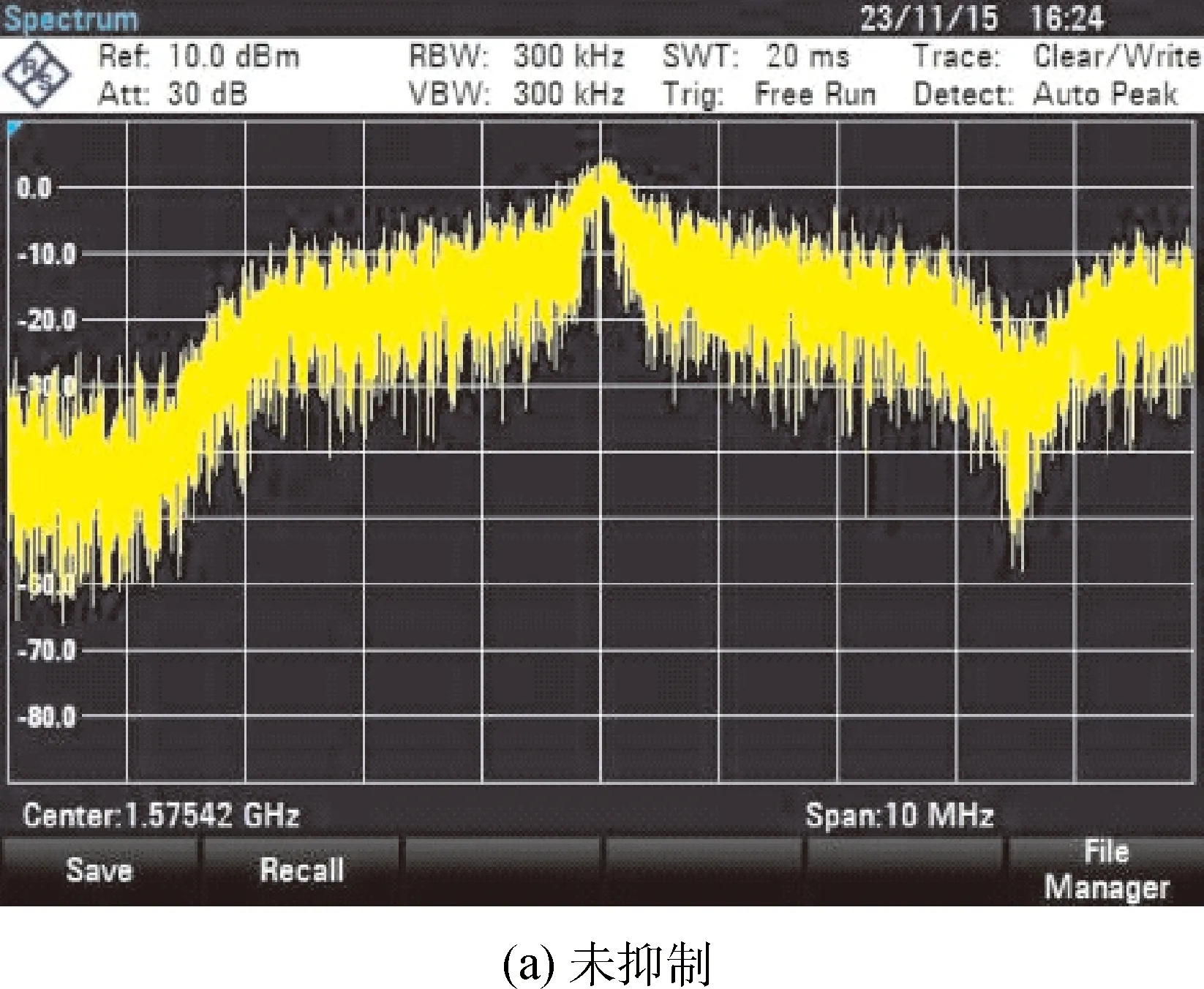
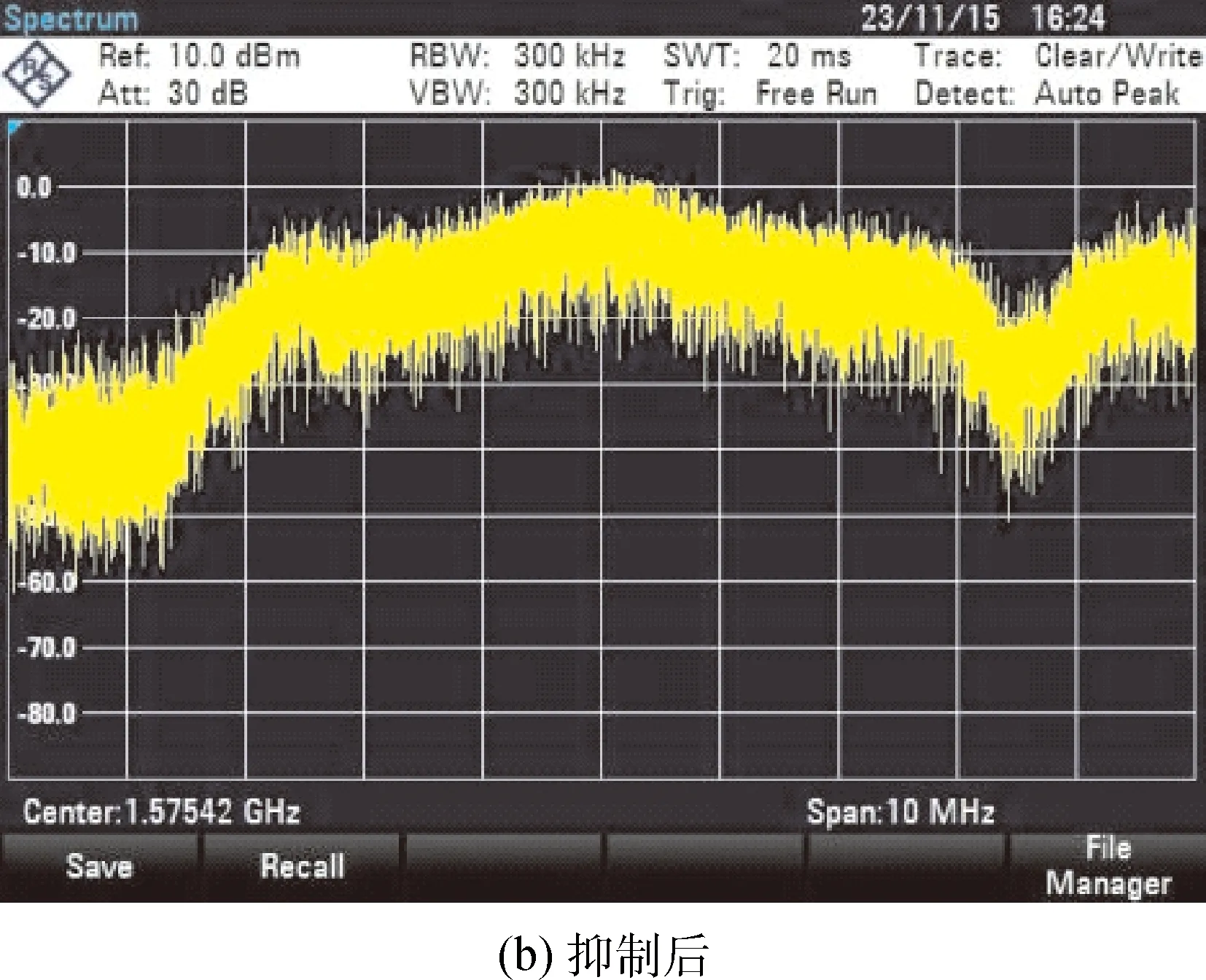
图12 抑制前后效果对比Fig.12 Contrast before and after inhibition
这说明四元圆心阵列形成的干扰平台能够使北斗GPS双模接收机在强干扰下正常工作,达到了抑制干扰的目的。
References)
[1] 王磊,胡永辉,华宇.一种自适应调零阵的LCMV算法J].华东理工大学学报(自然科学版),2007;33(5):688-691.
WANG L, HU Y H, HUA YU. An adaptive nulling array LCMV algorithmJ]. Journal of East China University of Science and Technology (Natural Science Edition), 2007;33(5):688-691(in Chinese).
[2] MADER G. GPS antenna calibration at national geodetic surveyJ].GPS Solution,1993,3(1):50-58.
[3] 岳志刚.卫星导航系统中基于天线阵列的干扰抑制技术研究D].武汉:武汉大学,2011(in Chinese).
YUE Z G. Satellite navigation system based on interference suppression of the antenna array technology researchD].Wuhan:Wuhan university, 2011(in Chinese).
[4] 宋云龙.智能天线的自适应波束形成算法的研究D].重庆:重庆大学,2012.
