
一种用于红外光电系统的新型压电陶瓷扫描镜的反馈控制
2017-03-26 06:38赵灿兵周春芬胡志斌陈大乾
红外技术 2017年12期
赵灿兵,周春芬,胡志斌,刘 鹏,王 杰,陈大乾
一种用于红外光电系统的新型压电陶瓷扫描镜的反馈控制
赵灿兵,周春芬,胡志斌,刘 鹏,王 杰,陈大乾
(昆明物理研究所,云南 昆明 650023)
由于高精度位移传感器体积大、价格高,系统传递函数复杂难以辨识等因素,目前对于压电驱动的FSM大多通过前馈补偿的方法进行开环控制。为了实现对一种新型三支撑三维FSM的反馈控制,本文基于电阻应变片构建了反馈信号进行采集的系统,先用电阻应变片采集压电陶瓷得输出位移,然后通过标定系统将其转化为反射镜的偏转角度。并在此基础上,对系统的开环传递函数进行了辨识,得到了一个七阶的传递函数。实验证明,反馈信号采集系统能够兼顾体积和精度,所获得的传递函数能够较好地拟合该系统的动态特性,为后续控制算法的设计实现奠定了很好的基础。
快速扫描镜;红外光电系统;反馈控制;传递函数
0 引言
FSM是Fast steering mirror(快速扫描镜)的简称,是一种可以控制光束实现精密指向或者快速扫描的器件。在空间光通信、航天技术、激光雷达、激光加工等领域都有很大的应用前景[1-2]。基于压电陶瓷驱动的FSM,因其具有体积小、功耗小、精度高,响应速度快,控制带宽高等优点,在红外凝视成像系统以及高精度综合光电稳瞄系统中有多方面的应用[3]。
在红外凝视成像系统中应用FSM来实现的微扫描技术,可以在不改变探测器热灵敏度、探测器像元总数、光学系统结构的前提下,一方面能够有效提高热像系统的空间分辨率,另一方面可以实现热像系统一定范围内的扫描跟踪,扩大了热像系统的视场。在传统的综合光电稳瞄系统的传感器光路中增加FSM以构成两级控制系统,通过传感器内部的精密控制来弥补外部稳瞄系统的残余误差,可以有效地提高整个系统的瞄准线控制精度。此外,在扫描任务中,通过控制FSM对运动进行补偿,可以有效地消除由于稳瞄系统快速运动带来的图像抖动模糊等问题。
