用一维集算法解相位干涉仪测角模糊
2017-03-27 21:46王鹏飞
电子技术与软件工程 2017年4期

摘 要 针对相位干涉仪测角模糊问题,传统的长短基线解模糊方法存在着局限性。本文用一维集算法解角度模糊,结合典型工作条件开展仿真计算。结果表明,可有效解出测角模糊,并对基线长度没有特殊要求,算法简单,对于工程应用具有较高的价值。
【关键词】一维集算法 相位干涉仪 角度模糊 解模糊
相位干涉仪在宽带超宽带的系统应用中具有测向精度高的优点,在侦察和被动雷达领域得到了广泛应用。
干涉仪的原理是利用天线所接收的回波信号之间的相位差来进行测角,相位差的准确与否直接关系着测角的精度。但由于鉴相器只能测量2π范围内的相位值,在相位干涉仪测向系统的工程实现中经常会遇到相位模糊问题,即鉴相器输出的相位差往往与实际的天线之间的相位相差2π的整数倍, 所以仅从鉴相器获得的相位差是一个存在模糊的不准确信息,这样就导致了测角模糊。因此,解模糊技术就成为了相位干涉仪测向系统工程应用中所需解决的关键问题。
传统干涉仪解模糊的方法是合理配置长短基线,利用长基线干涉仪保证测角精度,短基线干涉仪扩大单值测角视场。为了进行解模糊,要求两个基线长度要满足互质关系,如果当相位误差较大且模糊值较多时,无法正确解模糊。另外,随着信号频率的提高,要求的最短基线长度也越短。受到天线尺寸和测角精度的限制,传统的方法已无法满足信号测角解模糊的需要。
本文将雷达系统解距离模糊的一维集算法引入干涉仪测角系统,提出了一种解角度模糊的新算法,并通过仿真验证了所提出算法的有效性。
1 一维集算法原理
一维集算法的实质是用穷举法解同余方程组,计算时不需要对最大无模糊角度区间和模糊角度测量值进行量化,最早应用于解距离模糊,经过改进后可以解角度模糊。
一般地,假设雷达的频率是f,光速用c表示,所选择的基线1长度为d1,基线2长度为d2,P1为基线1对应的最大无模糊角度,P2为基线2对应的最大无模糊角度,M1为基线1对应的模糊角度测量值,M2为基线2对应的模糊角度测量值,T1j为基线1所有可能的角度测量值,T2j为基线2所有可能的角度测量值,MAX为目标雷达最大可能的方向角,MIN为目标雷达最小可能的方向角。解模糊的过程如下:
(4)计算所有子集的平均平方误差,选出最小值Emin,Emin所对应的子集称为最佳子集,该子集中2个元素的平均数为最终结果。
最小平方误差Emin可以作为结果可靠性的指标。当测量绝对精确时,Emin近似为0,但在实际中,由于角度的测量值总是有误差的,只要Emin的小于某一先验门限,则可认为结果是可信的。
2 一维集算法仿真
2.1 天线阵设计与建模
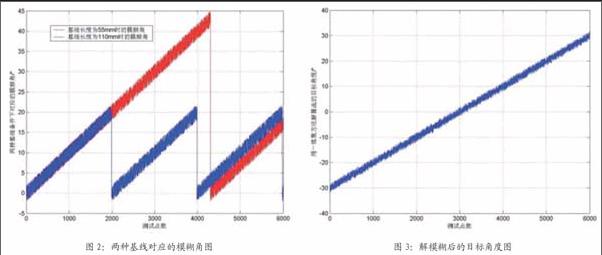
本文选取d1= 55mm ,d2=110mm 的两个相互垂直的双基线系统对频率为8GHz信号进行测向。可以看出,两个基线长度之间不需满足互质的关系,天线阵列布置如图1所示。
为了验证一维集算法解角度模糊的有效性,对该双基线干涉仪进行一维集算法解角度模糊仿真,具体实现过程如下:
(1)生成目标角度信息。假设目标出现在±30°的区间内,先取0.01度的步长,生成-30度到30度范围内的目标角度信息;
(2)生成模糊角信息。求出两种基线所对应的最大无模糊角分别为19.93°和42.99°,由于目标信号的范围是60°,大于两种基线的最大无模糊角,所以必然存在角度模糊问题,求出真实的目标角度在每种基线长度下的所有可能的模糊角信息。由于实际的测角过程中是有误差的,可以在生成的模糊角信息上加上随机的误差角,这里暂定为±2°以内;
用一维集的算法解模糊,求出真实的目标角度信息,并与目标角度信息进行比较,求出误差角。
2.2 仿真分析
仿真结果如下所示,从图2中可以看出两种基线所对应的模糊区间是不同的,同时由于测角的误差在±2度以内,所以在模糊角上又加入了测角误差带来的影响。从图3中可以看出,已经成功的根据上面的模糊角用一维集算法把真实的角度解出来,实现了测角解模糊。在此条件下所对应的误差角完全是由于加入的随机测角误差所带来的,目标真实角度解算正确。
3 结束语
通过以上分析和仿真可以说明,使用一维集算法可以有效的解出相位干涉仪测角模糊,并且对基线的长度选择没有特殊要求,算法实现起来也比较单,對于工程应用具有较高的价值。并且如果能够有一定的先验条件的话,用此算法解模糊的成功率会进一步提高。
参考文献
[1]司伟建.一种新的解模糊方法研究[J].制导与引信,2007,28(01):44-47.
[2]任鹏,李建军,周彬,王建水.多基线干涉仪解模糊算法[J].电子信息对抗技术,2015,30(03):6-8.
[3]雷文,龙文,曾涛,韩月秋.一种脉冲多普勒雷达解距离模糊的新算法[J].北京理工大学学报,1999,19(03):357-360.
作者简介
王鹏飞(1982-),男,河南省汝州市人。现为电子科技大学高级工程师。主要研究方向为雷达信号处理。
孙洪忠(1968-),男,河南省睢县人。现为中国空空导弹研究院研究员。主要研究方向为雷达系统总体设计。
作者单位
1.电子科技大学 四川省成都市 611731
2.中国空空导弹研究院 河南省洛阳市 471009