SONG Y L. The adaptive beamforming algorithm of smart antenna researchD]. Chongqing:Chongqing University, 2012(in Chinese).
[5] 王新怀.卫星导航抗干扰接收系统技术研究D].西安:西安电子科技大学,2016.
WANG X H.Navigation anti-jamming satellite receiving system Technology researchD].Xi′an:Xi′an University of Electronic Science and Technology, 2016(in Chinese).
[6] The Congress of the United States, Congressional Budget Office. The global positioning system for military users: current modernization plans and alternativesR].S.l.]:CBO,2011.
[7] 廖群,郑建生,黄超,等.GPS自适应抗干扰算法及其FPGA实现J].现代雷达,2006(4),79-85.
LIAO Q, ZHENG J S, HUANG C,et al.GPS adaptive anti-jamming algorithm and its FPGA implementationJ]. Modern Radar,2006(4):79-85(in Chinese).
[8] 温媛媛,陈豪.卫星接收系统抗干扰的卷积盲分离算法J].中国空间科学技术, 2012,32(4):48-54.
WEN Y Y,CHEN H. Satellite receiving system anti-interferenceconvolutional blind separation algorithm is proposedJ].Chinese Space Science and Technology.2012,32(2):48-54(in Chinese).
[9] 王璐,刘崇华,何善宝.导航BOC信号的抗干扰性能分析J].中国空间科学技术, 2009,29(8):69-76.
WANG L, LIU C H, HE S B. Navigation of BOC signal anti-jamming performance analysisJ].Chinese Space Science and Technology,2009,29(8):69-76(in Chinese).
(编辑:高珍)
Design and implementation of interference suppression algorithm for BeiDou and GPS dual-frequency receiver
ZHANG Jianli1,YANG Zufang2,*,PAN Wei1,ZHENG Jiansheng1,3
1.GNSSCenter,WuhanUniversity,Wuhan430079,China2.SchoolofInformationEngineering,WuhanTechnologyandBusinessUniversity,Wuhan430065,China3.SchoolofElectronicInformation,WuhanUniversity,Wuhan430079,China
BeiDou and GPS receivers are susceptible to interference. In order to improve the performance of the receiver under strong jamming environment,the effects of different arrays and different algorithms on the anti-jamming performance of the receiver were studied.An anti-jamming platform for BeiDou and GPS dual-mode receiving system was designed and implemented on the basis of GPS anti-interference research. The experimental results show that by this system,the BeiDou and GPS dual-mode receivers can search up to 6 BeiDou navigation satellites and 5 GPS navigation satellites,and locate under the environment of -30 dBm strong interference.The system can also be extended to a variety of satellite navigation receivers anti-jamming platform.
BeiDou; GPS; interference suppression; dual-mode receiver; anti-interference platform
10.16708/j.cnki.1000-758X.2017.0007
2016-07-12;
2016-11-24;录用日期:2016-02-15;
时间:2017-02-16 18:43:03
http:∥www.cnki.net/kcms/detail/11.1859.V.20170216.1843.011.html
国家自然科学基金(GNSS接受系统在高动态环境下的干扰抑制技术研究,61273053);武汉工商学院2016年度科研基金(GPS C/A码导航电文采集系统,A2016008)
张建立(1990-),男,硕士研究生,zhangjianli900423@163.com,研究方向为卫星通信抗干扰
*通讯作者:杨祖芳(1981-),女,讲师,yzf2110@163.com,研究方向为电子线路与嵌入式系统
张建立,杨祖芳,潘伟,等.北斗和GPS双模接收机干扰抑制算法的设计与实现J].中国科学技术,2017,37(1):117-123.ZHANGJianli,YANGZufang,PANWei,etal.DesignandimplementationofinterferencesuppressionalgorithmforBeiDouandGPSdual-frequencyreceiverJ].ChineseSpaceScienceandTechnology, 2017,37(1):117-123(inChinese).
TN927.2
A
http:∥zgkj.cast.cn
猜你喜欢
小哥白尼(神奇星球)(2022年3期)2022-06-06
导航定位学报(2022年1期)2022-02-17
中国传媒大学学报(自然科学版)(2021年1期)2021-06-09
地震研究(2021年1期)2021-04-13
航天电子对抗(2019年4期)2019-12-04
当代陕西(2019年18期)2019-10-17
电子制作(2019年24期)2019-02-23
电子制作(2018年19期)2018-11-14
电子制作(2016年1期)2016-11-07
太空探索(2016年12期)2016-07-18