基于压电陶瓷的快速扫描镜,要实现多维度的高精度快速扫描,对压电陶瓷系统的精密控制是最关键的技术。传统的开环前馈控制虽然可以较好地抑制压电陶瓷的迟滞效应所带来的非线性,但是扫描镜系统的复杂机构会产生各个频率的机械谐振,这会大大降低系统控制带宽,需要通过反馈控制对其进行有效的抑制[4-5]。
1 新型三维FSM及其反馈控制
为实现复杂的多维度高精度快速扫描,我们设计了如图1所示的快速扫描镜。为了达到高精度、高频率、快速响应的效果,选用压电陶瓷作为驱动器;为了实现较大角度的扫描,采用了位移放大机构和柔性铰链;同时,为了保证小体积和低功耗,采用三支撑结构。该FSM可以控制光束实现3个维度的运动,中间陶瓷不动左右两个陶瓷反向运动可以驱动反射镜实现方向偏转,左右两个陶瓷同步动中间陶瓷与之反向运动可以驱动反射镜实现方向偏转,3个陶瓷同步运动可以驱动反射镜实现方向的前后运动。
位移放大机构、柔性铰链以及三支撑结构这些有效提高了FSM性能的措施都大大增加了FSM的控制难度。为了实现精密控制,构建了如图2所示的反馈控制系统。首先,通过电阻应变片来采集压电陶瓷的输出位移;然后,在采集的位移数据的基础上,通过模型辨识算法建立系统的控制传递函数模型;最后,在系统的传递函数模型的基础上,进一步进行控制算法的设计与实现。
2 位移信号的采集与标定
位移信号采集电路原理结构如图3所示,先用惠斯通直流电桥将应变片的电阻信号转化为电压信号,再经过精密放大滤波电路将信号放大,滤除噪声,最后由精密ADC将模拟信号转化为位移数据。
在完成了位移数据的采集后,为了保证数据能满足反馈控制的要求,进一步对信号进行标定,得到图4所示的标定曲线,其中轴为应变片所测位移信号,轴为PSD所测反射镜偏转角度信号。可根据测试数据进一步计算二者的相关系数:
式中:LXX为应变片数据的自相关系数;Lxx为PSD数据的自相关系数;LxX为二者的互相关系数。有曲线及相关系数可知,电阻应变片测得信号与反射镜偏转角度的关系近乎一条直线,相关系数高达0.99954,电阻应变片测得的信号可用于反馈控制[6-7]。
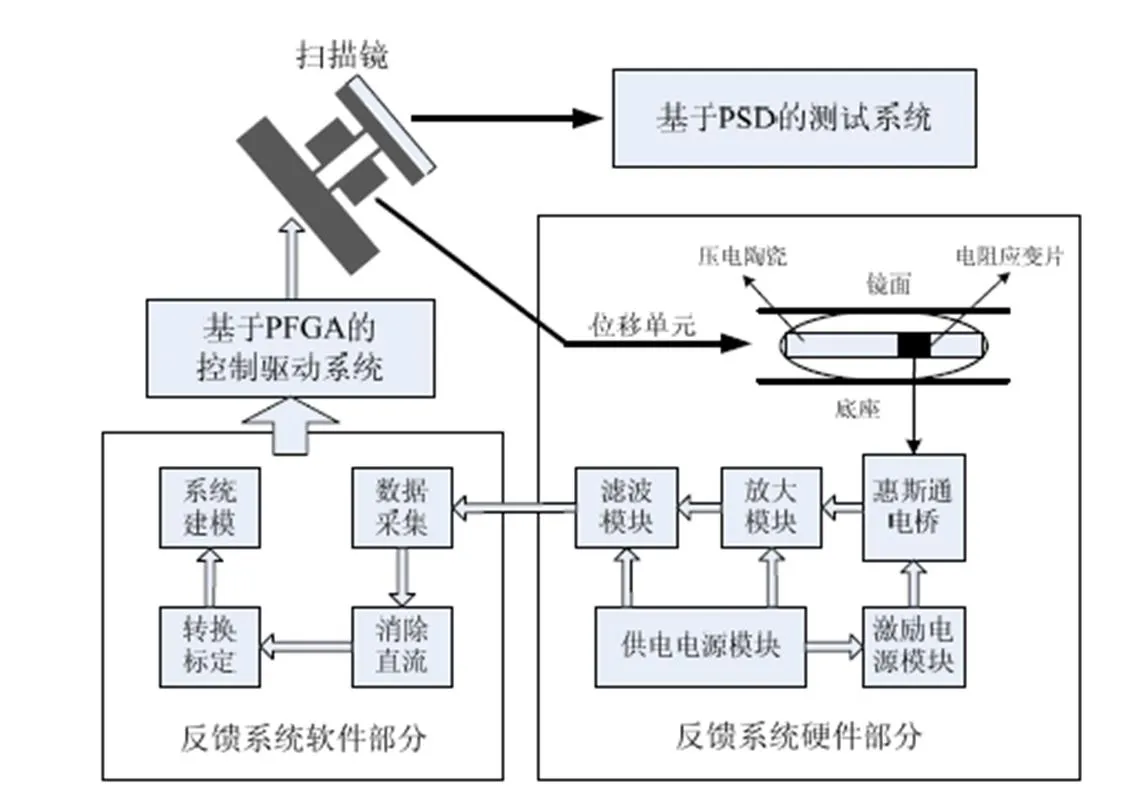
图2 反馈控制系统示意图

图3 信号采集电路原理结构图

图4 应变片标定
Fig.4 Demarcate of strain gage
