
波浪扰动对水下航行体垂直出水运动影响研究
2017-03-29 10:07李智生阎肖鹏
无线电工程 2017年4期
李智生,阎肖鹏,李 钊
(1.中国人民解放军91550部队,辽宁 大连 116023;2.火箭军驻石家庄地区军事代表室,河北 石家庄 050002)
波浪扰动对水下航行体垂直出水运动影响研究
李智生1,阎肖鹏1,李 钊2
(1.中国人民解放军91550部队,辽宁 大连 116023;2.火箭军驻石家庄地区军事代表室,河北 石家庄 050002)
针对波浪扰动条件下水下垂直发射航行体出水姿态参数确定问题,建立了基于沿轴向切片方法的航行体在波浪扰动下的受力模型,结合航行体水中运动数学模型,采用计算航行体每一切片横截面受到波浪的惯性力、力矩方法,仿真分析了波浪对航行体出水姿态参数的影响。仿真结果表明,浪级越高,对航行体出水姿态角的扰动越强烈。浪向角为90°时,对航行体运动参数影响最大。
水下航行体;轴向切片方法;浪级和浪向; 出水姿态参数
0 引言
水下航行体在近水面航行时,其运动不可避免地受到波浪的影响,从而使航行体的弹道出水参数发生改变,导致其俯仰角、偏航角的改变,影响航行体飞行姿态,甚至破坏壳体结构,使发射失败。因此,研究水下航行体出水过程中波浪力对其力学参数、运动参数的影响就变得尤为重要[1-2]。
文献[3-5] 采用数值模拟方法,研究了5级海情条件下,水下航行体模型水下垂直发射时二阶Stokes波对其流场、力学特性等的影响。文献[6-7] 基于Flunet软件,首先通过入射边界造波法对不同等级、不同类型的波浪进行数值模拟,在此基础上研究了波浪对航行体出水过程的影响。文献[8-9]基于波浪流动数学模型和造波方法的数值波浪水槽,采用CFD方法,对多海况等级、多波浪相位下航行体出水过程进行模拟。目前国内外的研究主要通过计算流体力学方法获得航行体出水过程的压力场分布[10],进而得到波浪对水下航行体运动的影响,该方法计算周期较长、过程复杂。
本文建立了基于沿轴向切片方法的航行体在波浪扰动下的受力模型,结合航行体水中运动数学模型,采用计算航行体每一切片横截面受到波浪的惯性力、力矩方法,仿真分析了波浪对航行体出水姿态参数的影响。
1 水下航行体运动方程组
在xy平面内研究航行体在水中的运动,建立体轴坐标系x0y0z0,其原点在运动体的重心,y0轴与运动体的纵轴重合,在该坐标系内建立的描述水下航行体运动数学模型为:

(1)
式中,A为浮力;G为重力;Jz0为航行体绕z0轴的惯性矩;M为航行体的质量;MTz0为发动机推力产生的力矩;MAz0为浮力产生的力矩;MBz0为航行体的俯仰力矩;Mgz0为水对航行体的惯性作用力矩;Pg为水对航行体的惯性作用力;T为发动机推力;v为航行体的线速度;y0为航行体纵轴;x0为航行体的法向轴;α为攻角;ϑ为弹道倾角;θ为俯仰角;ω为运动体角速度。
2 波浪扰动模型
波浪场可以分成压力场和速度场,因此,波浪对航行体的作用力可分为由波浪压力场引起的作用力和由波浪质点的轨迹速度引起的作用力。整个航行体上所受的波浪力采用切片方法进行计算。
2.1 不规则波浪模型
描述海洋实际不规则波浪的方法是利用不同初始相位的规则余弦波进行叠加。假定波系中每个波浪的初始相位以相同的概率在0~2π之间随机散布,而且不同频域规则波的初始相位之间是互不相关的。于是,不规则波浪可用下式描述:

而规则波的波幅dA(ω)为:

(2)
式中,Sx(ω)为随机波浪的频谱。
航行体的动力学方程是在体坐标系中建立的,波浪复势也应转换到体坐标系中。将波浪复势进行转换可得:
Φ′=∫dA(ω)eBφ0。
(3)
式中,
B=kyOB+i(ωt+ε-kxOBcosγ-kzOBsinγ);
(4)
ikcosγ[xcosθcosψ+y(sinψsinφ-sinθcosψcosφ)+
z(sinψcosφ+sinθcosψsinφ)]-
iksinγ[-xcosθsinψ+y(cosψsinφ-sinθsinψcosφ)+

(5)
xOB,yOB,zOB为航行体体坐标系原点在地面坐标系中的坐标,在航行体的动力学方程中为x0,y0,z0,这里加下标B是为了进行区分。
2.2 波浪扰动力数学模型
根据切片理论,航行体沿轴线上各切片所受的波浪力可由波浪复势求得。
由式(5),波浪在水下产生的附加压力场为:

(6)
式中,v为航行体的速度。
该压力场对单位长度的切片产生的在航行体体坐标系y、z方向的力为:

(7)

(8)
式中,S(x)为航行体某切片的横截面积。
波浪运动中,水下的流体质点做非定常运动,这将对航行体产生附加惯性力。航行体单位长度切片在体坐标系y、z方向的附加惯性力为:

(9)

(10)

以上得到了航行体各切片在波浪作用下的压力场力和附加质量力。由式(7)、式(8)、式(9)和式(10),则在航行体体坐标系中总的力和力矩为:


(11)


(12)

(13)

(14)
取Y、Z、My和Mz的实部即为波浪运动作用在航行体体坐标系下的力和力矩。
将式(11)、式(12)、式(13)和式(14)离散化后,即可采用切片法求解。本文中将航行体沿轴向切分,在头部、尾部形状变化较大处切分较细,在中部分切分较粗。一般说来,切片总数增加可以提高计算精度,实际计算表明,切片总数达到90左右,切片个数对波浪力计算精度的影响可忽略不计。本文将航行体沿轴向共切分90段,其中头部30段、中部25段、尾部45段。每一切片横截面的扰流可局部地看作二元流动,切片的附加质量与几何形状有关,简单的二元附加质量系数可根据无限长圆柱附加质量系数用保角变换求出。
3 波浪对航行体垂直出水发射影响分析
仿真计算航行体完全出筒瞬间到头部到达水面过程在不同海浪浪级和浪向角条件下出水姿态角的变化规律。计算工况如表1所示。
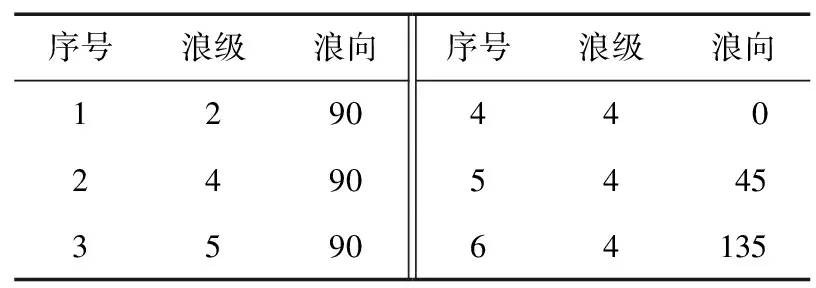
表1 计算工况
3.1 不同浪级条件下航行体姿态角响应分析
设置2/4/5级3种不同浪级,相同浪向角90°,相同发射深度H=30 m,相同出筒速度15 m/s,相同艇速2 kn,进行仿真计算和分析,计算结果如图1所示。

图1 不同浪级条件下航行体出水姿态角参数
计算结果表明:浪级越高,对航行体出水姿态角的扰动越强烈,侧向偏距也越大;这是由于海情等级的提升增加了流体质点的运动速度,显著提升了航行体所受的波浪力和波浪力矩,从而使波浪对航行体的扰动作用更强。
由于波浪的随机性,同一入射角条件下的波浪扰动力出现了不同的方向,而扰动力幅值随浪级的变高而变大,且同一海况下近水面处的幅值最大。
波浪对航行体出水过程的影响随航行体出水时间的增加而增加。因此,增加航行体出水速度、缩短航行体出水时间可以降低波浪对航行体出水运动的干扰。
3.2 不同浪向角条件下航行体姿态角响应分析
设定航行体在离管速度15 m/s,艇速2 kn,发射深度为30 m,海浪为3级,仿真计算浪向角分别为0°、45°、90°、135°以及无海浪条件下航行体出水姿态角参数,结果如图2所示。