3 系统控制模型的分析与辨识
在用电阻应变片获得了良好的反馈信号之后,想要设计并实现反馈控制,要先进行系统模型的辨识,获得系统的开环传递函数模型是进行控制设计的基础。本文采用解析法和实验法相结合的方式,先根据物理规律和实验数据对系统中的关键环节进行分析,然后再通过数值计算来获得系统的参数,最终得到系统的开环传递函数[8-10]。
本文所研究的快速扫描镜系统传递函数框图如图5所示,系统的开环传递函数包括了驱动环节1(),压电陶瓷环节2()以及机械结构环节3()。其中驱动环节,为线性放大电路,将控制芯片输出的驱动信号进行放大,该环节等效为系数1。
在合理论分析的基础上,进一步根据实际测得的幅频响应曲线,我们估计系统的传递函数模型为:

式中:1、2以及p(=1,2,…,12)为待辨识参数。本文采用最小二乘法,对上述的系统传递函数分环节进行参数辨识,最终再把各个环节乘到一起得到了最终的传递函数。图6所示是辨识结果与实测结果的幅频响应和相频响应比较图。
从幅频曲线看,在频率为1000Hz以前的拟合曲线和实测曲线重合得很好。超过1000Hz以后,拟合曲线与实测曲线有较大误差,但是基本形状类似,这说明参数模型是正确的,拟合的过程没有达到最优解。但是这个结果已经满足系统所要求的500Hz带宽,可用该结果进行控制算法的设计。
从相频曲线看,拟合结果与实测结果虽有一定差距,但是曲线的形状是一致的。

图5 系统传递函数框图
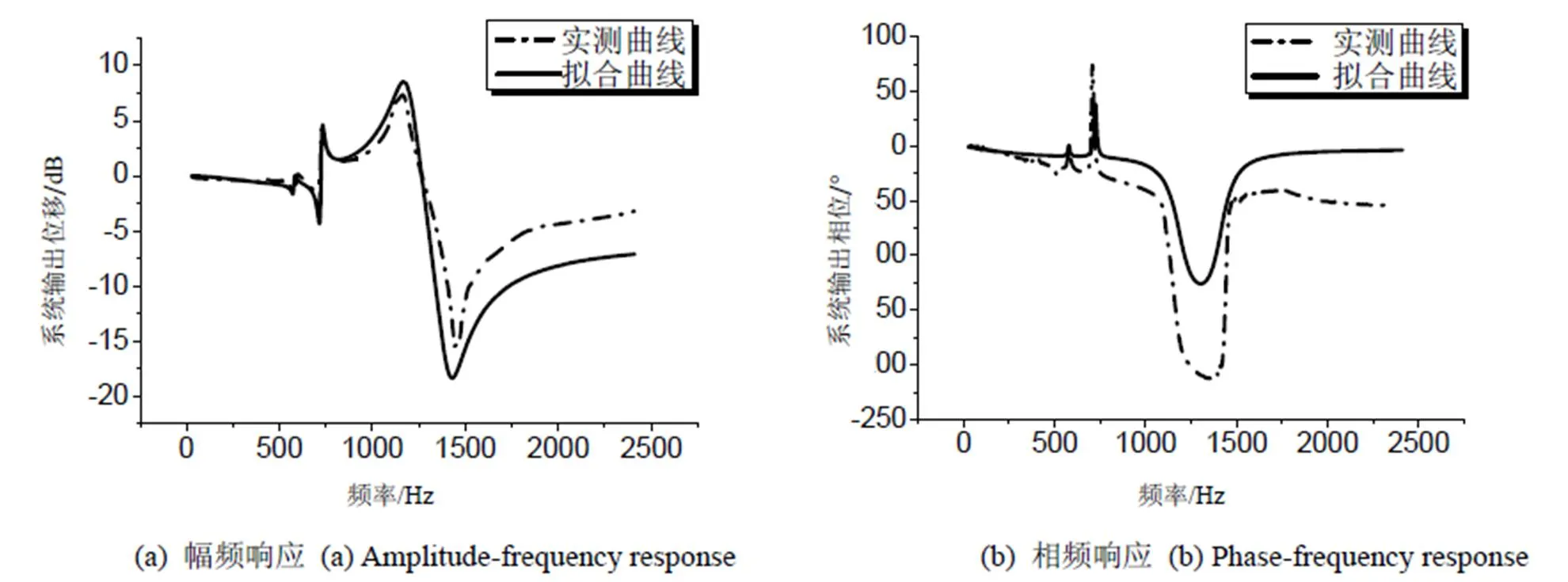
图6 幅频响应、相频响应拟合曲线与实测曲线比较图
4 总结
本文主要研究了一种新型三维压电陶瓷驱动的FSM子镜的反馈控制技术,设计了电阻应变片的信号处理电路,对采集的反馈数据进行了处理,使得由反馈通道所获取的信号可用于系统的反馈控制。深入的分析了基于压电陶瓷的扫描镜的开环传递函数模型。在理论分析的基础,根据实验测得的幅频响应曲线和相频响应曲线,确定了系统传递函数的结构。采用最小二乘算法,完成了系统传递函数的参数辨识,获得了7阶的系统传递函数,能够很好地拟合实测曲线。
[1] 吴鑫. 高性能快速控制反射镜研究[D]. 武汉: 华中科技大学, 2012.
WU Xin. Research on High-performance Fast Steering Mirror[D]. Wuhan: Huazhong University of Science & Technology, 2012.
[2] Kluk D J. An Advanced Fast Steering Mirror for Optical Communication [D].:, 2007: 45-46.
[3] Hafez M, Sidler T C, Salathe R P. Design, simulations and experimental investigations of a compact single mirror tip/tilt laser scanner[J]., 2000, 10(7): 741-760.
[4] Loney G C.Design of a high bandwidth steering mirror for space-based[J]., 1991, 1543: 225-235.
[5] Ulander K.[D]. San Luis Obispo: California Polytechnic State University, 2006: 31-34.
[6] Narth H, Donat M. Latest experience in design of piezoelectric driven fine steering mirrors[J]., 1991, 1546: 248-261.
[7] Mitchell P V, Griffith P B, Henderson D K. Fast-steering mirrors improve active beam stabilization [J]., 2001, 1247: 35-43.
[8] 王永辉. 快速控制反射镜结构及其动态特性的研究[D]. 长春: 中科院长春光学精密机械与物理研究院, 2004.
WANG Yonghui.[D]. Changchun: Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, 2004.
[9] JIANG Ming K, TAO T, CHENG Yu F. Simulation of the fast steering mirror control system based on Gyro[C]//2009, 2009, 1643: 215-227.
[10] 邵兵. 激光星间通信终端精瞄微定位系统关键技术的研究[D]. 哈尔滨: 哈尔滨工业大学, 2006.
SHAO Bing. Research on Key Technology of Fine Pointing Micro-positioning System for Laser Intersatellite Communication Terminal[D].:, 2006.
Feedback Control of a New Kind of FSM for Infrared Opto-electric System
ZHAO Canbing,ZHOU Chunfen,HU Zhibin,LIU Peng,WANG Jie,CHEN Daqian
(,650223,)
Because precise feedback sensors are expensive and their transfer function is very complex, most FSM(fast steering mirrors) driven by PZT(PbZrTi03) use open-loop control technology. To implement closed-loop control for a new kind of three-dimensional FSM driven by three piezo ceramics, this thesis builds a feedback-signal acquisition system that uses a resistance strain gauge to obtain the lineardisplacement of the PZT, which is subsequently translated into angulardisplacementof the mirror through a calibrationsystem. As a basis for this acquisition system, the open-loop transfer function model of an FSM system was studied. The RLS(recursive least square) algorithm was used for parameter identification, and a transfer function model of the system was built successfully. Experimental results show that the feedback-signal acquisition system has high precision and the advantages of a small volume. The transfer function model fit the system acceptably.
fast steel mirror,infrared opto-electric system,feedback control,transfer function
TN216
A
1001-8891(2017)12-1083-04
2016-04-10;
2017-03-30.
赵灿兵(1988-),工程师/硕士,主要研究方向:红外成像技术。E-mail:234983973@qq.com。
猜你喜欢
新能源科技(2022年9期)2022-11-20
农业工程学报(2022年13期)2022-10-09
电气电子教学学报(2022年3期)2022-07-30
灌溉排水学报(2022年6期)2022-07-13
燃料化学学报(2022年5期)2022-05-30
水泥工程(2020年4期)2020-12-18
环境技术(2020年1期)2020-03-06
海军航空大学学报(2015年1期)2015-11-11
中国光学(2015年1期)2015-06-06
遥测遥控(2015年2期)2015-04-23