图2 不同浪向条件下航行体出水姿态角参数
分析以上计算结果可知,相同浪级不同浪向角条件下航行体在水中运动的时间基本上是相同的。当浪向角为90°时,也就是当海浪传播方向与潜艇运动方向平行时,对航行体运动参数影响最大,航行体所承受的波浪力也越大,越靠近海面受海浪影响越大。
4 结束语
针对波浪扰动条件下水下垂直发射航行体出水姿态参数确定问题,建立了基于沿轴向切片方法的航行体在波浪扰动下的受力模型,结合航行体水中运动数学模型,采用计算航行体每一切片横截面受到波浪的惯性力、力矩方法,仿真分析了波浪对航行体出水姿态参数的影响。仿真结果表明,浪级越高,对航行体出水姿态角的扰动越强烈,侧向偏距越大。浪向角为90°时,对航行体运动参数影响最大,航行体所承受的波浪力也越大,越靠近海面受海浪影响越大。
[1] 倪火才.潜射导弹水下发射技术的发展趋势分析[J].舰载武器,2001(1):8-12.
[2] 谷良贤,李军政.海浪对运载器姿态的影响研究[J].西北工业大学学报,1997,15(4):1-5.
[3] 姜 涛.波浪模拟及其对航行体出水过程的影响研究[D].哈尔滨:哈尔滨工程大学,2010:4-9.
[4] 齐 鹏,王永学.三维数值波浪水池技术与应用[J].大连理工大学学报,2003,43(6):1-4.
[5] 叶取源,何友声.带尾翼弹体的水下和出水弹道计算[J].固体导弹技术,1987(1):1-11.
[6] 权晓波,孔德才,李 岩.波浪模拟及其对水下航行体出水过程影响[J].哈尔滨工业大学学报,2011,43(3):140-143.
[7] 李胜忠.基于Fluent的二维数值波浪水槽研究[D].哈尔滨:哈尔滨工业大学,2006:2-23.
[8] 周炫成.不同波浪环境下航行体出水过程模拟及载荷特性分析[D].哈尔滨:哈尔滨工业大学,2014:3-9
[9] 张重先.波浪扰动下的小型潜射导弹出水动力学建模与仿真[J].国防科技大学学报,2015,37(6):91-94.
[10] 冯学知.潜体近水面波浪力试验研究[J].船舶力学,1997,1(2):1-3.
李智生 男,(1975—),博士,高级工程师。主要研究方向:水下测量。
阎肖鹏 男,(1973—),高级工程师。主要研究方向:水下测量。
Research on Ocean Wave’s Impact on Vertical Motion of Underwater-launched Vehicle
LI Zhi-sheng1,YAN Xiao-peng1,LI Zhao2
(1.Unit91550,PLA,DalianLiaoning116023,China; 2.TheRocketForceMilitaryRepresentativeOfficeinShijiazhuang,ShijiazhuangHebei050002,China)
To determine the water-exiting attitude parameters of underwater-launched vehicle under wave disturbance,the vehicle body force model is established under wave disturbance based on the axial layered slicing method.Combining with the mathematical model of the underwater vehicle,the impact of ocean wave on vehicle attitude parameters is simulated by calculating the inertial force and torque on the vehicle.It’s shown that the higher the wave scale is,the stronger the disturbance on vehicle attitude angle will be.When the wave direction angle is 90°,the vehicle motion parameters are most seriously affected.
underwater vehicle;axial layered slicing method;wave scale and direction;water-exiting attitude parameters
10.3969/j.issn.1003-3106.2017.04.15
李智生,阎肖鹏,李 钊.波浪扰动对水下航行体垂直出水运动影响研究[J].无线电工程,2017,47(4):65-68.
2017-01-09
U661.1
A
1003-3106(2017)04-0065-04
猜你喜欢
数学物理学报(2022年4期)2022-08-22
学苑创造·A版(2022年4期)2022-06-18
数学物理学报(2021年4期)2021-08-30
北京航空航天大学学报(2021年7期)2021-08-13
疯狂英语·新读写(2021年6期)2021-08-05
当代陕西(2020年24期)2020-02-01
数学物理学报(2019年4期)2019-10-10
小哥白尼(趣味科学)(2018年12期)2018-12-18
中学生英语(2017年6期)2017-07-31
青年歌声(2017年6期)2017-03-13
